You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Retaining Wall DesignDocument106 pagesRetaining Wall Designriz2010No ratings yet
- Building A Change Management OfficeDocument7 pagesBuilding A Change Management OfficeOladunni AfolabiNo ratings yet
- The Role of Transaction Advisers in A PPP Project PDFDocument15 pagesThe Role of Transaction Advisers in A PPP Project PDFOladunni AfolabiNo ratings yet
- 06-GB Moment ConnectionsDocument16 pages06-GB Moment ConnectionscblerNo ratings yet
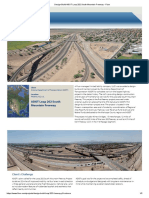
- Design-Build ADOT Loop 202 South Mountain Freeway - FluorDocument2 pagesDesign-Build ADOT Loop 202 South Mountain Freeway - FluorOladunni AfolabiNo ratings yet
- Planning Commision - Model-RFQDocument93 pagesPlanning Commision - Model-RFQPradeep Reddy BoppidiNo ratings yet
- QMS MANUAL - QMS MNL 51 001 - R0 - ApprovedDocument52 pagesQMS MANUAL - QMS MNL 51 001 - R0 - ApprovedOladunni Afolabi100% (3)
- How To Calculate Bearing Capacity of Soil From Plate Load TestDocument14 pagesHow To Calculate Bearing Capacity of Soil From Plate Load TestOladunni AfolabiNo ratings yet
- Loop 202 Preliminary Design Public Input Meeting Report Presentation Boards Appendix GDocument6 pagesLoop 202 Preliminary Design Public Input Meeting Report Presentation Boards Appendix GOladunni AfolabiNo ratings yet
- 29.00 Design Procedures For C and C v19Document11 pages29.00 Design Procedures For C and C v19Oladunni AfolabiNo ratings yet
- Proposed Osara Dam Water Treatment WorksDocument1 pageProposed Osara Dam Water Treatment WorksOladunni AfolabiNo ratings yet
- The Role of Transaction Advisers in A PPP Project PDFDocument15 pagesThe Role of Transaction Advisers in A PPP Project PDFOladunni AfolabiNo ratings yet
- Wire Size and Amp Ratings PDFDocument3 pagesWire Size and Amp Ratings PDFOladunni AfolabiNo ratings yet
- Financial Proposal TemplateDocument6 pagesFinancial Proposal TemplateAndile Ntuli100% (1)
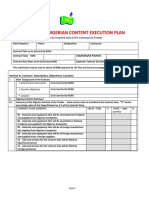
- Attachment Iv - Nigeria Content Execution Plan PDFDocument4 pagesAttachment Iv - Nigeria Content Execution Plan PDFOladunni Afolabi100% (3)
- Audit Report 2013-11 - Public Works - Construction Contracts Review (AUD14003) (City Wide)Document7 pagesAudit Report 2013-11 - Public Works - Construction Contracts Review (AUD14003) (City Wide)Oladunni AfolabiNo ratings yet
- Design Parameters For Longitudinal Bars (Beams - BS 8110)Document3 pagesDesign Parameters For Longitudinal Bars (Beams - BS 8110)Oladunni AfolabiNo ratings yet
- Traffic Parameter DefinitionsDocument1 pageTraffic Parameter DefinitionsOladunni AfolabiNo ratings yet
- Attachment IV - Nigeria Content Execution PlanDocument4 pagesAttachment IV - Nigeria Content Execution PlanOladunni AfolabiNo ratings yet
- 3.3kw Solar Array Support StructureDocument6 pages3.3kw Solar Array Support StructureOladunni AfolabiNo ratings yet
- Church Sound BookDocument43 pagesChurch Sound BookKevin BroussardNo ratings yet
- Sector Insights: Skills and Performance Challenges in The Energy SectorDocument13 pagesSector Insights: Skills and Performance Challenges in The Energy SectorOladunni AfolabiNo ratings yet
- Automated Computerized GarageDocument1 pageAutomated Computerized GarageOladunni AfolabiNo ratings yet
- VarshaB SessionVII 29dec2006 PDFDocument20 pagesVarshaB SessionVII 29dec2006 PDFOladunni AfolabiNo ratings yet
- Admin Block ElevationDocument1 pageAdmin Block ElevationOladunni AfolabiNo ratings yet
- 2013-Pump Sizing With Exercises r1Document25 pages2013-Pump Sizing With Exercises r1edhy_03No ratings yet
- Fighting Sexual TemptationsDocument27 pagesFighting Sexual TemptationsOladunni AfolabiNo ratings yet
