You might also like
- 57 07-05-21 Isaif8 0021-ChenDocument10 pages57 07-05-21 Isaif8 0021-ChenEslam NagyNo ratings yet
- Axial Fan CFD Designing PDFDocument6 pagesAxial Fan CFD Designing PDFuuur35No ratings yet
- J55ODocument15 pagesJ55OUmair MunirNo ratings yet
- 2010 MIT Wind Turbine Blade Design OptimizationDocument12 pages2010 MIT Wind Turbine Blade Design Optimizationsohaib31No ratings yet
- Optimum Design of A Subsonic Axial - Ow Compressor Stage: Applied EnergyDocument9 pagesOptimum Design of A Subsonic Axial - Ow Compressor Stage: Applied EnergyOnnuri WonNo ratings yet
- 1.steam Turbine Rotor GroovesDocument7 pages1.steam Turbine Rotor GroovesRaheem JunaidiNo ratings yet
- Optimization of Axial Compressor Stage Using Nsga-Ii TechniqueDocument5 pagesOptimization of Axial Compressor Stage Using Nsga-Ii TechniqueDanielNo ratings yet
- Chaquet&CarmonaDocument19 pagesChaquet&CarmonaUNsha bee komNo ratings yet
- Performance Evaluation of A Transonic Axial Compressor With Circumferential Casing GroovesDocument14 pagesPerformance Evaluation of A Transonic Axial Compressor With Circumferential Casing GroovesUmair MunirNo ratings yet
- Design and Optimization of The Impeller On Centrifugal Compressor in Fuel Cell VehicleDocument8 pagesDesign and Optimization of The Impeller On Centrifugal Compressor in Fuel Cell VehicleSuherman MuktiNo ratings yet
- Title Numerical Analysis of Compressed Air Engines PerformanDocument8 pagesTitle Numerical Analysis of Compressed Air Engines Performanrobsonrober83No ratings yet
- Design of An Advanced Marine WaterjetDocument9 pagesDesign of An Advanced Marine Waterjetgnd100No ratings yet
- Partial Admission Steam TurbineDocument6 pagesPartial Admission Steam TurbinePratik Joshi100% (1)
- Mi 180114Document18 pagesMi 180114Thomas DalatiNo ratings yet
- Compressor Station Optimization Using Simulation-Based OptimizationDocument10 pagesCompressor Station Optimization Using Simulation-Based OptimizationAmbrish SinghNo ratings yet
- Air-Flow in Multi-Stage Centrifugal CompressorDocument18 pagesAir-Flow in Multi-Stage Centrifugal Compressorqu20awareNo ratings yet
- Three-Dimensional Design of Axial Flow Compressor Blades Using The Ball-Spine AlgorithmDocument9 pagesThree-Dimensional Design of Axial Flow Compressor Blades Using The Ball-Spine Algorithmluisgonzalezf95No ratings yet
- HP Steam Turbine StageDocument8 pagesHP Steam Turbine StageTarun ChoudharyNo ratings yet
- Turbomachinery Design Tools For Teaching Design Concepts For Axial Flow Fans - Compressors and TurbinesDocument16 pagesTurbomachinery Design Tools For Teaching Design Concepts For Axial Flow Fans - Compressors and TurbinessmhbNo ratings yet
- Axial Compressor Optimization Method: IOP Conference Series: Materials Science and EngineeringDocument10 pagesAxial Compressor Optimization Method: IOP Conference Series: Materials Science and EngineeringSami AhmadNo ratings yet
- Axial Turbine Stages Design 1D 2D 3D Simulation Experiment OptimizationDocument10 pagesAxial Turbine Stages Design 1D 2D 3D Simulation Experiment OptimizationAditya SawantNo ratings yet
- Design of A Compressor Stage Using CFD Techniques: Low - Aspect Ratio TransonicDocument18 pagesDesign of A Compressor Stage Using CFD Techniques: Low - Aspect Ratio Transonicshakir hussainNo ratings yet
