You might also like
- Project Year Design A Disk Type: Tool Magazine For A CNC MachineDocument46 pagesProject Year Design A Disk Type: Tool Magazine For A CNC MachineIustina LacatusNo ratings yet
- Design of Robotic Arm & PhotoDocument11 pagesDesign of Robotic Arm & PhotoganeshNo ratings yet
- Magnum Prothru The Arm Robotic TorchDocument29 pagesMagnum Prothru The Arm Robotic TorchAnton KiryakovNo ratings yet
- ROB0206EN - A - IRB 460 Data SheetDocument2 pagesROB0206EN - A - IRB 460 Data SheetDraghescu DanielNo ratings yet
- Corexy 04926139Document11 pagesCorexy 04926139CicciputtNo ratings yet
- Linear GuideDocument1,539 pagesLinear Guidered_shobo_85No ratings yet
- Sony STR De345Document51 pagesSony STR De345Anonymous biMSzTyszNo ratings yet
- Tensile TestDocument8 pagesTensile TestChaminduKrishanRupasinghe100% (1)
- STR De245Document32 pagesSTR De245Xavier LoáisigaNo ratings yet
- Mach3 Bl-Mach-V1.1Document2 pagesMach3 Bl-Mach-V1.1borkoNo ratings yet
- 1 - FLD-25 3D Printer Filament MachineDocument11 pages1 - FLD-25 3D Printer Filament MachineNitin PatilNo ratings yet
- CATIA V5 Practice Part DrawingsDocument19 pagesCATIA V5 Practice Part DrawingsSebastianNo ratings yet
- FEMFAT Boundary LayersDocument17 pagesFEMFAT Boundary LayersamitNo ratings yet
- A Seminar ON Compliant Mechanisms: Kaje Rajesh S. En. No. 30802009 TY B-Tech Mechanical EngineeringDocument21 pagesA Seminar ON Compliant Mechanisms: Kaje Rajesh S. En. No. 30802009 TY B-Tech Mechanical EngineeringRajesh Shyamrao Kaje100% (2)
- Indrum Qualica en PDFDocument183 pagesIndrum Qualica en PDFVeronicaNistorNo ratings yet
- DIN-472 - Inele de Siguranta Pentru AlezajeDocument5 pagesDIN-472 - Inele de Siguranta Pentru AlezajeJhonny BNo ratings yet
- Complete Design Report Team JaabazDocument89 pagesComplete Design Report Team JaabazpiyushnsitNo ratings yet
- Desen Arbore de Intrare Reductor PDFDocument1 pageDesen Arbore de Intrare Reductor PDFDan07No ratings yet
- Is IdealSystems Multiproduct IGuide NN W3705 W3710 W3711 W3714 Concealed-System 50-5354-00Document16 pagesIs IdealSystems Multiproduct IGuide NN W3705 W3710 W3711 W3714 Concealed-System 50-5354-00Catalin SpiridonNo ratings yet
- Dictionar Feroviar RO-ENDocument222 pagesDictionar Feroviar RO-ENonesunnyday100% (1)
- Reductoare MotoareDocument243 pagesReductoare MotoareDragosNo ratings yet
- Holonomic Control of A Robot With An Omni-Directional DriveDocument7 pagesHolonomic Control of A Robot With An Omni-Directional DriveGuilherme Pohl100% (1)
- Catalog Universaluri, Bacuri, Flanse BERNARDO - Austria - eMasiniUnelteDocument22 pagesCatalog Universaluri, Bacuri, Flanse BERNARDO - Austria - eMasiniUnelteExpert Masini UnelteNo ratings yet
- On Brushless Motor.Document45 pagesOn Brushless Motor.KUMAR_AMIT199189% (9)
- Wiper & Washer PDFDocument27 pagesWiper & Washer PDFtavi2meNo ratings yet
- Catia P3.V5-6R2013.B23Document1 pageCatia P3.V5-6R2013.B23Vikas VarmaNo ratings yet
- Device Craft Wiper Motor SpecDocument15 pagesDevice Craft Wiper Motor SpecrogerroseNo ratings yet
- CEE 408-13 Railcars 2 - Couplers & Draft Gear-2020Document25 pagesCEE 408-13 Railcars 2 - Couplers & Draft Gear-2020LIU HengxuNo ratings yet
