You might also like
- 317 ValverdeDocument7 pages317 ValverdeboopelectraNo ratings yet
- Despacho 1Document23 pagesDespacho 1Giancarlo YacasiNo ratings yet
- (Arjun N. Saxena) Invention of Integrated CircuitsDocument564 pages(Arjun N. Saxena) Invention of Integrated Circuitsleo232100% (1)
- Study of Ferroresonance Mitigation TechniquesDocument41 pagesStudy of Ferroresonance Mitigation Techniquesleo232No ratings yet
- Newton Raphson & JacobiDocument21 pagesNewton Raphson & Jacobimadhes14No ratings yet
- Safety Management SystemDocument84 pagesSafety Management Systemleo232No ratings yet
- ANSI Device NumbersDocument7 pagesANSI Device Numbersrajpre1213No ratings yet
- FerroresonanceDocument12 pagesFerroresonanceajayvar87No ratings yet
- Maintenance Handbook On Transformer of 3 Phase Electric Locomotive PDFDocument59 pagesMaintenance Handbook On Transformer of 3 Phase Electric Locomotive PDFLokendraNo ratings yet
- 331 Frey S Railway Electrification Systems EngineeringDocument145 pages331 Frey S Railway Electrification Systems Engineeringdanutzughe100% (1)
- Thermal Power PlantDocument13 pagesThermal Power PlantPradeep Kumar Mehta67% (3)
- Lecture4 Power Flow Techniques Solving by The Gauss Seidel MethodDocument18 pagesLecture4 Power Flow Techniques Solving by The Gauss Seidel Methodtamann2004No ratings yet
- 1HSM 9543 23-03en DCB Application Guide Ed3 - 2013-09 - EnglishDocument60 pages1HSM 9543 23-03en DCB Application Guide Ed3 - 2013-09 - EnglishBelmin ŠabićNo ratings yet
- Environmental and Ecological Effects of Ocean Renewable EnergyDocument14 pagesEnvironmental and Ecological Effects of Ocean Renewable Energyleo232No ratings yet
- Difference Between Switchgear and SwitchboardDocument5 pagesDifference Between Switchgear and Switchboardleo232No ratings yet
- Despacho Otimo PerdasDocument29 pagesDespacho Otimo PerdasTatiane AliceNo ratings yet
- Ghosh Monday July 23 2003Document81 pagesGhosh Monday July 23 2003leo232No ratings yet
- Lecture3-Network Matrices, The Y-Bus Matrix Tap Changing TransformersDocument13 pagesLecture3-Network Matrices, The Y-Bus Matrix Tap Changing Transformersleo232No ratings yet
- Lecture1-Review of Power System Networks, Complex Power, and Per UnitsDocument29 pagesLecture1-Review of Power System Networks, Complex Power, and Per Unitsleo232No ratings yet
- Power System Harmonic Analysis (Jos Arrillaga Bruce Smith, Neville Watson & Alan Wood)Document382 pagesPower System Harmonic Analysis (Jos Arrillaga Bruce Smith, Neville Watson & Alan Wood)Angel Pm90% (10)
- Lecture6 The Fast Decoupled MethodDocument25 pagesLecture6 The Fast Decoupled Methodleo232No ratings yet
- 1 Lect2 4Document47 pages1 Lect2 4Shaban SattiNo ratings yet
- Solutions For Distributin Load Flows 4Document6 pagesSolutions For Distributin Load Flows 4leo232No ratings yet
- Power System Protection 5Document10 pagesPower System Protection 5leo232No ratings yet
- Microgrids PDFDocument27 pagesMicrogrids PDFleo232No ratings yet
- Microgrids 3Document9 pagesMicrogrids 3leo232No ratings yet
- IntroductionDocument5 pagesIntroductionleo232No ratings yet
- Flexible AC Transmission Systems FACTS 8Document8 pagesFlexible AC Transmission Systems FACTS 8leo232No ratings yet
- Flexible AC Transmission Systems FACTS 9Document5 pagesFlexible AC Transmission Systems FACTS 9leo232No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- SM-J700T Esquematico Completo Anibal Garcia IrepairDocument8 pagesSM-J700T Esquematico Completo Anibal Garcia IrepairJuanNo ratings yet
