You might also like
- 3° J.A.Q Daniel TarrilloDocument4 pages3° J.A.Q Daniel TarrilloVictor Raul AymachoqueNo ratings yet
- 27 de Mayo PRECIO VEADocument22 pages27 de Mayo PRECIO VEAVictor Raul AymachoqueNo ratings yet
- Objetivismo y SibjetivismoDocument5 pagesObjetivismo y SibjetivismoVictor Raul AymachoqueNo ratings yet
- Ley UniversitariaDocument22 pagesLey UniversitariaVictor Raul AymachoqueNo ratings yet
- Directorio Minero PerúDocument102 pagesDirectorio Minero PerúVictor Raul Aymachoque67% (3)
- Presentacion Posibles Usos de Terrenos Afectados Por OperaciDocument118 pagesPresentacion Posibles Usos de Terrenos Afectados Por OperaciVictor Raul AymachoqueNo ratings yet
- Capitulo VDocument16 pagesCapitulo VVictor Raul AymachoqueNo ratings yet
- Comunicación VisualDocument5 pagesComunicación Visualmemowebber100% (1)
- El Señor de SipánDocument3 pagesEl Señor de SipánVictor Raul AymachoqueNo ratings yet
- Código de Ética Del Ministerio Público PreámbuloDocument3 pagesCódigo de Ética Del Ministerio Público PreámbuloVictor Raul AymachoqueNo ratings yet
- DELITOSDocument3 pagesDELITOSVictor Raul AymachoqueNo ratings yet
- Gestion InmobiliariaDocument70 pagesGestion InmobiliariaRodrigo AndresNo ratings yet
- Alteraciones Naturales Cierre de Mina WDCDocument43 pagesAlteraciones Naturales Cierre de Mina WDCFredyOtazuFsFimNo ratings yet
- Foro CuscoDocument16 pagesForo CuscoVictor Raul AymachoqueNo ratings yet
- Diseño de Investigación (Diapositivas)Document55 pagesDiseño de Investigación (Diapositivas)Georgia MeliéNo ratings yet
- To de Ley 28090 Que Regula El Cierre de Minas ActualizadoDocument47 pagesTo de Ley 28090 Que Regula El Cierre de Minas ActualizadoJuan Norberto Flores LopezNo ratings yet
- Alteraciones Naturales Cierre de Mina WDCDocument43 pagesAlteraciones Naturales Cierre de Mina WDCFredyOtazuFsFimNo ratings yet
- Guía MINERÍA cierre minas PerúDocument62 pagesGuía MINERÍA cierre minas PerúJaime Borda100% (1)
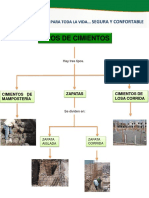
- Tipos de cimientos y su proceso constructivoDocument7 pagesTipos de cimientos y su proceso constructivoVictor Raul AymachoqueNo ratings yet
- Introduccion A Metodos de MinadoDocument15 pagesIntroduccion A Metodos de Minadodavidesteban1993No ratings yet
- Cemento 2 ProduccionDocument35 pagesCemento 2 ProduccionElvis AsencioNo ratings yet
- Concreto Armado en GeneralDocument24 pagesConcreto Armado en GeneralVictor Raul AymachoqueNo ratings yet
- Introduccion A Metodos de MinadoDocument15 pagesIntroduccion A Metodos de Minadodavidesteban1993No ratings yet
- Concreto Armado en GeneralDocument24 pagesConcreto Armado en GeneralVictor Raul AymachoqueNo ratings yet
- Introduccion A Metodos de MinadoDocument15 pagesIntroduccion A Metodos de Minadodavidesteban1993No ratings yet
- Apunte de Metodologia de Investigacion Cientifica PDFDocument31 pagesApunte de Metodologia de Investigacion Cientifica PDFVenancio L. Galvan EspinozaNo ratings yet
- Estudioiimp3 MineriailegalDocument108 pagesEstudioiimp3 MineriailegalMisterJanNo ratings yet
- Manual MineriaDocument290 pagesManual Mineriadfmejiay100% (4)
- Iper CasDocument23 pagesIper CasVictor Raul AymachoqueNo ratings yet
- Matriz LogicaDocument3 pagesMatriz LogicaKaterin Franchesca Condori MezaNo ratings yet
