You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Data Structures and Algorithms Made Easy-Narasimha KarumanchiDocument228 pagesData Structures and Algorithms Made Easy-Narasimha KarumanchiPadmalatha Ragu85% (40)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Legal DraftingDocument28 pagesLegal Draftingwadzievj100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- imageRUNNER+ADVANCE+C5051-5045-5035-5030 Parts CatalogDocument268 pagesimageRUNNER+ADVANCE+C5051-5045-5035-5030 Parts CatalogDragos Burlacu100% (1)
- System Description For Use With DESIGO XWORKS 17285 HQ enDocument48 pagesSystem Description For Use With DESIGO XWORKS 17285 HQ enAnonymous US9AFTR02100% (1)
- Standards For Pipes and FittingsDocument11 pagesStandards For Pipes and FittingsMohammed sabatinNo ratings yet
- Coastal Priority Ranking (CPR) Oil Spill Management SoftwareDocument2 pagesCoastal Priority Ranking (CPR) Oil Spill Management SoftwareRedmond R. ShamshiriNo ratings yet
- A Presentation By: Ramin Shamshiri: PH.D Candidate, Ag & Bio Engineering University of FloridaDocument41 pagesA Presentation By: Ramin Shamshiri: PH.D Candidate, Ag & Bio Engineering University of FloridaRedmond R. ShamshiriNo ratings yet
- The Role of Recycle Materials For Sustainable Design of Interior SpacesDocument15 pagesThe Role of Recycle Materials For Sustainable Design of Interior SpacesRedmond R. ShamshiriNo ratings yet
- Machine Learning and Eural EtworkDocument21 pagesMachine Learning and Eural EtworkRedmond R. Shamshiri100% (1)
- Ramin Shamshiri Risk Analysis Exam2 PDFDocument8 pagesRamin Shamshiri Risk Analysis Exam2 PDFRedmond R. ShamshiriNo ratings yet
- Ramin Shamshiri Risk Analysis LectureDocument12 pagesRamin Shamshiri Risk Analysis LectureRedmond R. ShamshiriNo ratings yet
- Ramin Shamshiri Green Computing LectureDocument69 pagesRamin Shamshiri Green Computing LectureRedmond R. ShamshiriNo ratings yet
- STA6166 HW2 Ramin Shamshiri SolutionDocument14 pagesSTA6166 HW2 Ramin Shamshiri SolutionRedmond R. ShamshiriNo ratings yet
- STA6167 Project 3 Ramin Shamshiri SolutionDocument12 pagesSTA6167 Project 3 Ramin Shamshiri SolutionRedmond R. ShamshiriNo ratings yet
- Highschool Math Using Qbasic LanguageDocument9 pagesHighschool Math Using Qbasic LanguageRedmond R. ShamshiriNo ratings yet
- STA6166 HW6 Ramin Shamshiri SolutionDocument18 pagesSTA6166 HW6 Ramin Shamshiri SolutionRedmond R. ShamshiriNo ratings yet
- Ramin - Shamshiri - Lecture - PC-based Design Software in Manufacturing PDFDocument18 pagesRamin - Shamshiri - Lecture - PC-based Design Software in Manufacturing PDFRedmond R. ShamshiriNo ratings yet
- STA6166 HW4 Ramin Shamshiri SolutionDocument15 pagesSTA6166 HW4 Ramin Shamshiri SolutionRedmond R. ShamshiriNo ratings yet
- STA6166 HW1 Ramin Shamshiri SolutionDocument9 pagesSTA6166 HW1 Ramin Shamshiri SolutionRedmond R. ShamshiriNo ratings yet
- STA6167 Project 5 Ramin Shamshiri SolutionDocument8 pagesSTA6167 Project 5 Ramin Shamshiri SolutionRedmond R. ShamshiriNo ratings yet
- STA6166 FinalExam Ramin Shamshiri Part2Document23 pagesSTA6166 FinalExam Ramin Shamshiri Part2Redmond R. ShamshiriNo ratings yet
- STA6167 Project 1 Ramin Shamshiri SolutionDocument11 pagesSTA6167 Project 1 Ramin Shamshiri SolutionRedmond R. ShamshiriNo ratings yet
- STA6167 Project 4 Ramin Shamshiri SolutionDocument17 pagesSTA6167 Project 4 Ramin Shamshiri SolutionRedmond R. ShamshiriNo ratings yet
- Final Exam: STA 6166, Section 8489, Fall 2007Document8 pagesFinal Exam: STA 6166, Section 8489, Fall 2007Redmond R. ShamshiriNo ratings yet
- STA6167 Project 2 Ramin Shamshiri SolutionDocument10 pagesSTA6167 Project 2 Ramin Shamshiri SolutionRedmond R. ShamshiriNo ratings yet
- STA 5325 HW 3 Ramin ShamshiriDocument20 pagesSTA 5325 HW 3 Ramin ShamshiriRedmond R. Shamshiri93% (15)