- Cable Size Calculations SpreadsheetDocument4 pagesCable Size Calculations Spreadsheetkiki270977No ratings yet
- Tesys D Green: Catalogue 2017Document48 pagesTesys D Green: Catalogue 2017SavaKrsticNo ratings yet
- 2020 FinalDocument3 pages2020 FinalBen ChouNo ratings yet
- An exciting hobby for building easy electronics projects at homeDocument7 pagesAn exciting hobby for building easy electronics projects at homePeeters GuyNo ratings yet
- Ölflex® Classic 115 Cy BK: Product InformationDocument5 pagesÖlflex® Classic 115 Cy BK: Product InformationPhaniNo ratings yet
- Troubleshoot no video or sound issuesDocument2 pagesTroubleshoot no video or sound issuesbur3bistaNo ratings yet
- Allowable Foundation Settlement For Different StructuresDocument2 pagesAllowable Foundation Settlement For Different StructuresMohammad Abu Al-ToyourNo ratings yet
- Sparet Parts V3F80Document44 pagesSparet Parts V3F80Edgar Flores100% (2)
- D65 - Hydraulic TankDocument1 pageD65 - Hydraulic TankMOHAN MALAKARNo ratings yet
- MCQS ON CE - Fundamentals of Communication EngineeringDocument5 pagesMCQS ON CE - Fundamentals of Communication EngineeringsasirekhaNo ratings yet
- Separately Excited DC Generator ExplainedDocument22 pagesSeparately Excited DC Generator ExplainedAbdulrazzaq50% (2)
- ARTTH - DSL User GuideDocument12 pagesARTTH - DSL User GuideAntónio FreitasNo ratings yet
- 01 A330 Ata 00. Gen Intro Book 3 TroubleshootingDocument30 pages01 A330 Ata 00. Gen Intro Book 3 TroubleshootingOwenNo ratings yet
- DISCUSSION ON MEASURING CVT TAN DELTADocument11 pagesDISCUSSION ON MEASURING CVT TAN DELTAỐng KhóiNo ratings yet
- VTP8 Series Frequency Inverter ManualDocument70 pagesVTP8 Series Frequency Inverter ManualpiernodoyunaNo ratings yet
- Topical Test Chapter 18: AC Circuits Section A: Objective (10 Marks)Document4 pagesTopical Test Chapter 18: AC Circuits Section A: Objective (10 Marks)Wong Chai YenNo ratings yet
- Ae - Lab 6Document6 pagesAe - Lab 6Usman KhalilNo ratings yet
- Radio Data Reference Book Jessop 1967Document148 pagesRadio Data Reference Book Jessop 1967Cubelinho ResuaNo ratings yet
- T/C Extension Cable, FR-KX-G-VVAMSR-1P-1.5SQ: Details of Components CharacteristicsDocument1 pageT/C Extension Cable, FR-KX-G-VVAMSR-1P-1.5SQ: Details of Components CharacteristicsDat NguyenNo ratings yet
- sm2000 GBDocument4 pagessm2000 GBRikky ChaniagoNo ratings yet
- Cmos Digital Vlsi Design: Sequential Logic Design-VIIDocument11 pagesCmos Digital Vlsi Design: Sequential Logic Design-VIIvivek jNo ratings yet
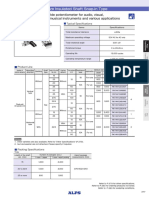
- RK14K 14mm Insulated Shaft PotentiometerDocument7 pagesRK14K 14mm Insulated Shaft PotentiometerRufusyNo ratings yet
- Electromechanical Engineering Curriculum: Addis Ababa Science and Technology UniversityDocument3 pagesElectromechanical Engineering Curriculum: Addis Ababa Science and Technology UniversitykebadsewNo ratings yet
- Advanced High-Power Factor Preregulator: Features DescriptionDocument17 pagesAdvanced High-Power Factor Preregulator: Features DescriptionMedo AntikaNo ratings yet
- Electrical Engineering Interview Questions and AnswersDocument16 pagesElectrical Engineering Interview Questions and Answerssatishfactory94% (32)
- 15767025-02 - A-En - Cooli System - IMDocument36 pages15767025-02 - A-En - Cooli System - IMKathia Bernal RamirezNo ratings yet
- 35kW Active Rectifier PDFDocument6 pages35kW Active Rectifier PDFKashifNo ratings yet
- 6N137 OptocouplerDocument14 pages6N137 OptocouplerAhmad SubkhanNo ratings yet
- Lab - Report: Experiment NoDocument7 pagesLab - Report: Experiment NoRedwan AhmedNo ratings yet