You might also like
- Notas de Clase - BermeoDocument57 pagesNotas de Clase - BermeoGustavo AvilaNo ratings yet
- Sem 9aDocument12 pagesSem 9aaaaaNo ratings yet
- Acciones Basicas de ControlDocument12 pagesAcciones Basicas de ControlJesús GonzálezNo ratings yet
- CODIES2022 - Cap6 - Regulador PIDDocument12 pagesCODIES2022 - Cap6 - Regulador PIDJose BiaforeNo ratings yet
- 06 Diseño Controladores PID 2021Document101 pages06 Diseño Controladores PID 2021Cristian David Merchan VegaNo ratings yet
- Ejemplos de Modelado de Sistemas Continuos - 33pDocument33 pagesEjemplos de Modelado de Sistemas Continuos - 33pAldo2686No ratings yet
- Controladores PID: P: Acción de Control Proporcional, Da Una Salida Del Controlador Que EsDocument5 pagesControladores PID: P: Acción de Control Proporcional, Da Una Salida Del Controlador Que EsFrancisco MartinezNo ratings yet
- Pid PDFDocument5 pagesPid PDFJaime M Barrera CastilloNo ratings yet
- Controladores PID: P: Acción de Control Proporcional, Da Una Salida Del Controlador Que EsDocument5 pagesControladores PID: P: Acción de Control Proporcional, Da Una Salida Del Controlador Que EsDaniel VanegasNo ratings yet
- Ejemplo SintonizaciónDocument10 pagesEjemplo Sintonizaciónchau_riberNo ratings yet
- Laboratorio N°4Document23 pagesLaboratorio N°4Kevin Palma100% (1)
- Semana 3Document6 pagesSemana 3BRAYAMNo ratings yet
- C03-Linealización y Función de Transferencia PDFDocument56 pagesC03-Linealización y Función de Transferencia PDFEnrique VidalNo ratings yet
- Informe Final N2-Controlador PIDDocument10 pagesInforme Final N2-Controlador PIDMichael Infantes HuacancaNo ratings yet
- Fase 4 AportesDocument13 pagesFase 4 Aportesgerman.toro3885No ratings yet
- TAREA 1 - Morales Soto Andrea PamelaDocument6 pagesTAREA 1 - Morales Soto Andrea PamelaMorales Soto Andrea PamelaNo ratings yet
- Control por discretización de sistemas en tiempo continuoDocument20 pagesControl por discretización de sistemas en tiempo continuoEdilberto MonteroNo ratings yet
- Sintonización de Controladores PIDDocument45 pagesSintonización de Controladores PIDluisNo ratings yet
- Control Onoff PidDocument40 pagesControl Onoff PidJose Francisco CamachoNo ratings yet
- PID en PICDocument9 pagesPID en PICArmando Pérez ReynosoNo ratings yet
- Ejercicios ProcesosDocument13 pagesEjercicios ProcesosFernando FariñasNo ratings yet
- Tema 05 - Sistemas RealimentadosDocument12 pagesTema 05 - Sistemas RealimentadosSebastian Rodrigo Contreras GamboaNo ratings yet
- Tema5 ControlUAVDocument81 pagesTema5 ControlUAVdperello2002No ratings yet
- Platica Ing PalomeraDocument32 pagesPlatica Ing PalomeraAlberto CastroNo ratings yet
- Circuitos Electrónicos Amplificadores 2020Document49 pagesCircuitos Electrónicos Amplificadores 2020Marilyn V.HNo ratings yet
- Algoritmi de ReglareDocument35 pagesAlgoritmi de ReglareMarius PlesaNo ratings yet
- Clase 3Document45 pagesClase 3hmecheverryhNo ratings yet
- Asignación Final. Control de Temperatura de Un CSTRDocument20 pagesAsignación Final. Control de Temperatura de Un CSTRMargarita HeraouiNo ratings yet
- Semana 8Document28 pagesSemana 8pathy cocreNo ratings yet
- Retardos de Transporte y Controladores Digitales Discretizados PDFDocument38 pagesRetardos de Transporte y Controladores Digitales Discretizados PDFEdgar GuerreroNo ratings yet
