You might also like
- CAN Basic TraininigDocument56 pagesCAN Basic TraininigCami RoșcaNo ratings yet
- Austsignpostmathsnsw sb9 5.1-3 00Document24 pagesAustsignpostmathsnsw sb9 5.1-3 00Minus Venus0% (3)
- Controller Area NetworkDocument31 pagesController Area Networkanjumara12No ratings yet
- Can BusDocument33 pagesCan Busplugas100% (1)
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- CANBus: (1) How It Works, (2) Case Applications For Nissan Leaf & Volvo S80Document33 pagesCANBus: (1) How It Works, (2) Case Applications For Nissan Leaf & Volvo S80yogapost100% (3)
- 3G Accessibility: The Ability of A User To Obtain A Requested Accessibility Service From The SystemDocument13 pages3G Accessibility: The Ability of A User To Obtain A Requested Accessibility Service From The SystemRajesh KumarNo ratings yet
- MathDocument4 pagesMathHermann Dejero LozanoNo ratings yet
- Exception CodesDocument7 pagesException Codesjamos200No ratings yet
- EDN Design Ideas 1998Document166 pagesEDN Design Ideas 1998chag1956100% (4)
- V1 N2 1980 RabenhorstDocument6 pagesV1 N2 1980 Rabenhorstraa2010No ratings yet
- CANopen Dictionary v7Document67 pagesCANopen Dictionary v7bozzec100% (1)
- Handbook of Operational Amplifier ApplicationsDocument94 pagesHandbook of Operational Amplifier Applicationshermiit89% (9)
- Pre Calculus MIdTermsDocument5 pagesPre Calculus MIdTermsLamette Austria Ayong0% (1)
- Bodybuilder Guidelines: Update: 2011-22Document438 pagesBodybuilder Guidelines: Update: 2011-22thkimzone73100% (12)
- Can Basics PrintDocument4 pagesCan Basics PrintiamneodaNo ratings yet
- Technical Description: Infi90/Symphony/Harmony - ControlwayDocument6 pagesTechnical Description: Infi90/Symphony/Harmony - ControlwayYhony Gamarra VargasNo ratings yet
- FAQs - G7, GRACoL, ISO 12647-2 PDFDocument5 pagesFAQs - G7, GRACoL, ISO 12647-2 PDFSappiETC50% (2)
- Which Parameters Helps To Reduce TCH Congestion Rate in Huawei SystemDocument2 pagesWhich Parameters Helps To Reduce TCH Congestion Rate in Huawei SystemAbdoul Karim MamaniNo ratings yet
- Controller Area Network (CAN)Document8 pagesController Area Network (CAN)Sreekantharasah ThanujanNo ratings yet
- Protocol RS 485Document3 pagesProtocol RS 485Utpal100% (6)
- Protocol CAN - Part ADocument31 pagesProtocol CAN - Part AUtpal100% (2)
- Protocol CAN - Part ADocument31 pagesProtocol CAN - Part AUtpal100% (2)
- USB Protocol Specification: Data Encoding/DecodingDocument12 pagesUSB Protocol Specification: Data Encoding/DecodingUtpal100% (5)
- CCNA Questions July 2019Document294 pagesCCNA Questions July 2019Emmanuel Teixeira de SousaNo ratings yet
- CAN BusDocument9 pagesCAN Buspablodanielrigo100% (2)
- 7.GSM ChannelsDocument24 pages7.GSM Channelsmanthasaikarthik100% (1)
- Troubleshooting For GSM KPIsDocument5 pagesTroubleshooting For GSM KPIsbinoNo ratings yet
- Indoor Radio Planning: A Practical Guide for 2G, 3G and 4GFrom EverandIndoor Radio Planning: A Practical Guide for 2G, 3G and 4GRating: 5 out of 5 stars5/5 (1)
- 2 Overview of Call Admission Control: Load Control Feature Parameter DescriptionDocument2 pages2 Overview of Call Admission Control: Load Control Feature Parameter DescriptionShijinesh Kumar P KNo ratings yet
- 8 International CAN Conference: Using CAN Arbitration For Electrical Layer TestingDocument11 pages8 International CAN Conference: Using CAN Arbitration For Electrical Layer TestingAmitai BroydeNo ratings yet
- Can Basics PrintDocument4 pagesCan Basics PrintfioccoNo ratings yet
- Protocol Automotive IndustryDocument17 pagesProtocol Automotive IndustryUtpal100% (8)
- 12-Bit Low-Power Fully Differential Switched Capacitor Noncalibrating Successive Approximation ADC With 1 MSsDocument6 pages12-Bit Low-Power Fully Differential Switched Capacitor Noncalibrating Successive Approximation ADC With 1 MSsThanos van RamNo ratings yet
- Icc 2015 Mutter 1Document8 pagesIcc 2015 Mutter 1Eric FabianNo ratings yet
- CDMA Performance Parameters (1x) V3.0Document326 pagesCDMA Performance Parameters (1x) V3.0ابراهيم معوضةNo ratings yet
