You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Liebherr PR 712 Litronic Final DrivesDocument8 pagesLiebherr PR 712 Litronic Final DrivesLiebherr75% (4)
- Capital Structure UploadDocument17 pagesCapital Structure UploadLakshmi Harshitha mNo ratings yet
- A Child With Fever and Hemorrhagic RashDocument3 pagesA Child With Fever and Hemorrhagic RashCynthia GNo ratings yet
- Healthy Body CompositionDocument18 pagesHealthy Body CompositionSDasdaDsadsaNo ratings yet
- Archaeology - October 2016 PDFDocument72 pagesArchaeology - October 2016 PDFOmer CetinkayaNo ratings yet
- Elaborare Modele de Rating in Conformitate Cu IFRS 9Document8 pagesElaborare Modele de Rating in Conformitate Cu IFRS 9MstefNo ratings yet
- Hot and Cold TherapyDocument24 pagesHot and Cold TherapyJo Obs100% (1)
- Questions 1Document3 pagesQuestions 1krp_212003No ratings yet
- CongressWatch #197: RA 1337-Innovative Startup ActDocument1 pageCongressWatch #197: RA 1337-Innovative Startup ActMakati Business ClubNo ratings yet
- Blaine Ray HandoutDocument24 pagesBlaine Ray Handoutaquilesanchez100% (1)
- Consumer Perception Towards WhatsappDocument72 pagesConsumer Perception Towards WhatsappRaj KumarNo ratings yet
- FPI - Study Permit Application GuideDocument9 pagesFPI - Study Permit Application GuideKian Mark DarioNo ratings yet
- Gynaecology Thesis TopicsDocument7 pagesGynaecology Thesis TopicsDawn Cook100% (2)
- Handout No. 03 - Purchase TransactionsDocument4 pagesHandout No. 03 - Purchase TransactionsApril SasamNo ratings yet
- D904 - D906 - D914 - D916 - D924 - D926 - 8718458 - 04092008 - v02 - enDocument218 pagesD904 - D906 - D914 - D916 - D924 - D926 - 8718458 - 04092008 - v02 - enАлексей89% (18)
- Former Rajya Sabha MP Ajay Sancheti Appeals Finance Minister To Create New Laws To Regulate Cryptocurrency MarketDocument3 pagesFormer Rajya Sabha MP Ajay Sancheti Appeals Finance Minister To Create New Laws To Regulate Cryptocurrency MarketNation NextNo ratings yet
- Arithmetic Mean PDFDocument29 pagesArithmetic Mean PDFDivya Gothi100% (1)
- Chinese MedicineDocument16 pagesChinese MedicineTrisNo ratings yet
- Bleeding Disorders in Pregnancy: Table 1Document7 pagesBleeding Disorders in Pregnancy: Table 1KharismaNisaNo ratings yet
- M 3 Nceog 2Document110 pagesM 3 Nceog 2Bharti SinghalNo ratings yet
- Satellite Value Chain: Snapshot 2017Document13 pagesSatellite Value Chain: Snapshot 2017syrijal26No ratings yet
- Tle10 Cookery DLL Q1-Week1 Sy2022-2023Document4 pagesTle10 Cookery DLL Q1-Week1 Sy2022-2023Edmar S AguilarNo ratings yet
- University of Dar Es Salaam: Faculty of Commerce and ManagementDocument37 pagesUniversity of Dar Es Salaam: Faculty of Commerce and ManagementEric MitegoNo ratings yet
- Task 4 - Illustrating Psychoanalytic CriticismDocument9 pagesTask 4 - Illustrating Psychoanalytic CriticismTroJaf OfficialNo ratings yet
- Symantec Endpoint Protection 14.3 RU3 Release NotesDocument28 pagesSymantec Endpoint Protection 14.3 RU3 Release NotesMilind KuleNo ratings yet
- Egalitarianism As UK: Source: Hofstede Insights, 2021Document4 pagesEgalitarianism As UK: Source: Hofstede Insights, 2021kamalpreet kaurNo ratings yet
- CERADocument10 pagesCERAKeren Margarette AlcantaraNo ratings yet
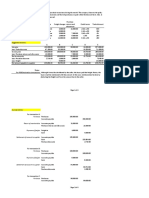
- ABM 221-Examples (ALL UNITS)Document10 pagesABM 221-Examples (ALL UNITS)Bonface NsapatoNo ratings yet
- VisualizationDocument2 pagesVisualizationKIRAN H SNo ratings yet
- E-Catalog 2021 Jan JMI Dan KimDocument52 pagesE-Catalog 2021 Jan JMI Dan KimbobNo ratings yet