- Solution of Shellside Pressure Drop and Heat Transfer by Stream Analysis MethodDocument6 pagesSolution of Shellside Pressure Drop and Heat Transfer by Stream Analysis MethodacckypenrynNo ratings yet
- Meridional Considerations of The Centrifugal Compressor DevelopmentDocument11 pagesMeridional Considerations of The Centrifugal Compressor DevelopmentJun GWan ParkNo ratings yet
- Turbocharger Turbine Aerodynamic Optimization For Reduced Fuel Consumption and CO2 Emissions From Heavy-Duty Diesel Engines: Experimental Validation and Flow Field AnalysisDocument16 pagesTurbocharger Turbine Aerodynamic Optimization For Reduced Fuel Consumption and CO2 Emissions From Heavy-Duty Diesel Engines: Experimental Validation and Flow Field AnalysiscostallNo ratings yet
- Nasa Rotor67Document12 pagesNasa Rotor67prakulmittal2No ratings yet
- Hydro Static Bearing IonDocument6 pagesHydro Static Bearing IonJayachandran SenguttuvanNo ratings yet
- CFD Analysis of Screw Compressor Performance: Ahmed Kovacevic, Nikola Stosic and Ian K. SmithDocument28 pagesCFD Analysis of Screw Compressor Performance: Ahmed Kovacevic, Nikola Stosic and Ian K. Smithmahesh_1402No ratings yet
- Small Wind Turbine DesignDocument19 pagesSmall Wind Turbine DesignIqbal MeskinzadaNo ratings yet
- Optimization of The LS89 Axial Turbine Profile Using A CAD and Adjoint Based ApproachDocument13 pagesOptimization of The LS89 Axial Turbine Profile Using A CAD and Adjoint Based ApproachLas UkcuNo ratings yet
- Design Sensitivity Analysis of Air-Lubricated Slider BearingsDocument3 pagesDesign Sensitivity Analysis of Air-Lubricated Slider BearingsDeepak SharmaNo ratings yet
- CNC MachiningDocument10 pagesCNC MachiningIAEME PublicationNo ratings yet
- Axial Flow Compressor PDFDocument7 pagesAxial Flow Compressor PDFkamal arabNo ratings yet
- Advanced CFD Tools For Multi-Stage Turbine Analysis: AlgebraicDocument12 pagesAdvanced CFD Tools For Multi-Stage Turbine Analysis: AlgebraicEr M HnNo ratings yet
- Fulltext 3Document6 pagesFulltext 3ijal84No ratings yet
- Numerical Investigation of CSP Air Cooled CondenseDocument9 pagesNumerical Investigation of CSP Air Cooled CondenseAnimesh GhoshNo ratings yet
- Optimizing Impeller GeometryDocument7 pagesOptimizing Impeller GeometryDanang JoyoeNo ratings yet
- CFD Based Parametric Study of A Subsonic Ush Intake For Cylindrical FuselageDocument8 pagesCFD Based Parametric Study of A Subsonic Ush Intake For Cylindrical FuselagePhạm Công ÁnhNo ratings yet
- Mean Streamline Aerodynamic Performance Analysis of Centrifugal CompressorsDocument7 pagesMean Streamline Aerodynamic Performance Analysis of Centrifugal Compressorsingegnere81No ratings yet
- 0000 Design by Optimization of An Axial-Flux Permanent-Magnet Synchronous MotorDocument5 pages0000 Design by Optimization of An Axial-Flux Permanent-Magnet Synchronous MotorAnonymous hWj4HKIDOF100% (1)
- CFD Analysis of Swept and Leaned Transonic Compressor RotorDocument5 pagesCFD Analysis of Swept and Leaned Transonic Compressor RotorseventhsensegroupNo ratings yet
- 2 Okui - 3D OptDocument11 pages2 Okui - 3D OptAhmed FaridNo ratings yet
