You might also like
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- Vibration of Two Degree of Freedom SystemDocument23 pagesVibration of Two Degree of Freedom SystemDewa Ayu Mery AgustinNo ratings yet
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Chapter 13 Multidegree of Freedom Systems: M K Are Mass and Stiffness Matrix Respectfully. Premultiplying MDocument15 pagesChapter 13 Multidegree of Freedom Systems: M K Are Mass and Stiffness Matrix Respectfully. Premultiplying Mkaruna141990No ratings yet
- ENGR 6925: Automatic Control Engineering Supplementary Notes On ModellingDocument31 pagesENGR 6925: Automatic Control Engineering Supplementary Notes On ModellingTharakaKaushalyaNo ratings yet
- Mathematical Modeling of Mechanical Systems and Electrical SystemsDocument49 pagesMathematical Modeling of Mechanical Systems and Electrical SystemsMary DunhamNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- A Sufficient Condition For Entrainment of A Van-der-Pol Oscillator Resistively Coupled To A Fixed Voltage InputDocument8 pagesA Sufficient Condition For Entrainment of A Van-der-Pol Oscillator Resistively Coupled To A Fixed Voltage InputmalaysiatotoNo ratings yet
- Chapter 1Document8 pagesChapter 1hitesh89No ratings yet
- Quantum Mechanics II - Homework 2Document6 pagesQuantum Mechanics II - Homework 2Ale GomezNo ratings yet
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)From EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)No ratings yet
- Mathematics For Economics (Implicit Function Theorm)Document10 pagesMathematics For Economics (Implicit Function Theorm)ARUPARNA MAITYNo ratings yet
- Part IB Paper 6: Information Engineering Linear Systems and Control Glenn VinnicombeDocument18 pagesPart IB Paper 6: Information Engineering Linear Systems and Control Glenn Vinnicombeaali1915No ratings yet
- EigenvaluesDocument6 pagesEigenvaluesAnonymous 7oXNA46xiNNo ratings yet
- QM1 Problem Set 1 Solutions - Mike SaelimDocument5 pagesQM1 Problem Set 1 Solutions - Mike SaelimryzesyaaNo ratings yet
- Adv Lab OscillatorsDocument12 pagesAdv Lab OscillatorsPeter John BolgertNo ratings yet
- X IR T TDocument8 pagesX IR T TgiantsssNo ratings yet
- Behaviour of Nonlinear SystemsDocument11 pagesBehaviour of Nonlinear SystemsCheenu SinghNo ratings yet
- λ ax ∂ h hx ∂ α (log α) x ∂Document2 pagesλ ax ∂ h hx ∂ α (log α) x ∂JFSPNo ratings yet
- Implementation of Digital FiltersDocument15 pagesImplementation of Digital Filtersdivya1587No ratings yet
- Lecture 1 Notes Contracts: 15-122: Principles of Imperative Computation (Summer 1 2015) Frank PfenningDocument28 pagesLecture 1 Notes Contracts: 15-122: Principles of Imperative Computation (Summer 1 2015) Frank PfenningSebastienNo ratings yet
- OU Open University SM358 2009 Exam SolutionsDocument23 pagesOU Open University SM358 2009 Exam Solutionssam smithNo ratings yet
- Linear SystemsDocument44 pagesLinear SystemsrajuvadlakondaNo ratings yet
- Classnotes For Classical Control Theory: I. E. K Ose Dept. of Mechanical Engineering Bo Gazici UniversityDocument51 pagesClassnotes For Classical Control Theory: I. E. K Ose Dept. of Mechanical Engineering Bo Gazici UniversityGürkan YamanNo ratings yet
- Digital Oscillator: Final Mini Project Report OnDocument10 pagesDigital Oscillator: Final Mini Project Report OnNagendra KumarNo ratings yet
- Feedback Linearization Continued: Consider The Control Affine SISO SystemDocument23 pagesFeedback Linearization Continued: Consider The Control Affine SISO SystemJason ChiangNo ratings yet
