You might also like
- Rohm Lathe ChucksDocument91 pagesRohm Lathe ChucksNebojša ObradovićNo ratings yet
- Servo Valve Coloring BookDocument18 pagesServo Valve Coloring BooksaikatmeNo ratings yet
- High Precision Position Control of Electro-Hydraulic Servo SystemDocument10 pagesHigh Precision Position Control of Electro-Hydraulic Servo Systemamin342No ratings yet
- Festo Solenoid Valve model MFH โซลินอยด์วาล์วเฟสโต้Document66 pagesFesto Solenoid Valve model MFH โซลินอยด์วาล์วเฟสโต้Parinpa Ketar100% (1)
- Module - Time Delay ValveDocument9 pagesModule - Time Delay ValvescribdNo ratings yet
- Moog New Tb117Document24 pagesMoog New Tb117Hammad Ali Zaman100% (1)
- Hydraulic System:-: Chapter-2 Hydraulic, Pneumatic and Electrical Telemetry SystemsDocument7 pagesHydraulic System:-: Chapter-2 Hydraulic, Pneumatic and Electrical Telemetry SystemsMayur ParmarNo ratings yet
- Proportional Control For Set Point Change (Servo Problem) Proportional Control For Load Change (Regulatory Problem)Document19 pagesProportional Control For Set Point Change (Servo Problem) Proportional Control For Load Change (Regulatory Problem)Imran UnarNo ratings yet
- Neutral Position in DCVDocument6 pagesNeutral Position in DCVAimee SpearsNo ratings yet
- Air Line Equipment: For Quality Compressed AirDocument114 pagesAir Line Equipment: For Quality Compressed AirCastañeda ValeriaNo ratings yet
- 7 Hydraulic Circuit DesignDocument10 pages7 Hydraulic Circuit Designyohannis muluNo ratings yet
- Me8694 - Hydraulics and Pneumatics: Arulprakasam G Assistant Professor Dept - Of.mech - Engg., Kit-CbeDocument12 pagesMe8694 - Hydraulics and Pneumatics: Arulprakasam G Assistant Professor Dept - Of.mech - Engg., Kit-CbeArul Prakasam GNo ratings yet
- TRAINING MANUAL PNEUMATICS PROJECT EXERCISESDocument17 pagesTRAINING MANUAL PNEUMATICS PROJECT EXERCISESSriram SastryNo ratings yet
- Linear Hydraulic CircuitsDocument11 pagesLinear Hydraulic CircuitsBetileno QuadAlexNo ratings yet
- 99 Examples Pneumatic Applications PDFDocument120 pages99 Examples Pneumatic Applications PDFAndres RodriguezNo ratings yet
- Hydraulic CylinderDocument40 pagesHydraulic CylinderYandapalli Sai ramNo ratings yet
- Basic Pneumatic and Electro Pneumatics Working Principle - Free Ebooks DownloadDocument7 pagesBasic Pneumatic and Electro Pneumatics Working Principle - Free Ebooks Downloadmeckup1230% (2)
- 3 - Hydraulic System DesignDocument33 pages3 - Hydraulic System DesignAbere GetachewNo ratings yet
- Manually and Mechanically Actuated Directional Control Valves Sturdy and Reliable!Document66 pagesManually and Mechanically Actuated Directional Control Valves Sturdy and Reliable!lojzemulec5966No ratings yet
- 6458 - 01-General Waste Truck ConfigurationDocument12 pages6458 - 01-General Waste Truck ConfigurationBernard ShuenNo ratings yet
- Fluid Power Symbols GuideDocument4 pagesFluid Power Symbols GuideJay RoxNo ratings yet
- Hydraulic Circuits and ApplicationsDocument20 pagesHydraulic Circuits and ApplicationsLalola HahohaNo ratings yet
- Hydraulic Commissioning ManualDocument7 pagesHydraulic Commissioning Manualranjit2150No ratings yet
- L-6 Hydraulic Circuit Design & AnalysisDocument34 pagesL-6 Hydraulic Circuit Design & AnalysisMentsnot GetuNo ratings yet
- Iso Hydraulic Assembly ProcedureDocument9 pagesIso Hydraulic Assembly ProcedureV_SanthanakrishnanNo ratings yet