- Model Based Strategies For An Optimised Ribbing Design of Large Forming ToolsDocument6 pagesModel Based Strategies For An Optimised Ribbing Design of Large Forming ToolsPankaj ChhabraNo ratings yet
- MCA 2008may6 BauerDocument12 pagesMCA 2008may6 BauerVarun AggarwalNo ratings yet
- Effect of Turning Angle On Flow Field Performance of Linear Bowed Stator in Compressor at Low Mach NumberDocument7 pagesEffect of Turning Angle On Flow Field Performance of Linear Bowed Stator in Compressor at Low Mach NumberMoses DevaprasannaNo ratings yet
- CFD Analysis of Flow in After BurnerDocument10 pagesCFD Analysis of Flow in After BurnermortezaastroNo ratings yet
- Compressor Effects On Specific Fuel Consumption of Kerosene-Fueled Civil TurbofansDocument11 pagesCompressor Effects On Specific Fuel Consumption of Kerosene-Fueled Civil TurbofansboroumandNo ratings yet
- Improving The Process For Sizing Reciprocating CompressorsDocument7 pagesImproving The Process For Sizing Reciprocating CompressorsKong LingweiNo ratings yet
- Structural Analysis of Micro Turbine by Using CFD Dr.R.Rajappan, K ChandrasekarDocument8 pagesStructural Analysis of Micro Turbine by Using CFD Dr.R.Rajappan, K ChandrasekarSaad Al HelyNo ratings yet
- Energies: Wind Turbine Blade Optimal Design Considering Multi-Parameters and Response Surface MethodDocument23 pagesEnergies: Wind Turbine Blade Optimal Design Considering Multi-Parameters and Response Surface MethodBOOPATHI YADAVNo ratings yet
- Jt9D Individual Engine Performance Modelling: Sakhr Abu Darag and Tomas GronstedtDocument7 pagesJt9D Individual Engine Performance Modelling: Sakhr Abu Darag and Tomas GronstedtdausNo ratings yet
- Parametric Study and Design Optimization of A Radial Flow Pump ImpellerDocument9 pagesParametric Study and Design Optimization of A Radial Flow Pump ImpellerErnad BešlagićNo ratings yet
- Comparative Analysis of Bearings For Micro-GT: An Innovative ArrangementDocument26 pagesComparative Analysis of Bearings For Micro-GT: An Innovative Arrangementbatu kuguNo ratings yet
- A Comparison of Thermodynamic Loss Models Applied To The J-79 TurbojetDocument10 pagesA Comparison of Thermodynamic Loss Models Applied To The J-79 TurbojetOmid PilotNo ratings yet
- Contact Analysis For Drum Brakes and Disk Brakes Using AdinaDocument14 pagesContact Analysis For Drum Brakes and Disk Brakes Using AdinaashwaniNo ratings yet
- Nasa Contractor: OsingDocument92 pagesNasa Contractor: OsingRouaissi RidhaNo ratings yet
- Manual of Engineering Drawing: British and International StandardsFrom EverandManual of Engineering Drawing: British and International StandardsRating: 3.5 out of 5 stars3.5/5 (4)
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
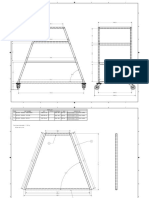
- Main FrameDocument9 pagesMain FrameEslam NagyNo ratings yet
- Quality in Education: Shelley O'Grady, M.SDocument54 pagesQuality in Education: Shelley O'Grady, M.SEslam NagyNo ratings yet
- Mirage ERP Presentation 2019 PDFDocument69 pagesMirage ERP Presentation 2019 PDFEslam Nagy100% (1)
- Archshaders Vol 1Document130 pagesArchshaders Vol 1Michelle KalogerakiNo ratings yet
- Tesi Giada AbateDocument100 pagesTesi Giada AbateEslam NagyNo ratings yet