- Quiz No. 11 OTCM Control - Grupal 2021-01 Nivel de TanqueDocument6 pagesQuiz No. 11 OTCM Control - Grupal 2021-01 Nivel de TanqueCamilo AraqueNo ratings yet
- Tema 05 - Sistemas RealimentadosDocument12 pagesTema 05 - Sistemas RealimentadosjosesadidNo ratings yet
- Formacion Especifica Tarea ISE8 2 1Document35 pagesFormacion Especifica Tarea ISE8 2 1Lau BenalcazarNo ratings yet
- Controladores DiscretosDocument12 pagesControladores DiscretosEdmundo R. NeriaNo ratings yet
- Automatico Tema 1Document17 pagesAutomatico Tema 1Victor Rebollal MendoNo ratings yet
- ADA3Document17 pagesADA3Adriana CámaraNo ratings yet
- SCD Lab1-PreinfDocument4 pagesSCD Lab1-PreinfLuis RubioNo ratings yet
- Informe 6 Señales y Sistemas Ricardo Yauri MartinezDocument14 pagesInforme 6 Señales y Sistemas Ricardo Yauri MartinezEdwin Toledo0% (1)
- Control de ProcesosDocument14 pagesControl de ProcesosAnonymous OeBttSNo ratings yet
- Tema 09 - Identificación y Especificaciones en El Dominio de La FrecuenciaDocument7 pagesTema 09 - Identificación y Especificaciones en El Dominio de La FrecuenciaoverandresNo ratings yet
- TAREA 1 - Morales Soto Andrea PamelaDocument6 pagesTAREA 1 - Morales Soto Andrea PamelaMorales Soto Andrea PamelaNo ratings yet
- Fundamentos de Control Predictivo de Procesos Instrumentación y Control de ProcesosDocument7 pagesFundamentos de Control Predictivo de Procesos Instrumentación y Control de ProcesosEdgar HuancaNo ratings yet
- Mtodob 1 With Cover Page v2Document10 pagesMtodob 1 With Cover Page v2jose morenoNo ratings yet
- CualquieraDocument55 pagesCualquieraLuis Alberto Gómez100% (1)
- Simulación de Un Intercambiador de CalorDocument7 pagesSimulación de Un Intercambiador de CalorJazmin Flores MondragónNo ratings yet
- Métodos de Sintonización en Un Lazo de ControlDocument13 pagesMétodos de Sintonización en Un Lazo de ControlayskelNo ratings yet
- Tema 03 - Análisis de Sistemas Lineales en El Dominio Del TiempoDocument17 pagesTema 03 - Análisis de Sistemas Lineales en El Dominio Del TiempoAlejandro BejaranoNo ratings yet
- Tema2.RepresMatematicaDeLosModelos AluDocument43 pagesTema2.RepresMatematicaDeLosModelos AluKevin arancibia calderonNo ratings yet
- Laboratorio 6 Elt3752!1!2019xDocument7 pagesLaboratorio 6 Elt3752!1!2019xAntonio MoyaNo ratings yet
- EvaluacionFinal Grupo 2Document24 pagesEvaluacionFinal Grupo 2Luis German CeronNo ratings yet
- Polinomio Característico DeseadoDocument22 pagesPolinomio Característico DeseadoEduardo ChiraNo ratings yet
- 100 circuitos de shields para arduino (español)From Everand100 circuitos de shields para arduino (español)Rating: 3.5 out of 5 stars3.5/5 (3)
- Problemas resueltos de Hidráulica de CanalesFrom EverandProblemas resueltos de Hidráulica de CanalesRating: 4.5 out of 5 stars4.5/5 (7)
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasFrom EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasRating: 5 out of 5 stars5/5 (1)
- Tablas TC Pt100Document18 pagesTablas TC Pt100Alain Chacón100% (1)
- Arian RTD ConexxionesDocument6 pagesArian RTD ConexxionesJose Ramon Escobar AlfaroNo ratings yet
- Procesos SupergenosDocument20 pagesProcesos SupergenosErgan LabrañaNo ratings yet
- Procesos SupergenosDocument20 pagesProcesos SupergenosErgan LabrañaNo ratings yet
- Taller Ejercicio Balance de Masa (2020-1)Document1 pageTaller Ejercicio Balance de Masa (2020-1)Lissette PérezNo ratings yet