- Lecture3 Annotated Poles Block DiagramsDocument32 pagesLecture3 Annotated Poles Block DiagramsJoseph AndrewesNo ratings yet
- Vibrations of StructuresDocument9 pagesVibrations of StructuresRafaAlmeidaNo ratings yet
- Digital Oscillator: Final Mini Project Report OnDocument10 pagesDigital Oscillator: Final Mini Project Report OnNagendra KumarNo ratings yet
- Linear and Quadratic FunctionsDocument40 pagesLinear and Quadratic Functionsivyling29No ratings yet
- Filtro LorenzDocument15 pagesFiltro LorenzAgustin AboytesNo ratings yet
- Control Systems 2Document18 pagesControl Systems 2Sengottu VelusamyNo ratings yet
- OU Open University SM358 2007 Exam SolutionsDocument23 pagesOU Open University SM358 2007 Exam Solutionssam smithNo ratings yet
- Chapter1 Limits Continuity RevisedDocument12 pagesChapter1 Limits Continuity Reviseddiktatorimhotep8800No ratings yet
- 263 HomeworkDocument153 pages263 HomeworkHimanshu Saikia JNo ratings yet
- Week 2A - Online Classes - S2020Document17 pagesWeek 2A - Online Classes - S2020Muhammad Tayyab YousafzaiNo ratings yet
- MCT Module 2Document68 pagesMCT Module 2Anish BennyNo ratings yet
- Wa0193.Document4 pagesWa0193.jagarapuyajnasriNo ratings yet
- Control SystemsDocument18 pagesControl SystemsSengottu VelusamyNo ratings yet
- Me 360 Transfer FunctionsDocument3 pagesMe 360 Transfer FunctionsftoomauaeNo ratings yet
- Concourse 18.03 - Lecture #9: MX CX KX X X XDocument4 pagesConcourse 18.03 - Lecture #9: MX CX KX X X XAna Petrovic TomicNo ratings yet
- 1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Document99 pages1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Amandeep SinghNo ratings yet
- STRC201 Sdof JMWB PDFDocument99 pagesSTRC201 Sdof JMWB PDFAkash ChandraNo ratings yet
- Obtaining State-Space Model From Transfer Function or Vice VercaDocument28 pagesObtaining State-Space Model From Transfer Function or Vice VercaMehmet AKBABANo ratings yet
- Feedback Linearisation: N N N N N NDocument22 pagesFeedback Linearisation: N N N N N NJason ChiangNo ratings yet
- Generating Random VariablesDocument7 pagesGenerating Random VariablesTsvetanNo ratings yet
- Viscous Damped Vibration PDFDocument19 pagesViscous Damped Vibration PDFReyman SolasNo ratings yet
- State SpaceDocument20 pagesState SpacepattanayaksuchiNo ratings yet
- Two Lecture VibrationDocument12 pagesTwo Lecture VibrationUjjawal GuptaNo ratings yet
- SHM Review - SHM Using Differential Equations - Critical DampingDocument18 pagesSHM Review - SHM Using Differential Equations - Critical Dampingaaljuhani123No ratings yet
- Lund 9903 SolDocument4 pagesLund 9903 SolAli DurazNo ratings yet
- Ejercicios DSCDocument39 pagesEjercicios DSCFreyley LeyvaNo ratings yet
- PHY2014F Buffler VW1Document125 pagesPHY2014F Buffler VW1Matthew BaileyNo ratings yet
- Unconstrained and Constrained Optimization Algorithms by Soman K.PDocument166 pagesUnconstrained and Constrained Optimization Algorithms by Soman K.PprasanthrajsNo ratings yet
- Fem ViberationDocument18 pagesFem Viberationsaqlain05No ratings yet
- Ch4 PDFDocument31 pagesCh4 PDFRicardo ColosimoNo ratings yet
- Open CVReference ManualDocument417 pagesOpen CVReference ManualAyush MaheshwariNo ratings yet
- Assignment 4Document4 pagesAssignment 4Arun Balajee VasudevanNo ratings yet
- Multivariate Data Analysis AssignmentDocument4 pagesMultivariate Data Analysis AssignmentArun Balajee VasudevanNo ratings yet
- Unit01 DBMSDocument34 pagesUnit01 DBMSayushishi0#No ratings yet