- Telescopic Boom Force AnalysisDocument4 pagesTelescopic Boom Force AnalysisLoc NguyenNo ratings yet
- Hysteresis Reduction in Hydraulic Proportional Valve ControlDocument58 pagesHysteresis Reduction in Hydraulic Proportional Valve Controlkme100% (1)
- Directional Control Valves GuideDocument193 pagesDirectional Control Valves GuidephaindikaNo ratings yet
- Basic Pneumatic Examen PDFDocument34 pagesBasic Pneumatic Examen PDFRosalino Leonides Martinez Marquez100% (1)
- Bomba Pratissoli MSDocument20 pagesBomba Pratissoli MSAlliin Urbina100% (1)
- Moog Hydraulic Servo Valve Construction Plus Moog PDFDocument13 pagesMoog Hydraulic Servo Valve Construction Plus Moog PDFJean DesingermainNo ratings yet
- Stair Treads - Guidance For Industrial Use: BS/EN ISO 14122-1,2,3Document2 pagesStair Treads - Guidance For Industrial Use: BS/EN ISO 14122-1,2,3jinyuan74No ratings yet
- Hydraulic Cartridge Logic Valves - Hydraulic ValveDocument2 pagesHydraulic Cartridge Logic Valves - Hydraulic Valveasif bashaNo ratings yet
- Fluid power books collectionDocument2 pagesFluid power books collectionAmitabhaNo ratings yet
- Robotic Sensors: Robot Actuators - Different TypesDocument4 pagesRobotic Sensors: Robot Actuators - Different Typesmohan_rapaka100% (1)
- Bul 36115 Servo Valve OperationDocument12 pagesBul 36115 Servo Valve Operationrikkitech100% (1)
- Unbalanced Vane Pump Design ExplainedDocument5 pagesUnbalanced Vane Pump Design ExplainedRaghu KrishnanNo ratings yet
- SKF High Performance Actuator CatalogueDocument264 pagesSKF High Performance Actuator CatalogueHector Maldonado100% (1)
- Datasheet VT Modular enDocument52 pagesDatasheet VT Modular enTimon2005No ratings yet
- AMEE310 Lab5Document12 pagesAMEE310 Lab5tsunaseetNo ratings yet
- SimHydraulics-User S Guide PDFDocument64 pagesSimHydraulics-User S Guide PDFHéctor Ramiro Pérez RodríguezNo ratings yet
- MOOG - JRA1 Actuation at MoogDocument32 pagesMOOG - JRA1 Actuation at MoogBazlur Rahman SohelNo ratings yet
- Electro-Hydraulics, Basic LevelDocument202 pagesElectro-Hydraulics, Basic Levelreza-ab100% (1)
- Simrit 03 - Hydraulics (Technical Manual 2007)Document312 pagesSimrit 03 - Hydraulics (Technical Manual 2007)jo_rz_57No ratings yet
- Hydraulics Basic LevelDocument14 pagesHydraulics Basic LevelIndhusekaran NatarajanNo ratings yet
- Session 12 en Logic Element-Cartridge Valve NoRestrictionDocument5 pagesSession 12 en Logic Element-Cartridge Valve NoRestrictionahmed elkhoulyNo ratings yet
- Pneumatic Note UNIT 4Document12 pagesPneumatic Note UNIT 4Syazrin Aklili Ab RahmanNo ratings yet
- Electro Hydraulic Servo ValveDocument8 pagesElectro Hydraulic Servo ValveabyzenNo ratings yet
- Fluid Power Learning ObjectivesDocument40 pagesFluid Power Learning ObjectivesbmdbmdbmdNo ratings yet
- Pneumatic ViseDocument18 pagesPneumatic ViseSaravanan SaranNo ratings yet
- HPS Notes of Lecture PDFDocument63 pagesHPS Notes of Lecture PDFsbhalesh100% (2)
- Metal Valves & Pipe Fittings World Summary: Market Values & Financials by CountryFrom EverandMetal Valves & Pipe Fittings World Summary: Market Values & Financials by CountryNo ratings yet
- Lab Manual MechatronicsDocument50 pagesLab Manual MechatronicsBala ChandarNo ratings yet
- Seminar ProjectDocument30 pagesSeminar ProjectANWAR MOHAMMEDNo ratings yet
