You might also like
- Test1Review 1Document2 pagesTest1Review 1Cathy NguyenNo ratings yet
- hwk16 Su2010Document8 pageshwk16 Su2010Sophie LiuNo ratings yet
- Circular Tow One - and Two Article Aeromodellers. July August 1975Document6 pagesCircular Tow One - and Two Article Aeromodellers. July August 1975vuelolibremotorNo ratings yet
- Physics Dynamics Workbook ProblemsDocument2 pagesPhysics Dynamics Workbook ProblemswelcometotheswampNo ratings yet
- Prandtl's Lifting-Line Theory for Incompressible Flow Over Finite WingsDocument30 pagesPrandtl's Lifting-Line Theory for Incompressible Flow Over Finite WingsrevandifitroNo ratings yet
- ch02 2Document7 pagesch02 2Siow Shung Churn75% (4)
- C T Sun Mechanics of Aircraft Structures Solution 160327193546 PDFDocument270 pagesC T Sun Mechanics of Aircraft Structures Solution 160327193546 PDFLeonardo AlvesNo ratings yet
- Free Body DiagramsDocument10 pagesFree Body Diagramsatif irshadNo ratings yet
- Position Analysis of Mechanisms Using Algebraic MethodsDocument47 pagesPosition Analysis of Mechanisms Using Algebraic MethodszhingalahoolaNo ratings yet
- Axis conventions and coordinate systems for aircraft motion analysisDocument3 pagesAxis conventions and coordinate systems for aircraft motion analysisRahul KooraNo ratings yet
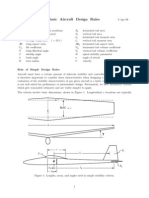
- Basic Aircraft Design RulesDocument8 pagesBasic Aircraft Design RulesAbdelrahman Nassif100% (1)
- Lab 2 - Lift and Drag Characteristics of A Symmetric AirfoilDocument20 pagesLab 2 - Lift and Drag Characteristics of A Symmetric AirfoilYashvi SrivastavaNo ratings yet
- Pliers ManufacturingDocument16 pagesPliers ManufacturingHaizmeer Bonzie100% (1)
- DOM Full Notes PDFDocument263 pagesDOM Full Notes PDFCHAMAN R100% (1)
- 21a ShearFlow ShearCenterDocument48 pages21a ShearFlow ShearCenterJames BlockeNo ratings yet
- Effect of Trebuchet Design on Projectile RangeDocument9 pagesEffect of Trebuchet Design on Projectile RangeNerinel CoronadoNo ratings yet
- A (Bold Faced) : by HandDocument79 pagesA (Bold Faced) : by Handএ. এইচ ফিরোজNo ratings yet
- SupersonicairfoilresearchDocument21 pagesSupersonicairfoilresearchapi-542671864No ratings yet
- Line-of-Sight Guidance Techniques for Manned Orbital RendezvousDocument331 pagesLine-of-Sight Guidance Techniques for Manned Orbital Rendezvouscrocomodx100% (1)
- Flip Problem SetDocument4 pagesFlip Problem SetNikhole JaneNo ratings yet
- Static Force Analysis ProblemsDocument8 pagesStatic Force Analysis Problemsa c s Kumar100% (1)
- Analytical Calculation of Helicopter Main Rotor Blade Flight Loads in Hover and Forward FlightDocument24 pagesAnalytical Calculation of Helicopter Main Rotor Blade Flight Loads in Hover and Forward FlightPhillip WilkinsonNo ratings yet
- Shear stresses and shear centre analysisDocument9 pagesShear stresses and shear centre analysisNithesh ShamNo ratings yet
- Torsion of BarsDocument33 pagesTorsion of Barskrishna kumar100% (1)
- Design and Linear Static Analysis of Transport Aircraft Vertical Tail For Different Rudder Deflection (Rotation)Document13 pagesDesign and Linear Static Analysis of Transport Aircraft Vertical Tail For Different Rudder Deflection (Rotation)Alaek Nu'manNo ratings yet
- Find the Area Without FormulasDocument10 pagesFind the Area Without FormulashuseinkNo ratings yet
- Chosen Problems and Their Final Solutions of Chap. 1 (Waldron)Document7 pagesChosen Problems and Their Final Solutions of Chap. 1 (Waldron)Fuu HouHouNo ratings yet
- Kinematics of Machinery Unit 1Document100 pagesKinematics of Machinery Unit 1Harinath GowdNo ratings yet
- Thin AirfoilDocument25 pagesThin AirfoilmgskumarNo ratings yet
