You might also like
- 6 ReferencesDocument17 pages6 ReferencesVenkata ReddyNo ratings yet
- Table 3.2 Optimum Weight Comparison of Steel MRFs Using ELF Procedure and Nonlinear Time History Analysis With Interior Penalty Function MethodDocument4 pagesTable 3.2 Optimum Weight Comparison of Steel MRFs Using ELF Procedure and Nonlinear Time History Analysis With Interior Penalty Function MethodVenkata ReddyNo ratings yet
- Beams LayoutDocument1 pageBeams LayoutVenkata ReddyNo ratings yet
- Opimum Design of Steel Buckling Restrained Braced Frames Under Seismic ExcitationDocument15 pagesOpimum Design of Steel Buckling Restrained Braced Frames Under Seismic ExcitationVenkata ReddyNo ratings yet
- 308 92Document11 pages308 92s8811No ratings yet
- Beam ReinforcementDocument1 pageBeam ReinforcementVenkata ReddyNo ratings yet
- Slab DetailsDocument1 pageSlab DetailsVenkata ReddyNo ratings yet
- Drift Vs Storey Numbers For 6BRBF Using NTH AnalysisDocument1 pageDrift Vs Storey Numbers For 6BRBF Using NTH AnalysisVenkata ReddyNo ratings yet
- Steel Buckling Restrained Braced Frames Under SEISMIC EXCITATION" Submitted by Sri. B. Venkata Reddy inDocument8 pagesSteel Buckling Restrained Braced Frames Under SEISMIC EXCITATION" Submitted by Sri. B. Venkata Reddy inVenkata ReddyNo ratings yet
- Current Bill JanDocument1 pageCurrent Bill JanVenkata ReddyNo ratings yet
- Main MDocument1 pageMain MVenkata ReddyNo ratings yet
- Appendix ADocument19 pagesAppendix AVenkata ReddyNo ratings yet
- Optimal Seismic Design of Steel Moment Frames Using IPF AlgorithmDocument9 pagesOptimal Seismic Design of Steel Moment Frames Using IPF AlgorithmVenkata ReddyNo ratings yet
- Chapter 4Document4 pagesChapter 4Venkata ReddyNo ratings yet
- Main MDocument1 pageMain MVenkata ReddyNo ratings yet
- Chemical Composition of Structural SteelsDocument3 pagesChemical Composition of Structural SteelsVenkata ReddyNo ratings yet
- Appendix ADocument22 pagesAppendix AVenkata ReddyNo ratings yet
- ReferencesDocument3 pagesReferencesVenkata ReddyNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Modelling of Subcooled Flow Boiling Heat Transfer of Water Through A Vertical Heated PipeDocument4 pagesModelling of Subcooled Flow Boiling Heat Transfer of Water Through A Vertical Heated PipeDr Mohammed AzharNo ratings yet
- EP-MS-P4-S3-075 - 11kV Heat Shrinkable Cable Terminations - KM Material..Document14 pagesEP-MS-P4-S3-075 - 11kV Heat Shrinkable Cable Terminations - KM Material..dimaomarNo ratings yet
- Electronic Fuel Injection: Basic System PartsDocument4 pagesElectronic Fuel Injection: Basic System PartsSantosh TrimbakeNo ratings yet
- A Paper by Professor Geoff Duffy: Climate Emergency!! Where?Document4 pagesA Paper by Professor Geoff Duffy: Climate Emergency!! Where?Juana AtkinsNo ratings yet
- Chiller T&C ProcedureDocument11 pagesChiller T&C ProcedureOanh NguyenNo ratings yet
- Electronic Devices and CircuitsDocument2 pagesElectronic Devices and CircuitsKing AshokNo ratings yet
- Extending Beyond The Max Common-Mode Range of Discrete Current-Sense AmplifiersDocument3 pagesExtending Beyond The Max Common-Mode Range of Discrete Current-Sense AmplifiersRoland VladutescuNo ratings yet