- BF6M1013 Deutz Diesel Engine Technical Data: Shijiazhuang Houfeng Trading Co. LTDDocument1 pageBF6M1013 Deutz Diesel Engine Technical Data: Shijiazhuang Houfeng Trading Co. LTDEslam NagyNo ratings yet
- Opp Rating Rating: Risk Rating Limit: 8.0 8.0 5.0Document3 pagesOpp Rating Rating: Risk Rating Limit: 8.0 8.0 5.0Eslam NagyNo ratings yet
- Transonic Axial-Flow Blade Shape Optimization Using Evolutionary Algorithm and Three-Dimensional Navier-Stokes SolverDocument11 pagesTransonic Axial-Flow Blade Shape Optimization Using Evolutionary Algorithm and Three-Dimensional Navier-Stokes SolverEslam NagyNo ratings yet
- A CFD Assessment To Subsonic Flow Around NACA4412Document16 pagesA CFD Assessment To Subsonic Flow Around NACA4412Eslam NagyNo ratings yet
- International Material Grade Comparison TableDocument9 pagesInternational Material Grade Comparison Tablenyamuk06100% (4)
- 1 s2.0 S100093611300071X Main PDFDocument11 pages1 s2.0 S100093611300071X Main PDFEslam NagyNo ratings yet
- Effects of Alloying Elements in SteelDocument3 pagesEffects of Alloying Elements in SteelEslam NagyNo ratings yet
- BF6M1013 Deutz Diesel Engine Technical Data: Shijiazhuang Houfeng Trading Co. LTDDocument1 pageBF6M1013 Deutz Diesel Engine Technical Data: Shijiazhuang Houfeng Trading Co. LTDEslam NagyNo ratings yet
- Asme JT Oct2004 Part2Document11 pagesAsme JT Oct2004 Part2Eslam NagyNo ratings yet
- Transonic Axial-Flow Blade Shape Optimization Using Evolutionary Algorithm and Three-Dimensional Navier-Stokes SolverDocument11 pagesTransonic Axial-Flow Blade Shape Optimization Using Evolutionary Algorithm and Three-Dimensional Navier-Stokes SolverEslam NagyNo ratings yet
- Aiaa JPP Rotor37Document7 pagesAiaa JPP Rotor37Eslam NagyNo ratings yet
- Tut24 Turbo PostprocessiHFHngDocument20 pagesTut24 Turbo PostprocessiHFHngEslam NagyNo ratings yet
- PDRDocument14 pagesPDREslam NagyNo ratings yet
- AerodynamicShapeDesign FinalReport Fall2010Document156 pagesAerodynamicShapeDesign FinalReport Fall2010benimmmNo ratings yet
- Tut03 Modeling External Compressible FlowDocument30 pagesTut03 Modeling External Compressible FlowEslam NagyNo ratings yet
- Transonic Flow Over A RAE 2822 AirfoilDocument1 pageTransonic Flow Over A RAE 2822 AirfoilEslam NagyNo ratings yet
- A Basic Experimental Investigation of Passive Control Applied To A Transonic InteractionDocument13 pagesA Basic Experimental Investigation of Passive Control Applied To A Transonic InteractionEslam NagyNo ratings yet
- MSC - Eng - Steady Three-Dimensional Shock Wave Reflection Transition PhenomenaDocument69 pagesMSC - Eng - Steady Three-Dimensional Shock Wave Reflection Transition PhenomenaEslam NagyNo ratings yet
- Blade Design Methods and IssuesDocument48 pagesBlade Design Methods and IssuesEslam NagyNo ratings yet
- Airfoil Geometry ParameterizationDocument25 pagesAirfoil Geometry ParameterizationEslam NagyNo ratings yet
- Gas TurbinesDocument376 pagesGas TurbinesAlan Sala50% (2)
- Fluent OverviewXZDocument48 pagesFluent OverviewXZEslam NagyNo ratings yet
- A CFD Analysis of Blade Row Interactions Within A High-Speed Axial CompressorDocument195 pagesA CFD Analysis of Blade Row Interactions Within A High-Speed Axial CompressorEslam NagyNo ratings yet
- Wind TurbinesDocument163 pagesWind TurbinesEslam Nagy100% (1)