- Neuro Fuzzy Brain Controlled Computer Interface PaperDocument5 pagesNeuro Fuzzy Brain Controlled Computer Interface PaperArun Balajee VasudevanNo ratings yet
- MatlabDocument26 pagesMatlabWinsweptNo ratings yet
- Viterbi India Program Final FlyerDocument1 pageViterbi India Program Final FlyerArun Balajee VasudevanNo ratings yet
- April 19, 2012 Assignment 6 & Solution: Microelectronics-I RazaviDocument8 pagesApril 19, 2012 Assignment 6 & Solution: Microelectronics-I RazaviArun Balajee VasudevanNo ratings yet
- MATLAB - Introduction To RoboticsDocument24 pagesMATLAB - Introduction To RoboticsPrabakaran PrakashNo ratings yet
- MatlabDocument26 pagesMatlabWinsweptNo ratings yet
- Massuchets SPUR ApplicationDocument3 pagesMassuchets SPUR ApplicationArun Balajee VasudevanNo ratings yet
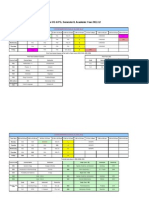
- Time Table 2011-12-2nd Sem FinalDocument13 pagesTime Table 2011-12-2nd Sem FinalRajni YadavNo ratings yet
- Application GuidelinesDocument1 pageApplication GuidelinesArun Balajee VasudevanNo ratings yet
- MATLAB - Introduction To RoboticsDocument24 pagesMATLAB - Introduction To RoboticsPrabakaran PrakashNo ratings yet
- MATLAB - Introduction To RoboticsDocument24 pagesMATLAB - Introduction To RoboticsPrabakaran PrakashNo ratings yet
- General ManagementDocument47 pagesGeneral ManagementRohit KerkarNo ratings yet
- Kerkythea Material Editor Guide 01Document36 pagesKerkythea Material Editor Guide 01sapomasterNo ratings yet
- Incremental and TwiceDocument12 pagesIncremental and TwiceAgung KaryawinaraNo ratings yet
- TestDocument21 pagesTestTri Arini TitisingtyasNo ratings yet
- GRADE 11 Gen Math Inverse FunctionsDocument13 pagesGRADE 11 Gen Math Inverse FunctionsAiejhay Bordaje100% (1)
- Two Steps From Hell Full Track ListDocument13 pagesTwo Steps From Hell Full Track ListneijeskiNo ratings yet
- The Tamil Nadu Commercial Taxes ServiceDocument9 pagesThe Tamil Nadu Commercial Taxes ServiceKumar AvelNo ratings yet
- Test Initial 9FDocument2 pagesTest Initial 9FGeorge StancuNo ratings yet
- Application of Schiff Base Ligamd ComplexDocument7 pagesApplication of Schiff Base Ligamd Complexrajbharaths1094No ratings yet
- The Creative Bureaucracy 2Document45 pagesThe Creative Bureaucracy 2IndirannaNo ratings yet
- AP Macroeconomics: About The Advanced Placement Program (AP)Document2 pagesAP Macroeconomics: About The Advanced Placement Program (AP)Adam NowickiNo ratings yet
- Digital Fabrication in Architecture PDFDocument192 pagesDigital Fabrication in Architecture PDFAndrada Iulia NeagNo ratings yet
- 4 Modes Operations RC4Document37 pages4 Modes Operations RC4Komal BansalNo ratings yet
- Suitcase Lady Christie Mclaren ThesisDocument7 pagesSuitcase Lady Christie Mclaren ThesisWriteMyPaperForMeCheapNewHaven100% (2)
- Test Bank For Marketing 12th Edition LambDocument24 pagesTest Bank For Marketing 12th Edition Lambangelascottaxgeqwcnmy100% (39)
- Manual HandlingDocument14 pagesManual HandlingLenin JambhulkarNo ratings yet
- New Public Service (Denhardt & Denhardt)Document12 pagesNew Public Service (Denhardt & Denhardt)Ika Hartantiningsih100% (1)
- Lantus SoloStar Pen Guide PDFDocument7 pagesLantus SoloStar Pen Guide PDFKai HarukaNo ratings yet
- 13 19 PBDocument183 pages13 19 PBmaxim reinerNo ratings yet
- System Design PrimerDocument60 pagesSystem Design PrimerPendyala SrinivasNo ratings yet
- Key Influence Factors For Ocean Freight Forwarders Selecting Container Shipping Lines Using The Revised Dematel ApproachDocument12 pagesKey Influence Factors For Ocean Freight Forwarders Selecting Container Shipping Lines Using The Revised Dematel ApproachTanisha AgarwalNo ratings yet