- Machinery Breakdown InsuranceDocument20 pagesMachinery Breakdown InsuranceRumman Arshad DarNo ratings yet
- Complete Note On Solar Panel InstallationDocument3 pagesComplete Note On Solar Panel InstallationtowfiqeeeNo ratings yet
- CEN 01/2018 (Assistant Loco Pilot (ALP) & Technicians) RRB: BhopalDocument2 pagesCEN 01/2018 (Assistant Loco Pilot (ALP) & Technicians) RRB: Bhopalsaurabh kumarNo ratings yet
- MK6 Golf GTI Wiring Diagrams & Component Locations PDFDocument1,165 pagesMK6 Golf GTI Wiring Diagrams & Component Locations PDFMorarescu Andrei100% (5)
- Run-Up Test: FI-37240 Linnavuori, Nokia FinlandDocument4 pagesRun-Up Test: FI-37240 Linnavuori, Nokia FinlandGaston SosaNo ratings yet
- LCCF Book Version 2 2017Document116 pagesLCCF Book Version 2 2017IkhwanNo ratings yet
- ESR-Suctionpot AssemblyDocument10 pagesESR-Suctionpot Assemblybmanojkumar16No ratings yet
- Iesco Online Billl-March 17Document1 pageIesco Online Billl-March 17Muhammad Asif HussainNo ratings yet
- Clear Writing Style - An Introduction To The Craft of Argument by Joseph M WilliamsDocument39 pagesClear Writing Style - An Introduction To The Craft of Argument by Joseph M WilliamsBrian Johnson100% (1)
- PLC-controlled Stepper Motor Drive For NC PositionDocument10 pagesPLC-controlled Stepper Motor Drive For NC PositiondeoarshiNo ratings yet
- Ultrasonic Gas Metering Skid SpecificationDocument38 pagesUltrasonic Gas Metering Skid Specificationer_bhavin3119100% (1)
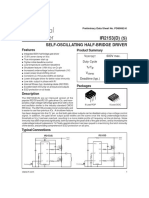
- Self-Oscillating Half-Bridge Driver Preliminary Data SheetDocument9 pagesSelf-Oscillating Half-Bridge Driver Preliminary Data Sheetamijoski6051No ratings yet
- Kittel Solutions AKDocument79 pagesKittel Solutions AKAra Martínez-Olguín100% (5)
- Head Loss Lab ReportDocument15 pagesHead Loss Lab ReportMajak MarialNo ratings yet
- Modularization in Chemical Processing: Special Section: Process IntensificationDocument9 pagesModularization in Chemical Processing: Special Section: Process IntensificationJohn AnthoniNo ratings yet
- BOQ - SIPIL GI 150 KV RAJAPAKSIDocument14 pagesBOQ - SIPIL GI 150 KV RAJAPAKSIReinhard Jesaya SimbolonNo ratings yet
- IRA-4SS Automatic Insertion Instrument Regulator: Engineering CompanyDocument2 pagesIRA-4SS Automatic Insertion Instrument Regulator: Engineering CompanyRuben Ortiz CaramNo ratings yet
- FluorineDocument13 pagesFluorineAndrei MatusaNo ratings yet
- Cmai c4 Gofer AsiaDocument5 pagesCmai c4 Gofer AsiacheemokNo ratings yet
- Fenner Flexible Gear Couplings Transmit PowerDocument4 pagesFenner Flexible Gear Couplings Transmit Powerren kaiNo ratings yet
- 2009 PI Piezo Actuators Components Nano Positioning CatalogDocument48 pages2009 PI Piezo Actuators Components Nano Positioning CatalogburakbalciNo ratings yet
- ClassNK - MEPC80 SummaryDocument5 pagesClassNK - MEPC80 SummaryPereira JenNo ratings yet
- Midea CAC Aqua Tempo Super II Series (DC Inverter Air-Cooled Chiller)Document5 pagesMidea CAC Aqua Tempo Super II Series (DC Inverter Air-Cooled Chiller)ikac3No ratings yet