- BLDC Motor: 4 Pole 2 Phase Motor OperationDocument10 pagesBLDC Motor: 4 Pole 2 Phase Motor OperationG.R.AzhaguvelSaranya Professor MechanicalNo ratings yet
- Digital Twin For CNC Machine Tool - Modeling and Using StrategyDocument12 pagesDigital Twin For CNC Machine Tool - Modeling and Using Strategyjwpaprk1No ratings yet
- Arc140 S350 (16) CL System SpecDocument20 pagesArc140 S350 (16) CL System SpecKandregula Mohan BabuNo ratings yet
- UCCNC UsersmanualDocument80 pagesUCCNC UsersmanualcristinaNo ratings yet
- Precision, Stability and Productivity Increase in Throughfeed Centerless GrindingDocument4 pagesPrecision, Stability and Productivity Increase in Throughfeed Centerless GrindingphuongdxNo ratings yet
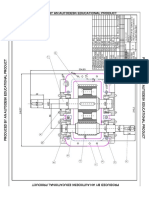
- Produced by An Autodesk Educational ProductDocument1 pageProduced by An Autodesk Educational ProductNicolae95No ratings yet
- Soft Limit ProcedureDocument11 pagesSoft Limit Procedureradio-chaserNo ratings yet
- Robot Gripper DesignDocument51 pagesRobot Gripper DesignDug McCallumNo ratings yet
- Omni WheelsDocument2 pagesOmni WheelsHenry BavofaxseverNo ratings yet
- Hard+drive+motor+driver+schematic: Read/DownloadDocument2 pagesHard+drive+motor+driver+schematic: Read/DownloadKapaleeswaran KapaleeswaranNo ratings yet
- Assembly and Operating Manual: Working PlatformDocument52 pagesAssembly and Operating Manual: Working PlatformAlain DefoeNo ratings yet
- Self Balancing RobotDocument2 pagesSelf Balancing Robotpraveen_kodgirwarNo ratings yet
- Em2402030 C en PDFDocument29 pagesEm2402030 C en PDFaleluisgNo ratings yet
- Profile UNPDocument2 pagesProfile UNPHussenuNo ratings yet
- RoboDK Universal RobotsDocument13 pagesRoboDK Universal RobotsjenorNo ratings yet
- KEB GM 2014 3 - enDocument109 pagesKEB GM 2014 3 - envankarpNo ratings yet
- BibliografieDocument2 pagesBibliografieLucian GrigorasNo ratings yet
- Logp-H R134a Ref AshraeDocument1 pageLogp-H R134a Ref AshraenotasdelingenieroNo ratings yet
- ModTech2015 Program Book of AbstractsDocument293 pagesModTech2015 Program Book of AbstractsBuluc GheorgheNo ratings yet
- Valid and Invalid Isomers of Four Bar and Six Bar MechanismDocument8 pagesValid and Invalid Isomers of Four Bar and Six Bar MechanismUZAIR MANSOORNo ratings yet
- 060 Actuators For RobotsDocument69 pages060 Actuators For RobotsMohamad YazidNo ratings yet
- Regenerative Braking of BLDC MotorsDocument21 pagesRegenerative Braking of BLDC Motorsalthaf hussainNo ratings yet
- Victor Brochure VturnII-16 - 20 - 23 - 26 (20091230)Document16 pagesVictor Brochure VturnII-16 - 20 - 23 - 26 (20091230)atif jabbarNo ratings yet
- Indrumator Surub-PiulitaDocument130 pagesIndrumator Surub-PiulitaAndrei Duca100% (1)
- Worm GearDocument3 pagesWorm Gearprasaad08No ratings yet
- Mini AllDocument562 pagesMini Allkevin_lim90100% (1)
- DAutonomous Toggle Scissor JackDocument19 pagesDAutonomous Toggle Scissor JackAsad Ali100% (1)
- Hitachi HoistDocument74 pagesHitachi HoistlifttecNo ratings yet
- RoBoard RS 1270Document10 pagesRoBoard RS 1270Eng-Mohammad Hassan Al-assadyNo ratings yet
- Hypo NicDocument198 pagesHypo NiclptorreNo ratings yet
- Ball Screw CalculatorDocument60 pagesBall Screw Calculatorمنير بوزيدNo ratings yet
- How to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheFrom EverandHow to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheRating: 4.5 out of 5 stars4.5/5 (2)