- CDMA Performance Parameters (1x) V3.0 PDFDocument326 pagesCDMA Performance Parameters (1x) V3.0 PDFابراهيم معوضةNo ratings yet
- CAN On The AVRDocument17 pagesCAN On The AVRMagdalena JasińskaNo ratings yet
- SAR ADC TutorialDocument13 pagesSAR ADC Tutorialvigneshk100% (3)
- Software UART Using PCADocument13 pagesSoftware UART Using PCAplcmanaNo ratings yet
- AN-ISC-8-1095 CRC Check With CANbedded CAN StackDocument8 pagesAN-ISC-8-1095 CRC Check With CANbedded CAN Stackqplygxlj9No ratings yet
- Rab SubflowDocument3 pagesRab SubflowBilal RaoNo ratings yet
- SerialBusSystems Part2 ElektronikAutomotive 200612 PressArticle enDocument6 pagesSerialBusSystems Part2 ElektronikAutomotive 200612 PressArticle enkyawoo.sgNo ratings yet
- An-InD-1-004 Diagnostics Via Gateway in CANoeDocument80 pagesAn-InD-1-004 Diagnostics Via Gateway in CANoeUpendra VaddeNo ratings yet
- AVR352 Using Coulomb Counting ADC Doc8078Document7 pagesAVR352 Using Coulomb Counting ADC Doc8078dgujarathiNo ratings yet
- CCNA 3 Final Exam V4Document22 pagesCCNA 3 Final Exam V4ajohnson79No ratings yet
- Ss2 PaperDocument5 pagesSs2 Paperalizadehghasem65No ratings yet
- RS CanfdDocument60 pagesRS CanfdKhôi Nguyễn ĐăngNo ratings yet
- Number: 000-000 Passing Score: 800 Time Limit: 120 Min File Version: 1.0Document15 pagesNumber: 000-000 Passing Score: 800 Time Limit: 120 Min File Version: 1.0Gabriela PopescuNo ratings yet
- 1149 6 TutorialDocument9 pages1149 6 TutorialAmit MadupuNo ratings yet
- Standards: Version 1 ECE, IIT KharagpurDocument9 pagesStandards: Version 1 ECE, IIT KharagpurRudra KNo ratings yet
- SwitchDocument61 pagesSwitchapi-216820839No ratings yet
- Canbus - Hardware DescriptionDocument6 pagesCanbus - Hardware DescriptionThiago DomingosNo ratings yet
- CCNAquestions July 2019 PDFDocument294 pagesCCNAquestions July 2019 PDFAlbertoNo ratings yet
- Hillstone All Series Device Troubleshooting and Debug GuideDocument134 pagesHillstone All Series Device Troubleshooting and Debug GuideWAMS FILE100% (1)
- Commissioning Example Scalable PLC For Individual AutomationDocument8 pagesCommissioning Example Scalable PLC For Individual AutomationJuan Pablo Galvan CamachoNo ratings yet
- CAN CommunicationDocument15 pagesCAN Communicationshanku kakNo ratings yet
- Computer Networks and SecurityDocument24 pagesComputer Networks and SecurityKamal ThelagaNo ratings yet
- CAN Stands ForDocument12 pagesCAN Stands Forns0447496No ratings yet
- Ad Seaman Provider Edge Bridge Spanning Tree 0205 11Document4 pagesAd Seaman Provider Edge Bridge Spanning Tree 0205 11Mirko MirkosNo ratings yet
- CCNP2 - Implementing Secure Converged Wide-Area Networks v5.0Document13 pagesCCNP2 - Implementing Secure Converged Wide-Area Networks v5.0asdfgh147No ratings yet
- OCI Connect Between TenanciesDocument8 pagesOCI Connect Between Tenanciessss pppNo ratings yet
- Acuvim II Power Meter DNP3 User Manualv2 ENDocument18 pagesAcuvim II Power Meter DNP3 User Manualv2 ENAris van RaiserNo ratings yet
- TD - Chapter7 - Data Link Control Protocols - Correction-Groupe7Document7 pagesTD - Chapter7 - Data Link Control Protocols - Correction-Groupe7joseph lecoderNo ratings yet
- Chapter 3Document56 pagesChapter 3Phạm Trường SinhNo ratings yet
- Chapter 1 IntroductionDocument39 pagesChapter 1 IntroductionNivedini KuttiNo ratings yet
- Can Interview Questions: 1. What Is CAN? Answer: 1. CAN Is A Multi Master Broadcast Serial Bus Standard For Connecting Electronic ControlDocument59 pagesCan Interview Questions: 1. What Is CAN? Answer: 1. CAN Is A Multi Master Broadcast Serial Bus Standard For Connecting Electronic Controlboobalkrishnan2576No ratings yet
- Data Link Control and ProtocolsDocument61 pagesData Link Control and ProtocolsusitggsipuNo ratings yet
- SMAC LCC-10 Product Manual Rev1 0Document22 pagesSMAC LCC-10 Product Manual Rev1 0joaoluNo ratings yet
- WAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksFrom EverandWAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Protocol Spanning TreeDocument12 pagesProtocol Spanning TreeUtpal100% (2)
- Can 20Document38 pagesCan 20api-3721578No ratings yet