- Admin Block-Floors PlansDocument1 pageAdmin Block-Floors PlansOladunni AfolabiNo ratings yet
- What Are Exegesis, Eisegesis, and Hermeneutics - PDFDocument5 pagesWhat Are Exegesis, Eisegesis, and Hermeneutics - PDFOladunni Afolabi100% (1)
- Beme For DamDocument5 pagesBeme For DamOladunni Afolabi50% (2)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Boomer M-Series Technical Specification tcm835-1533266 PDFDocument8 pagesBoomer M-Series Technical Specification tcm835-1533266 PDFseferinoNo ratings yet
- Minimum Turning Path of VehiclesDocument31 pagesMinimum Turning Path of VehiclesGlenn PaaNo ratings yet
- 797F EngDocument2 pages797F EngJuan Galarza AiteNo ratings yet
- Spring 2023 - CS304 - 2Document4 pagesSpring 2023 - CS304 - 2namra misbahNo ratings yet
- Palamatic LITE Vacuum Tube Lifter DatasheetDocument4 pagesPalamatic LITE Vacuum Tube Lifter DatasheetAntónio Pedro TavaresNo ratings yet
- Iveco AD AT 380T38 WHDocument2 pagesIveco AD AT 380T38 WHEndang WahyudiNo ratings yet
- S 12F BT Operator ManualDocument64 pagesS 12F BT Operator ManualKoczyNo ratings yet
- Bulldozer d65pDocument10 pagesBulldozer d65pRisky UpNo ratings yet
- Operating Manual: H40-60XT (A380)Document180 pagesOperating Manual: H40-60XT (A380)mohamed100% (1)
- Learner M1 English Product Familiarization Training TextDocument110 pagesLearner M1 English Product Familiarization Training TextHernanNo ratings yet
- Camion Dumper Articullado PDFDocument5 pagesCamion Dumper Articullado PDFDenilson Q. ViverosNo ratings yet
- 531-70 Opereator Manual (Part1)Document121 pages531-70 Opereator Manual (Part1)Thava Kumar Devanayagam75% (4)
- Miniart German Cargo Truck L1500S #38014 PDFDocument10 pagesMiniart German Cargo Truck L1500S #38014 PDFMark AbNo ratings yet
- AutoStop-Heavy USB BluetoothDocument2 pagesAutoStop-Heavy USB BluetoothBui Huu BinhNo ratings yet
- 2011 Guide To Vehicle Weight and Dimension in OntarioDocument227 pages2011 Guide To Vehicle Weight and Dimension in OntarioNorbertNo ratings yet
- RT70E IntroduccionDocument26 pagesRT70E IntroduccionGustavo RodriguezNo ratings yet
- D20S-7 Sb2376e01Document149 pagesD20S-7 Sb2376e01Ricardo VieiraNo ratings yet
- Advanced Transport ManagementDocument5 pagesAdvanced Transport ManagementCOT Management Training InsituteNo ratings yet
- GD511A 1PdfDocument32 pagesGD511A 1PdfDanar PrasastyoNo ratings yet
- Safety Manual For DumperDocument9 pagesSafety Manual For DumperHimanshu Bhushan100% (1)
- Operating Instr. Reachstackers 3578011601 - EN - 07.2011 (NEW) PDFDocument258 pagesOperating Instr. Reachstackers 3578011601 - EN - 07.2011 (NEW) PDFmario100% (1)
- 2000 Chevy Truck S10 T10 Blazer Transfer Case ReplacementDocument8 pages2000 Chevy Truck S10 T10 Blazer Transfer Case ReplacementKiddNo ratings yet
- BS TBR Regionals Brochure BSEU PDFDocument8 pagesBS TBR Regionals Brochure BSEU PDFwillupowersNo ratings yet
- WORKSHOP MANUAL ADT30 Release 2Document1,352 pagesWORKSHOP MANUAL ADT30 Release 2Carey Mathews-Boon94% (17)
- Mining TruckDocument58 pagesMining TruckDavid Nathanael MarpaungNo ratings yet
- Jungheinrich EFG 218 Forklift TruckDocument454 pagesJungheinrich EFG 218 Forklift TruckLuis Mir100% (1)
- CBD20S Cbd20s-Iii CBD20SRDocument3 pagesCBD20S Cbd20s-Iii CBD20SRFelix StancioiuNo ratings yet
- The Golden River Capacitive Pad Weigh-In-Motion System - Life and TimesDocument18 pagesThe Golden River Capacitive Pad Weigh-In-Motion System - Life and TimesYosep Agung PurnomoNo ratings yet
- Raymond 7000 SeriesDocument26 pagesRaymond 7000 SeriesFrancisco BastidasNo ratings yet
- Cdcomplete PDFDocument164 pagesCdcomplete PDFMarian Placzek100% (2)