- STA6126 Ramin Shamshiri Project1Document2 pagesSTA6126 Ramin Shamshiri Project1Redmond R. ShamshiriNo ratings yet
- STA6126 Ramin Shamshiri Project2Document2 pagesSTA6126 Ramin Shamshiri Project2Redmond R. ShamshiriNo ratings yet
- STA5328 Ramin Shamshiri HW3Document6 pagesSTA5328 Ramin Shamshiri HW3Redmond R. ShamshiriNo ratings yet
- STA5328 Test2 Ramin ShamshiriDocument4 pagesSTA5328 Test2 Ramin ShamshiriRedmond R. ShamshiriNo ratings yet
- STA 5325 HW 1 Ramin ShamshiriDocument13 pagesSTA 5325 HW 1 Ramin ShamshiriRedmond R. Shamshiri100% (2)
- Chapter 5Document20 pagesChapter 5Berihu GirmayNo ratings yet
- Funny AcronymsDocument6 pagesFunny AcronymsSachinvirNo ratings yet
- Bruno (2005) Approximating The Bias of The LSDV Estimator For Dynamic Unbalanced Panel Data ModelsDocument6 pagesBruno (2005) Approximating The Bias of The LSDV Estimator For Dynamic Unbalanced Panel Data Modelsvincus27No ratings yet
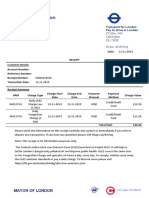
- Transport For London Pay To Drive in London: PO Box 344 Darlington Dl1 9qe TFL - Gov.uk/drivingDocument1 pageTransport For London Pay To Drive in London: PO Box 344 Darlington Dl1 9qe TFL - Gov.uk/drivingDanyy MaciucNo ratings yet
- G6Document14 pagesG6Arinah RdhNo ratings yet
- E Sevai RegistrationDocument18 pagesE Sevai RegistrationSatheesh PNo ratings yet
- Final Lpd1Document6 pagesFinal Lpd1MONIC STRAISAND DIPARINENo ratings yet
- Aircraft Materials and Hardware: (Nuts, Studs, Screws)Document25 pagesAircraft Materials and Hardware: (Nuts, Studs, Screws)PakistaniTalent cover songsNo ratings yet
- Project Report On Design of Road IntersectionDocument15 pagesProject Report On Design of Road IntersectionJohn MalkinNo ratings yet
- To. Whom It May Concern: Available Mentioned Position in IndonesiaDocument8 pagesTo. Whom It May Concern: Available Mentioned Position in IndonesiaGreen Sustain EnergyNo ratings yet
- Case Study: Meera P NairDocument9 pagesCase Study: Meera P Nairnanditha menonNo ratings yet
- Anwar Hossain PDFDocument4 pagesAnwar Hossain PDFnodaw92388No ratings yet
- Which Among The Following Statement Is INCORRECTDocument7 pagesWhich Among The Following Statement Is INCORRECTJyoti SinghNo ratings yet
- Openness and The Market Friendly ApproachDocument27 pagesOpenness and The Market Friendly Approachmirzatouseefahmed100% (2)
- Self-Study Guidance - Basic Accounting. 15 Problems With Detailed Solutions.Document176 pagesSelf-Study Guidance - Basic Accounting. 15 Problems With Detailed Solutions.Martin Teguh WibowoNo ratings yet
- 1654403-1 Press Fit ConnectorsDocument40 pages1654403-1 Press Fit ConnectorsRafael CastroNo ratings yet
- Geography Cba PowerpointDocument10 pagesGeography Cba Powerpointapi-489088076No ratings yet
- Internet Intranet ExtranetDocument28 pagesInternet Intranet ExtranetAmeya Patil100% (1)
- Turn Pet1 Plastic Bottles Into 3d Filament With The Recreator 3d Mk5kit Ender3 b7936987 A5e5 4b10 80fa 8754423f3ee8Document11 pagesTurn Pet1 Plastic Bottles Into 3d Filament With The Recreator 3d Mk5kit Ender3 b7936987 A5e5 4b10 80fa 8754423f3ee8Meet MehtaNo ratings yet
- Market Research and AnalysisDocument5 pagesMarket Research and AnalysisAbdul KarimNo ratings yet
- EU MEA Market Outlook Report 2022Document21 pagesEU MEA Market Outlook Report 2022ahmedNo ratings yet
- SMB Marketing PlaybookDocument18 pagesSMB Marketing PlaybookpramodharithNo ratings yet
- Ibps Po Mains Model Question Paper PDF Set 2Document92 pagesIbps Po Mains Model Question Paper PDF Set 2DHIRAJNo ratings yet
- Abhijit Auditorium Elective Sem 09Document3 pagesAbhijit Auditorium Elective Sem 09Abhijit Kumar AroraNo ratings yet
- ICICIdirect Model Portfolio ProductDocument54 pagesICICIdirect Model Portfolio ProductPrerna GillNo ratings yet