- Snubber Circuit - Theory, Design and ApplicationDocument18 pagesSnubber Circuit - Theory, Design and ApplicationUtpal100% (10)
- Common Emitter AmplifierDocument4 pagesCommon Emitter AmplifierUtpal100% (2)
- Snubber Circuit - RC Snubber Design Using TRIACsDocument18 pagesSnubber Circuit - RC Snubber Design Using TRIACsUtpal100% (2)
- Design Guidelines For Bipolar Transistor Audio Pre Amplifier CircuitsDocument4 pagesDesign Guidelines For Bipolar Transistor Audio Pre Amplifier CircuitsUtpal100% (5)
- Common Base (BJT) - Common Gate (MOSFET) CircuitsDocument3 pagesCommon Base (BJT) - Common Gate (MOSFET) CircuitsUtpal100% (3)
- Analog Automotive Guide - Texas InstrumentsDocument21 pagesAnalog Automotive Guide - Texas InstrumentsUtpal100% (1)
- Switching Regulator Basics - 1Document3 pagesSwitching Regulator Basics - 1Utpal100% (1)
- Binary PDFDocument13 pagesBinary PDFbyprasadNo ratings yet
- Measures of Central Tendency: Mean Median ModeDocument20 pagesMeasures of Central Tendency: Mean Median ModeRia BarisoNo ratings yet
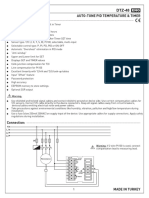
- Auto-Tune Pid Temperature & Timer General Specifications: N L1 L2 L3Document4 pagesAuto-Tune Pid Temperature & Timer General Specifications: N L1 L2 L3sharawany 20No ratings yet
- ORC - Airbag SystemDocument13 pagesORC - Airbag SystemGarikoitz FranciscoeneNo ratings yet
- Strain STREMADocument6 pagesStrain STREMAChavin StormNo ratings yet
- ELEMAGDocument1 pageELEMAGJasper BantulaNo ratings yet
- EJ Mini Lesson #7Document3 pagesEJ Mini Lesson #7ArmandoNo ratings yet
- Gregory, Robert Wayne Et Al. - 'The Role of Artificial Intelligence and Data Network Effects For Creating User Value'Document18 pagesGregory, Robert Wayne Et Al. - 'The Role of Artificial Intelligence and Data Network Effects For Creating User Value'DylanOSullivanNo ratings yet
- IIM Nagpur Test 1 Version 1 2016Document6 pagesIIM Nagpur Test 1 Version 1 2016Saksham GoyalNo ratings yet
- Comparative Study of Steel Structure With and Without Floating Columns in EtabsDocument13 pagesComparative Study of Steel Structure With and Without Floating Columns in EtabsBehroz BehzadNo ratings yet
- Ce2202 - Mechanics of FluidsDocument3 pagesCe2202 - Mechanics of FluidsPrashant GaradNo ratings yet
- Executive Incentives and The Horizon Problem An - 1991 - Journal of AccountingDocument39 pagesExecutive Incentives and The Horizon Problem An - 1991 - Journal of AccountingYuhan JiNo ratings yet
- Lec1 PDFDocument12 pagesLec1 PDFtogarsNo ratings yet
- Surface Mount Multilayer Varistor: SC0805ML - SC2220ML SeriesDocument8 pagesSurface Mount Multilayer Varistor: SC0805ML - SC2220ML SeriesTalebNo ratings yet
- Unit 6 - EarthingDocument26 pagesUnit 6 - Earthinggautam100% (1)
- All Graphs and Charts Available in Show MeDocument16 pagesAll Graphs and Charts Available in Show MeGANGA TAGRANo ratings yet
- Linux NFS and Automounter Administration (Craig Hunt Linux Library)Document0 pagesLinux NFS and Automounter Administration (Craig Hunt Linux Library)Bryan BowmanNo ratings yet
- Physics Lab - Detailed - Answer KeyDocument6 pagesPhysics Lab - Detailed - Answer KeyJasdeepSinghNo ratings yet
- 417 Model E Alarm Check ValvesDocument4 pages417 Model E Alarm Check ValvesM Kumar MarimuthuNo ratings yet
- 5.3.2 To Sketch Graphs of Trigonometric Functions (Part 2) - SPM Additional MathematicsDocument3 pages5.3.2 To Sketch Graphs of Trigonometric Functions (Part 2) - SPM Additional MathematicsLuke SuouNo ratings yet
- 100 TOP Real Time Objective C Multiple Choice Questions and Answers PDF DownloadDocument22 pages100 TOP Real Time Objective C Multiple Choice Questions and Answers PDF DownloadNayan BariNo ratings yet
- 2.data Types Ver2Document56 pages2.data Types Ver2qwernasdNo ratings yet
- Leonardo Romero SR High School: Republic of The Philippines Region Xii - Soccsksargen Schools Division Office of CotabatoDocument4 pagesLeonardo Romero SR High School: Republic of The Philippines Region Xii - Soccsksargen Schools Division Office of CotabatoDulce M. LupaseNo ratings yet