- Study of Automatic Transmission Based On Electronic Control SystemDocument10 pagesStudy of Automatic Transmission Based On Electronic Control SystemHusseenNo ratings yet
- Employing Analogue and Digital Solenoid Hydraulic Valves in Position Control SystemDocument18 pagesEmploying Analogue and Digital Solenoid Hydraulic Valves in Position Control SystemKadi KadiroNo ratings yet
- Motion Control of An Aircraft Electro-Hydraulic SeDocument12 pagesMotion Control of An Aircraft Electro-Hydraulic SeZyad KaramNo ratings yet
- Kavita 0404Document3 pagesKavita 0404sunfacevelNo ratings yet
- Neural Network Optimizes Pneumatic Position ControlDocument9 pagesNeural Network Optimizes Pneumatic Position ControlAri NugrohoNo ratings yet
- Ica20110200001 94894672Document8 pagesIca20110200001 94894672Anggara T NugrahaNo ratings yet
- Application of Linear Model Predictive Control and Input-Output Linearization To Constrained Control of 3D Cable RobotsDocument8 pagesApplication of Linear Model Predictive Control and Input-Output Linearization To Constrained Control of 3D Cable Robotsamin342No ratings yet
- Combining State-Dependent Riccati Equation (SDRE) Methods With Model Predictive Neural Control (MPNC) PDFDocument7 pagesCombining State-Dependent Riccati Equation (SDRE) Methods With Model Predictive Neural Control (MPNC) PDFamin342No ratings yet
- Model For Calculating Steam Ejector PerformanceDocument15 pagesModel For Calculating Steam Ejector PerformanceMuhammad KhurramNo ratings yet
- Metrological Recording of Deformation Development - HBM PDFDocument9 pagesMetrological Recording of Deformation Development - HBM PDFamin342No ratings yet
- Digital ProjectDocument42 pagesDigital Projectamin342No ratings yet
- 1978 - Edible Oil DeodorizationDocument9 pages1978 - Edible Oil Deodorizationamin342100% (1)
- EjectorsDocument7 pagesEjectorsashirwad shetty50% (2)
- Removing Si02 Particles with an Ejector Venturi ScrubberDocument5 pagesRemoving Si02 Particles with an Ejector Venturi Scrubberamin342100% (1)
- 2000 - Calibration of Displacement Sensors Up To 300um With Nanometre Accuracy and Direct Traceability To A Primary Standard of LengthDocument9 pages2000 - Calibration of Displacement Sensors Up To 300um With Nanometre Accuracy and Direct Traceability To A Primary Standard of Lengthamin342No ratings yet
- 1938 - Continuous Deodorization of Edible OilsDocument3 pages1938 - Continuous Deodorization of Edible Oilsamin342100% (1)
- ISA Transactions: T. Bouarar, K. Guelton, N. ManamanniDocument15 pagesISA Transactions: T. Bouarar, K. Guelton, N. Manamanniamin342No ratings yet
- Application of Self-Tuning Fuzzy Pid Controller On Industrial Hydraulic ActuatorDocument16 pagesApplication of Self-Tuning Fuzzy Pid Controller On Industrial Hydraulic Actuatoramin342No ratings yet
- Fuzzy Control Systems Design and AnalysisDocument309 pagesFuzzy Control Systems Design and AnalysissayedmhNo ratings yet
- Synchronization Motion Control For Quad-Cylinder Lift Systems With Acceleration CouplingDocument6 pagesSynchronization Motion Control For Quad-Cylinder Lift Systems With Acceleration Couplingamin342No ratings yet
- 06dec VonheederDocument140 pages06dec Vonheederamin342No ratings yet
- Determination of A Synchronous Generator Characteristics Via Finite Element AnalysisDocument6 pagesDetermination of A Synchronous Generator Characteristics Via Finite Element Analysisamin342No ratings yet