- DS 5Document33 pagesDS 501-IC-HU-DAVID STIVEN DELGADILLO IPARRAGUIRRENo ratings yet
- Cálculo de calorías absorbidas en un reactor de oxidación de SO2Document3 pagesCálculo de calorías absorbidas en un reactor de oxidación de SO2Estefania Rosero Rodriguez100% (1)
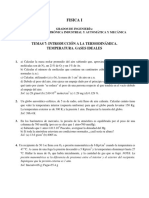
- Termodinámica e introducción a gases ideales en Física IDocument2 pagesTermodinámica e introducción a gases ideales en Física IManolo EldelbomboNo ratings yet
- Calculo de Encofrados para Techo AligeradoDocument3 pagesCalculo de Encofrados para Techo AligeradoREINER0% (1)
- FISICA II FIN 20 NOVIEMBRE (Corrección Logo) - 091045Document173 pagesFISICA II FIN 20 NOVIEMBRE (Corrección Logo) - 091045Oliver Valdes100% (1)
- Taller 2 TI Aplicaciones ED OrdenDocument4 pagesTaller 2 TI Aplicaciones ED Ordenjosua0% (1)
- 01nnACTIVIDADn01nAnalizarncircuitosntnncnicosn1 (Sergio Robledo)Document12 pages01nnACTIVIDADn01nAnalizarncircuitosntnncnicosn1 (Sergio Robledo)Sergio RobledoNo ratings yet
- Ecuaciones constitutivas de láminas: teoría de elasticidad y ley de comportamientoDocument20 pagesEcuaciones constitutivas de láminas: teoría de elasticidad y ley de comportamientoAntonio Jimenez RecioNo ratings yet
- Guía de Ejercicios de Teoría de CircuitosDocument65 pagesGuía de Ejercicios de Teoría de CircuitosDiego Alejandro DevotoNo ratings yet
- Clase Conduccion Termica 2015 FinalDocument53 pagesClase Conduccion Termica 2015 Finalgelp221No ratings yet
- Fenomenos II (Unidas 5)Document31 pagesFenomenos II (Unidas 5)Vanessa UrbinaNo ratings yet
- Fisica Fundamental Tercero Basico EjercicioDocument5 pagesFisica Fundamental Tercero Basico EjerciciomaidaNo ratings yet
- Leyes de Kirchhoff en circuitos eléctricosDocument8 pagesLeyes de Kirchhoff en circuitos eléctricosMario Alejandro RamirezNo ratings yet
- PrevenciónRiesgosDocument5 pagesPrevenciónRiesgosAnonymous 0iuLGhqPKaNo ratings yet
- Matriz 3.2 UltimaDocument14 pagesMatriz 3.2 UltimaMiguel Garcia100% (1)
- Vect116 133 (Trilce) CortarDocument3 pagesVect116 133 (Trilce) CortarIvan Lenin Rivera RodriguezNo ratings yet
- Informe Corte DirectoDocument7 pagesInforme Corte DirectoCamilo LeonNo ratings yet
- Tema 3 - Modelo Del GeneradorDocument23 pagesTema 3 - Modelo Del GeneradorEduardo HenriquezNo ratings yet
- Guia P5 3MDocument5 pagesGuia P5 3MMauricio Prado VenegasNo ratings yet
- Programación de conductas básicas de imitaciónDocument37 pagesProgramación de conductas básicas de imitaciónMagdl OrtegaNo ratings yet
- La Primera Ley de La TermodinámicaDocument3 pagesLa Primera Ley de La TermodinámicaHarim Serrato80% (5)
- CosmoquímicaDocument100 pagesCosmoquímicaSam GarcíaNo ratings yet
- Principios de RefrigeracionDocument27 pagesPrincipios de RefrigeracionRandi Zito Sanchez100% (1)
- 2M Física Guía-2Document5 pages2M Física Guía-2Milena Medina molinaNo ratings yet
- Cdu PDFDocument100 pagesCdu PDFLuis Sotomayor100% (1)
- Transformador monofásicoDocument7 pagesTransformador monofásicoJuan D. PatronNo ratings yet
- Problemas Fenomenos de SuperficieDocument1 pageProblemas Fenomenos de Superficiecarla98No ratings yet
- Aplicación Física de La DerivadaDocument3 pagesAplicación Física de La DerivadaJorge CristaldoNo ratings yet
- Heidegger-LA PREGUNTA POR LA TÉCNICADocument15 pagesHeidegger-LA PREGUNTA POR LA TÉCNICAAna De Gea SánchezNo ratings yet