- History and Future of FEADocument30 pagesHistory and Future of FEAKothilngamNo ratings yet
- RocketDocument45 pagesRocketDefenceDog100% (1)
- Dynamics KinematicsDocument32 pagesDynamics Kinematicsวอ แวณNo ratings yet
- Aircraft Structures - 2 Basic FieldDocument42 pagesAircraft Structures - 2 Basic FieldVenkat Athmanathan100% (1)
- Flight DynamicsDocument12 pagesFlight Dynamicsthomasvictor2005No ratings yet
- Calculation of The Parameters of Ridge Waveguide PDFDocument6 pagesCalculation of The Parameters of Ridge Waveguide PDFవేలుసామి లింగాసామి100% (1)
- Newtonian Theory HypersonicDocument26 pagesNewtonian Theory HypersonicEdersonNo ratings yet
- Engineering Graphics Essentials With AutoCAD 2016 - InstructionDocument99 pagesEngineering Graphics Essentials With AutoCAD 2016 - InstructionygtklrclrNo ratings yet
- Dynamic Analysis of Six Bar Mechanical PressDocument9 pagesDynamic Analysis of Six Bar Mechanical PressRts VeselinocNo ratings yet
- Euler Angles Coordinate TransformationsDocument3 pagesEuler Angles Coordinate TransformationsPetar Juric0% (1)
- Cubic Spline InterpolationDocument14 pagesCubic Spline InterpolationAnelya YerkinbekNo ratings yet
- Rotational MechanicsDocument17 pagesRotational MechanicsAnant KumarNo ratings yet
- Aerodynamics - IIDocument10 pagesAerodynamics - IIVejay RamNo ratings yet
- A Modified Rainflow Counting Hong1991 PDFDocument5 pagesA Modified Rainflow Counting Hong1991 PDFRanu guptaNo ratings yet
- Rotational Kinematics Worksheet PacketDocument12 pagesRotational Kinematics Worksheet PacketAbraham RobinsonNo ratings yet
- Solution CH4Document39 pagesSolution CH4roundstorm1100% (1)
- Twenty-Five Years of Ramjet Development: William H. AveryDocument11 pagesTwenty-Five Years of Ramjet Development: William H. AveryHoàng DavidNo ratings yet
- Rocket Stages: InputDocument2 pagesRocket Stages: InputNiloy DasNo ratings yet
- Ae 6401 Aerodynamics1 Two MarksDocument13 pagesAe 6401 Aerodynamics1 Two MarksSun Heifer50% (2)
- Orbital Mechanics GuideDocument17 pagesOrbital Mechanics Guidevelan2745100% (1)
- Rr411405 Advanced Kinematics and DynamicsDocument11 pagesRr411405 Advanced Kinematics and DynamicsSRINIVASA RAO GANTANo ratings yet
- 9A21504 Aerospace Vehicle Structures IIDocument8 pages9A21504 Aerospace Vehicle Structures IIsivabharathamurthyNo ratings yet
- MODELING MODEL ROCKETS: OPTIMIZING ROCKETRYDocument20 pagesMODELING MODEL ROCKETS: OPTIMIZING ROCKETRYMario Puppi100% (1)
- Newsletter 346Document9 pagesNewsletter 346pete pansNo ratings yet
- Vibration 5 11Document20 pagesVibration 5 11Aalekh PrajapatiNo ratings yet
- Equivalent Force Systems and Free Body Diagrams Solved ProblemsDocument14 pagesEquivalent Force Systems and Free Body Diagrams Solved ProblemsYun RamNo ratings yet
- Here are the free-body and kinetic diagrams:Block A:yBlock B:yFBD:FBD:NNμkNμkNWWKD:KD:mamaxxDocument50 pagesHere are the free-body and kinetic diagrams:Block A:yBlock B:yFBD:FBD:NNμkNμkNWWKD:KD:mamaxxMuhd Salman FarisiNo ratings yet
- Particle Kinetics Force, Mass and AccelerationDocument7 pagesParticle Kinetics Force, Mass and AccelerationJeric Ryan GalanNo ratings yet
- F Ma Where F Is The Resultant Unbalanced Force Acting On The Particle, and A Is TheDocument3 pagesF Ma Where F Is The Resultant Unbalanced Force Acting On The Particle, and A Is TheJhasper FLoresNo ratings yet
- University of Palestine Fluid Statics Chapter SummaryDocument97 pagesUniversity of Palestine Fluid Statics Chapter SummaryABDFERNo ratings yet
- HW8Document25 pagesHW8Martin CabonceNo ratings yet
- Experiment 15: Exploring The World of PolymersDocument6 pagesExperiment 15: Exploring The World of PolymersABDFERNo ratings yet