- 2012.4wtr - Rally - Fmsci rALLY ROLL CAGE SPECIFICATIONDocument89 pages2012.4wtr - Rally - Fmsci rALLY ROLL CAGE SPECIFICATIONBuzurjmeherNo ratings yet
- Feed Mixer 420-12 490-14: Assembly, Operation and Parts ManualDocument63 pagesFeed Mixer 420-12 490-14: Assembly, Operation and Parts ManualErich illanes uribeNo ratings yet
- Critical ShaftDocument9 pagesCritical ShaftDmc ShinigamiNo ratings yet
- Spare Parts Catalogue: Bajaj Auto LimitedDocument44 pagesSpare Parts Catalogue: Bajaj Auto LimitedAbdulhaq Sayed0% (1)
- Mahindra: 6060 2WD, 6060 4WD and 6075 4WDDocument6 pagesMahindra: 6060 2WD, 6060 4WD and 6075 4WDNayaGaadi Davangere100% (1)
- Catálogo Máquinas EVERDIGMDocument6 pagesCatálogo Máquinas EVERDIGMFernandoA.RodríguezBasoaltoNo ratings yet
- Pruefanleitung LPS AUDI enDocument3 pagesPruefanleitung LPS AUDI enSérgio SantosNo ratings yet
- Service Bulletin Trucks: Companion Flange, ReplacementDocument8 pagesService Bulletin Trucks: Companion Flange, ReplacementZulmary Pirela azuajeNo ratings yet
- Flotation Equipment Selection - OutotecDocument13 pagesFlotation Equipment Selection - Outoteclouza8No ratings yet
- RE Classic Pre-Delivery Checklist v1.0Document7 pagesRE Classic Pre-Delivery Checklist v1.0MihirNo ratings yet
- Volvo Transmission Adaption PDFDocument3 pagesVolvo Transmission Adaption PDFMociran FlorinNo ratings yet
- TM - 10 3930 658 24PDocument7 pagesTM - 10 3930 658 24PRafael S PeñalozaNo ratings yet
- Azkarra: Live Technology LiveDocument23 pagesAzkarra: Live Technology LiveSYED MAZHARNo ratings yet
- PQSensor Brochure 2Document6 pagesPQSensor Brochure 2jpmerronNo ratings yet
- (CLM076) Cat 432E & 442E Product BuletinDocument32 pages(CLM076) Cat 432E & 442E Product BuletinSabito KunnNo ratings yet
- Sim Overt Master DrivesDocument208 pagesSim Overt Master DrivesRaza RizviNo ratings yet
- 360 Degree Wheel Rotation Vehicle: Arunkumar S M, Chandan Kumar Sahu, Yubaraj G M, Jahangeer A BDocument7 pages360 Degree Wheel Rotation Vehicle: Arunkumar S M, Chandan Kumar Sahu, Yubaraj G M, Jahangeer A BUshan AdhikariNo ratings yet
- Engine Log Book - (MaK 6 Main Engine Featured)Document59 pagesEngine Log Book - (MaK 6 Main Engine Featured)jevguNo ratings yet
- Maxon GS 45 ADocument1 pageMaxon GS 45 AElectromateNo ratings yet
- Scania DesignacionDocument24 pagesScania DesignacionarnoldmecNo ratings yet
- DynamometerDocument23 pagesDynamometerhamidNo ratings yet
- RAPTOR 2540-3240-4240-5240: RegulationDocument54 pagesRAPTOR 2540-3240-4240-5240: RegulationjwdNo ratings yet
- R580LA 6X4 TrukDocument2 pagesR580LA 6X4 TrukPramono TeguhNo ratings yet
- Ptitchener Gearboxreport FullDocument25 pagesPtitchener Gearboxreport Fullapi-244906204No ratings yet
- Us2590280 PDFDocument4 pagesUs2590280 PDFbelchior alvaroNo ratings yet
- Spare Parts Manual: Engine: ART - NO.: 3CM080404MENDocument24 pagesSpare Parts Manual: Engine: ART - NO.: 3CM080404MENcharlesNo ratings yet
- HS-30 Robopac BrochuresDocument6 pagesHS-30 Robopac BrochuresAdi MulyonoNo ratings yet
- Chapter Three: Economic DispatchDocument15 pagesChapter Three: Economic Dispatchsagar0% (1)
- Linked PDFDocument150 pagesLinked PDFroparts clujNo ratings yet