You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- CE 412-511 Assignment F2Document2 pagesCE 412-511 Assignment F2hailooNo ratings yet
- Hart-Smith Design Methodology For Bonded-Bolted Composite Joints - A117342Document97 pagesHart-Smith Design Methodology For Bonded-Bolted Composite Joints - A117342Anonymous 1rLNlqUNo ratings yet
- Mechanical Vibration Solved ExamplesDocument84 pagesMechanical Vibration Solved ExamplesKajal Khan100% (2)
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 33Document27 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 33Kajal KhanNo ratings yet
- Ihesiulor Obinna ThesisDocument172 pagesIhesiulor Obinna ThesisPayel DuttaNo ratings yet
- Vibration AnalysisDocument8 pagesVibration AnalysisKajal KhanNo ratings yet
- Topics Page No. 2. Failure in Composites 2.1 Failure MechanismDocument1 pageTopics Page No. 2. Failure in Composites 2.1 Failure MechanismKajal KhanNo ratings yet
- Off Middepth ForwardDocument2 pagesOff Middepth ForwardKajal KhanNo ratings yet
- ME755: Assignment 3:, ν, ν a is subjected to far-field load σDocument1 pageME755: Assignment 3:, ν, ν a is subjected to far-field load σKajal KhanNo ratings yet
- Sheet08 (Provisional) - Development of SurfacesDocument3 pagesSheet08 (Provisional) - Development of SurfacesKajal KhanNo ratings yet
- Latex GuideDocument109 pagesLatex GuidePawan PareekNo ratings yet
- Lecture08-Development of SurfacesDocument57 pagesLecture08-Development of SurfacesKajal KhanNo ratings yet
- Strain Analysis in MEMS/NEMS Structures and Devices by Using Focused Ion Beam SystemDocument6 pagesStrain Analysis in MEMS/NEMS Structures and Devices by Using Focused Ion Beam SystemKajal KhanNo ratings yet
- Lecture07-Sections of SolidsDocument95 pagesLecture07-Sections of SolidsKajal KhanNo ratings yet
- Section Modulus & Stress Calculation of Rail SectionDocument13 pagesSection Modulus & Stress Calculation of Rail SectionfiemsabyasachiNo ratings yet
- Basic of Axial StrainDocument3 pagesBasic of Axial StrainAjayNo ratings yet
- PHD Thesis - Ruta Ireng WicaksonoDocument2 pagesPHD Thesis - Ruta Ireng WicaksonoRuta Ireng WicaksonoNo ratings yet
- Rak-50 3149 L. l12 - Hardening Soil Model PDFDocument111 pagesRak-50 3149 L. l12 - Hardening Soil Model PDFMinhLêNo ratings yet
- Explicit Dynamics Chapter 9 Material ModelsDocument54 pagesExplicit Dynamics Chapter 9 Material ModelsAnonymous 0tqzNTWyyNo ratings yet
- Somom PDFDocument429 pagesSomom PDFChandan ChawanNo ratings yet
- Advance Soil Mechanics: Elastic, Plastic and Elasto-Plastic BehaviourDocument52 pagesAdvance Soil Mechanics: Elastic, Plastic and Elasto-Plastic BehaviourzuluagagaNo ratings yet
- AbstractDocument5 pagesAbstractkanzNo ratings yet
- Mancolany PDFDocument24 pagesMancolany PDFjacs127No ratings yet
- Ekeeda - Mechanical Engineering - Strength of MaterialsDocument11 pagesEkeeda - Mechanical Engineering - Strength of MaterialsMANISH KUMARNo ratings yet
- Equilibrium and Elasticity: Powerpoint Lectures ForDocument16 pagesEquilibrium and Elasticity: Powerpoint Lectures FordeeparNo ratings yet
- Chap 3Document63 pagesChap 3Muhamad AsvarNo ratings yet
- Estimate FormworksDocument2 pagesEstimate FormworksMarvin Gan GallosNo ratings yet
- Lab 2 Mekanik MaterialDocument14 pagesLab 2 Mekanik MaterialJohn TuahNo ratings yet
- Stiffness Predictions For Unidirectional Short-Fiber Composites Review and EvaluationDocument17 pagesStiffness Predictions For Unidirectional Short-Fiber Composites Review and EvaluationJérémy CrevelNo ratings yet
- A Design Model For Geosynthetic - Reinforced PavementsDocument17 pagesA Design Model For Geosynthetic - Reinforced PavementsRonald MaraviNo ratings yet
- Objective Questions in Engineering MechanicsDocument6 pagesObjective Questions in Engineering MechanicsrajkumardotcomNo ratings yet
- Elastic Modulus MeasurementDocument4 pagesElastic Modulus Measurementcal2_uniNo ratings yet
- 08 CH-1 1.7 Elastic ConstantsDocument31 pages08 CH-1 1.7 Elastic ConstantsTooling ganesh100% (2)
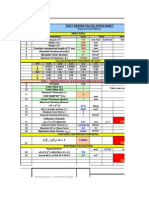
- Duct Design Calculation Sheet: Note:-Take the Value of α & β from above table use in the calculationDocument9 pagesDuct Design Calculation Sheet: Note:-Take the Value of α & β from above table use in the calculationchagar_harshNo ratings yet
- Info Rock Subgrade ReactionDocument3 pagesInfo Rock Subgrade ReactionIngeniero EstructuralNo ratings yet
- TheFocus 55 PDFDocument7 pagesTheFocus 55 PDFYousefNo ratings yet
- Eurocode Section Tables - Selected Sections0Document23 pagesEurocode Section Tables - Selected Sections0Kenaia Adeleye100% (2)
- Universal Columns2Document2 pagesUniversal Columns2denyfateNo ratings yet
- Experiment 1: Young's ModulusDocument18 pagesExperiment 1: Young's ModulusSepi Itu IndahNo ratings yet
- Soil Modulus and Undrained Cohesion of Clayey Soils From Stress-Strain ModelsDocument10 pagesSoil Modulus and Undrained Cohesion of Clayey Soils From Stress-Strain ModelsTerry CheungNo ratings yet