- Algebra Lineal (Matriz Inversa)Document7 pagesAlgebra Lineal (Matriz Inversa)Joao CorralesNo ratings yet
- Ejemplo de Convolución en MatlabDocument1 pageEjemplo de Convolución en MatlabJhonatan Michael Quispe100% (2)
- Pauta Certamen II-IEMECDocument4 pagesPauta Certamen II-IEMECbastian arriagadaNo ratings yet
- Abau AlxebraDocument11 pagesAbau AlxebramanuelNo ratings yet
- 2 DeterminantesDocument23 pages2 Determinantesangela mamani quispeNo ratings yet
- Informe ALGDocument20 pagesInforme ALGRenzo0% (1)
- Sistema de Ecuaciones Lineales IIDocument25 pagesSistema de Ecuaciones Lineales IIAntonio LMNo ratings yet
- Clase07 PDFDocument19 pagesClase07 PDFJosé Luis SonccoNo ratings yet
- Esquema-Resumen Derivadas.Document1 pageEsquema-Resumen Derivadas.Annys ZapataNo ratings yet
- 1.3 Semiespacios y ConvexidadDocument10 pages1.3 Semiespacios y ConvexidadZeppeli CeasarNo ratings yet
- Rpaterni - Ejercicios Teóricos de Multiplicación de MatricesDocument5 pagesRpaterni - Ejercicios Teóricos de Multiplicación de MatricesInternetsuckerNo ratings yet
- Matrices Tema #1Document5 pagesMatrices Tema #1Jose QuirozNo ratings yet
- Tabla de Derivadas e IntegralesDocument1 pageTabla de Derivadas e IntegralesCurtis ReedNo ratings yet
- A07 1 PDFDocument192 pagesA07 1 PDFAnabel AguileraNo ratings yet
- Taller 2 Algebra MatricialDocument31 pagesTaller 2 Algebra MatricialVelásquezSergioNo ratings yet
- Producto Entre MatricesDocument5 pagesProducto Entre MatricesSharick CaballeroNo ratings yet
- Ejercicios de Matrices y DeterminantesDocument9 pagesEjercicios de Matrices y DeterminantesChristopher BlakeNo ratings yet
- Examen Resuelto Matemáticas IIDocument15 pagesExamen Resuelto Matemáticas IIrodrigoNo ratings yet
- Derivación de funciones compuestas: Regla de la cadenaDocument9 pagesDerivación de funciones compuestas: Regla de la cadenacarlosp7682No ratings yet
- Practica Nº2 Mat 1103 G I-2023Document3 pagesPractica Nº2 Mat 1103 G I-2023Gomez Mamani Heidy NayelyNo ratings yet
- Introducción a la teoría de distribuciones y espacios de Sobolev vectorialesDocument15 pagesIntroducción a la teoría de distribuciones y espacios de Sobolev vectorialesLiseth Natalia Cantillo GaviriaNo ratings yet
- Prueba Métodos Matemáticos II 2018 UNEDDocument2 pagesPrueba Métodos Matemáticos II 2018 UNEDAlvaro ReyNo ratings yet
- Lcin U1 Ea JopmDocument11 pagesLcin U1 Ea Jopmineszapiain100% (1)
- Practica 6 INTEGRALES DE SUPERFICIE (1) - Convertido-ComprimidoDocument28 pagesPractica 6 INTEGRALES DE SUPERFICIE (1) - Convertido-ComprimidoJonathan David Davila SicchaNo ratings yet
- Integrales-Indefinidas-Resueltas-124Document3 pagesIntegrales-Indefinidas-Resueltas-124re-natoNo ratings yet
- Unidad 2 - Tarea 2 - Métodos de Integración - Informe Grupal - 100411 - 90Document38 pagesUnidad 2 - Tarea 2 - Métodos de Integración - Informe Grupal - 100411 - 90Klao OrtizNo ratings yet
- Proyecto 1 Inter 1Document19 pagesProyecto 1 Inter 1Javier Estuardo Ordoñez SigalNo ratings yet
- Compilado Trabajo 2 Calculo IntegralDocument27 pagesCompilado Trabajo 2 Calculo IntegralLilleyra RomeroNo ratings yet
- Ejercicios Propuestos de Matriz InversaDocument2 pagesEjercicios Propuestos de Matriz InversaSANTIAGO JAEN MAMANINo ratings yet
- Ejercicios Integrales IndefinidasDocument14 pagesEjercicios Integrales Indefinidasm_montielNo ratings yet