- Fluid Mechanics EIT ReviewDocument33 pagesFluid Mechanics EIT ReviewABDFERNo ratings yet
- Trihedron TNB Frame PDFDocument43 pagesTrihedron TNB Frame PDFAneelaNo ratings yet
- Department of Civil Engineering Course Outline of Semester: Fall 2019Document2 pagesDepartment of Civil Engineering Course Outline of Semester: Fall 2019Rayhan CreationNo ratings yet
- Pan Pearl River Delta Physics Olympiad 2016Document5 pagesPan Pearl River Delta Physics Olympiad 2016Bhawna SharmaNo ratings yet
- Lecture Powerpoints: Physics For Scientists and Engineers, With Modern Physics, 4 EditionDocument46 pagesLecture Powerpoints: Physics For Scientists and Engineers, With Modern Physics, 4 EditionMuhammad HarisNo ratings yet
- 03 KinematicsHertzFlexures SullivanDocument50 pages03 KinematicsHertzFlexures SullivanSubhash AhujaNo ratings yet
- Physics ProDocument7 pagesPhysics ProArup DuttaNo ratings yet
- Ch13 SSMDocument18 pagesCh13 SSMJuanca AbadNo ratings yet
- Fluid DynamicsDocument9 pagesFluid DynamicsSampath KumarNo ratings yet
- Electrostatics, Coulombs Law, Lines of Force, IIT JEE Electrostatics, Free Study Material of ElectrostaticsDocument5 pagesElectrostatics, Coulombs Law, Lines of Force, IIT JEE Electrostatics, Free Study Material of ElectrostaticsKrunal MamtoraNo ratings yet
- Assignment 1Document2 pagesAssignment 1Fizz MartinNo ratings yet
- Various Methods of Tunnel Lining Design in Elastically Embedded Soil PDFDocument5 pagesVarious Methods of Tunnel Lining Design in Elastically Embedded Soil PDFNaveen RNo ratings yet
- MSc Physics SyllabusDocument70 pagesMSc Physics SyllabusNISHEENA P KNo ratings yet
- Project Client Job # Calc # Prestressed Concrete Section AnalysisDocument52 pagesProject Client Job # Calc # Prestressed Concrete Section AnalysisMacdonald NdjiveNo ratings yet
- Basic of ThermodynamicsDocument12 pagesBasic of ThermodynamicsTeeranun NakyaiNo ratings yet
- A First Course On Variational Methods in Structural Mechanics and EngineeringDocument223 pagesA First Course On Variational Methods in Structural Mechanics and EngineeringPablo A. Domínguez L.No ratings yet
- Does The Inertia of A Body Depend Upon Its Energy-ContentDocument4 pagesDoes The Inertia of A Body Depend Upon Its Energy-ContentAle FatalaNo ratings yet
- FM Assignment 2Document8 pagesFM Assignment 2jayakumarNo ratings yet
- Optimization and Numerical Simulation of Outlet of Twin Screw ExtruderDocument5 pagesOptimization and Numerical Simulation of Outlet of Twin Screw ExtruderGabriel PóvoaNo ratings yet
- P2 Forces and Terminal Velocity HigherDocument12 pagesP2 Forces and Terminal Velocity HigherdownendscienceNo ratings yet
- Summative Final G9 - PhysicsDocument6 pagesSummative Final G9 - Physicsjv perido100% (1)
- Apendice B - Transport Phenomena - Bird 2edDocument9 pagesApendice B - Transport Phenomena - Bird 2edarur007No ratings yet
- Lab MruDocument6 pagesLab MruAnaRuthAriasNo ratings yet
- FEM CIVIL ENGINEERINGDocument3 pagesFEM CIVIL ENGINEERINGamitaiiscNo ratings yet
- Fluent HeatTransfer L04 NaturalConvectionDocument51 pagesFluent HeatTransfer L04 NaturalConvectionsingourNo ratings yet
- A.3 Class Qs 2023-24Document8 pagesA.3 Class Qs 2023-24derrickzptofficialNo ratings yet
- Static and Dynamic BalancingDocument25 pagesStatic and Dynamic BalancingmanilycanNo ratings yet
- 1 Tutorial - Concurrent ForcesDocument3 pages1 Tutorial - Concurrent ForcesJeanelle ArpaNo ratings yet
- Shaft WorkDocument20 pagesShaft WorkEdward MorganNo ratings yet
- Mechanics Virtual Work Kaleem Arif PDFDocument20 pagesMechanics Virtual Work Kaleem Arif PDFKaleem's Corner100% (1)