- HpdeDocument18 pagesHpdeamin342No ratings yet
- A Finite Element Method TutorialDocument37 pagesA Finite Element Method TutorialKang QinNo ratings yet
- Ed 1420 PDFDocument3 pagesEd 1420 PDFsapiencecorp100% (1)
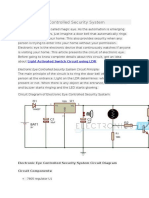
- Electronic EyeDocument4 pagesElectronic EyeSachinNo ratings yet
- Annexure - I Syllabi For The Entrance TestDocument25 pagesAnnexure - I Syllabi For The Entrance Testaarthi munuswamyNo ratings yet
- Electronic A Digital Integrated Circuits - M.C. SharmaDocument116 pagesElectronic A Digital Integrated Circuits - M.C. SharmaEnya Andrea Ribba Hernandez100% (1)
- Double Tail ComparatorDocument32 pagesDouble Tail ComparatormdlogicsolutionsNo ratings yet
- Ec 1 FinalDocument6 pagesEc 1 FinalRaushan RaazNo ratings yet
- Electronics Minor Project Metro Train PrototypeDocument84 pagesElectronics Minor Project Metro Train PrototypeHemant93% (44)
- Senior Project Final ReportDocument16 pagesSenior Project Final ReportmindedoneNo ratings yet
- 3.unit 01Document73 pages3.unit 01sanjayNo ratings yet
- XC9404Document16 pagesXC9404Anonymous TPVfFif6TONo ratings yet
- Add Finisher Tray-A1-SmDocument38 pagesAdd Finisher Tray-A1-SmZlatko OžanićNo ratings yet
- I-V Characteristic of Diode Lab ReportDocument6 pagesI-V Characteristic of Diode Lab ReportSR NibirNo ratings yet
- Applied Electronics and InstrumentationDocument192 pagesApplied Electronics and InstrumentationSHINUMMNo ratings yet
- HLAB1Document27 pagesHLAB1SenseiNo ratings yet
- Capacitive ReactanceDocument46 pagesCapacitive Reactancecrazy about readingNo ratings yet
- Fig.1 Block Diagram of TransmitterDocument5 pagesFig.1 Block Diagram of TransmitterKranthi KumarNo ratings yet
- Chap1 Intro Digital SystemDocument29 pagesChap1 Intro Digital SystemKhaiRul NiZam AnuarNo ratings yet
- RFID Based Shopping Trolley Project ReportDocument40 pagesRFID Based Shopping Trolley Project ReportAnonymous L9fB0XU100% (1)
- Conmed System 5000 ESU - Service ManualDocument73 pagesConmed System 5000 ESU - Service ManualImam Hidayat100% (1)
- Expt 4 Truth Table Verification of Logic GatesDocument5 pagesExpt 4 Truth Table Verification of Logic GatesSwapnil Babele100% (1)
- FM Transmitter: Design Report Project Team: Dec06-01 ClientDocument37 pagesFM Transmitter: Design Report Project Team: Dec06-01 ClientRon Kirby Magdae CalabonNo ratings yet
- Led TV: Service ManualDocument32 pagesLed TV: Service ManualRuy MirandaNo ratings yet
- 7led DiceDocument8 pages7led DiceMthokozisi Jet NgcoboNo ratings yet
- Manual HC 10 ServicioDocument69 pagesManual HC 10 Servicioernesto Arteaga80% (5)
- WS2812B LED DatasheetDocument10 pagesWS2812B LED DatasheetMyrdhinbzhNo ratings yet
- 1 1 7 A Datasheets CompleteDocument4 pages1 1 7 A Datasheets Completeapi-276948567100% (2)
- Viper 1000Document39 pagesViper 1000Pipe Erre AcheceNo ratings yet
- II B.Tech. I Semester Regular Examinations QuestionsDocument8 pagesII B.Tech. I Semester Regular Examinations QuestionsToaster97No ratings yet
- 2 DGS WITHOUT SYNCHRONIZATION CONTROLDocument7 pages2 DGS WITHOUT SYNCHRONIZATION CONTROLntrimurthuluNo ratings yet
- Data Sheet: HFBR-0508Z Series HFBR-1528Z Transmitter HFBR-2528Z ReceiverDocument7 pagesData Sheet: HFBR-0508Z Series HFBR-1528Z Transmitter HFBR-2528Z ReceiverCharoon SuriyawichitwongNo ratings yet