- Product Catalog: Lighting The Led Revolution™Document76 pagesProduct Catalog: Lighting The Led Revolution™Fernando MolinaNo ratings yet
- LEFORT Antoine These Memoire VFDocument135 pagesLEFORT Antoine These Memoire VFLy Huynh PhanNo ratings yet
- Selection of Diesel GeneratorDocument3 pagesSelection of Diesel GeneratordankorankoNo ratings yet
- Exam Survival Guide (Voigt) PDFDocument388 pagesExam Survival Guide (Voigt) PDFJenYerroNo ratings yet
- CR750-CR751 Controller Troubleshooting Bfp-A8871pDocument72 pagesCR750-CR751 Controller Troubleshooting Bfp-A8871pBarry Weller100% (1)
- Grabulov - Current Approach To WeldabilityDocument8 pagesGrabulov - Current Approach To WeldabilityVuhic VuhicNo ratings yet
- Tram Rail en Es FR deDocument6 pagesTram Rail en Es FR deJoel100% (1)
- Wittig RotaryVanes Gas enDocument6 pagesWittig RotaryVanes Gas enManuel GalanNo ratings yet
- Well Completions ServicesDocument10 pagesWell Completions ServicesEgitie GodswillNo ratings yet
- Operating Characteristics: Inlet Volumetric Rate of FlowDocument19 pagesOperating Characteristics: Inlet Volumetric Rate of FlowSandi AslanNo ratings yet
- Power Plants Programme 2016Document163 pagesPower Plants Programme 2016jemmuel100% (1)
- Hydrogen Handbook - Middle EastDocument54 pagesHydrogen Handbook - Middle Eastbfaalh23No ratings yet
- Xlpe CableDocument18 pagesXlpe Cablesopan saNo ratings yet
- HydrogenDocument38 pagesHydrogenClaudio Ibarra Casanova0% (2)
- Updated 7th Grade Final Exam 2020-2021Document9 pagesUpdated 7th Grade Final Exam 2020-2021SANDRA ASAADNo ratings yet
- Spring Summer 2023 Technical Exams ListDocument10 pagesSpring Summer 2023 Technical Exams ListAshraf BadrNo ratings yet
- SpittelauDocument20 pagesSpittelauFranco PiaggioNo ratings yet
- Large Scale FadingDocument10 pagesLarge Scale FadingfauziDWI100% (2)
- Hengxin RF Leaky Cable PDFDocument16 pagesHengxin RF Leaky Cable PDFculeros1No ratings yet
- STS45 May-2016 LR Compressed EN PDFDocument24 pagesSTS45 May-2016 LR Compressed EN PDFAmel Abbas Abbas Abbaker100% (1)
- Hukum Stoke - Transport Phenomena Bird Stewart Lightfoot PDFDocument4 pagesHukum Stoke - Transport Phenomena Bird Stewart Lightfoot PDFMAI_AAN_KURNIAWANNo ratings yet
- NEET Syllabus For Physics: S.No. Class Xi Class XiiDocument2 pagesNEET Syllabus For Physics: S.No. Class Xi Class XiiDHARANGAN B it2018No ratings yet
- Nitrogen Gas Generators: MaxigasDocument8 pagesNitrogen Gas Generators: MaxigasBobcatSNo ratings yet
- Dislocations PDFDocument50 pagesDislocations PDFMirtunjay Kumar100% (1)
- PPP Baramsagar LIS (17-12-2019) - 1Document17 pagesPPP Baramsagar LIS (17-12-2019) - 1Yathiraj R100% (1)
- FRQ Post Nuclear PowerDocument2 pagesFRQ Post Nuclear Powerdenise solerNo ratings yet
- Complete System Ordering Information: Elspec LTDDocument8 pagesComplete System Ordering Information: Elspec LTDJose Garcia CossioNo ratings yet
- Black Body Radiation-Online NotesDocument3 pagesBlack Body Radiation-Online NotesNeeraj Mosawa50% (4)
- Energy Efficient Building Design Development: A Retrospective ApproachDocument9 pagesEnergy Efficient Building Design Development: A Retrospective ApproachghchgNo ratings yet
- REE Questionaire 2009 Philippines PDFDocument80 pagesREE Questionaire 2009 Philippines PDFAlfie xyzNo ratings yet