- IIT JEE Maths Mains 2000Document3 pagesIIT JEE Maths Mains 2000Ayush SharmaNo ratings yet
- Relative Plate Motion:: Question # Difference Between Relative Plate Motion and Absolute Plate Motion and ApparentDocument9 pagesRelative Plate Motion:: Question # Difference Between Relative Plate Motion and Absolute Plate Motion and ApparentGet TipsNo ratings yet
- How Cooking The Books WorksDocument27 pagesHow Cooking The Books WorksShawn PowersNo ratings yet
- APQP TrainingDocument22 pagesAPQP TrainingSandeep Malik100% (1)
- Manila Jocky Club Vs CADocument20 pagesManila Jocky Club Vs CAryusuki takahashiNo ratings yet
- 332-Article Text-1279-1-10-20170327Document24 pages332-Article Text-1279-1-10-20170327Krisdayanti MendrofaNo ratings yet
- Words From The FilmDocument4 pagesWords From The FilmRuslan HaidukNo ratings yet
- The Wall Dramaturgical PacketDocument24 pagesThe Wall Dramaturgical PacketMarilo CostaNo ratings yet
- Aptitude TestDocument19 pagesAptitude TestSANANo ratings yet
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNFrom EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNRating: 5 out of 5 stars5/5 (1)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.From EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Rating: 5 out of 5 stars5/5 (2)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- Alcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsFrom EverandAlcatel-Lucent Service Routing Architect (SRA) Self-Study Guide: Preparing for the BGP, VPRN and Multicast ExamsNo ratings yet
- PHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZFrom EverandPHP BLUEPRINT: An Essential Beginners Guide to Learn the Realms of PHP From A-ZNo ratings yet
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- Concise Guide to OTN optical transport networksFrom EverandConcise Guide to OTN optical transport networksRating: 4 out of 5 stars4/5 (2)
- Designing and Building Security Operations CenterFrom EverandDesigning and Building Security Operations CenterRating: 3 out of 5 stars3/5 (3)
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityFrom EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityRating: 4.5 out of 5 stars4.5/5 (13)
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxFrom EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxRating: 4.5 out of 5 stars4.5/5 (67)
- Software-Defined Networks: A Systems ApproachFrom EverandSoftware-Defined Networks: A Systems ApproachRating: 5 out of 5 stars5/5 (1)
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)
- Microsoft Certified Azure Fundamentals Study Guide: Exam AZ-900From EverandMicrosoft Certified Azure Fundamentals Study Guide: Exam AZ-900No ratings yet
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)From EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)No ratings yet
- Mastering Linux Security and Hardening - Second Edition: Protect your Linux systems from intruders, malware attacks, and other cyber threats, 2nd EditionFrom EverandMastering Linux Security and Hardening - Second Edition: Protect your Linux systems from intruders, malware attacks, and other cyber threats, 2nd EditionNo ratings yet
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- Cybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringFrom EverandCybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringRating: 5 out of 5 stars5/5 (40)
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationFrom EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationNo ratings yet