You might also like
- Air foam chamber data sheetDocument1 pageAir foam chamber data sheetPinjala AnoopNo ratings yet
- Points For Discussion During Training of Distillation Techniques, Operation & TroubleshootingDocument1 pagePoints For Discussion During Training of Distillation Techniques, Operation & TroubleshootingPinjala AnoopNo ratings yet
- Directional Valve Specification SheetDocument1 pageDirectional Valve Specification SheetPinjala AnoopNo ratings yet
- Data Sheet Co2 Cylinder AssemblyDocument2 pagesData Sheet Co2 Cylinder AssemblyPinjala AnoopNo ratings yet
- Plan 53 BDocument2 pagesPlan 53 BPinjala AnoopNo ratings yet
- 2 Phase Flow OrificeDocument14 pages2 Phase Flow OrificePinjala AnoopNo ratings yet
- Preparation of LC and LG ArrangementDocument13 pagesPreparation of LC and LG ArrangementPinjala AnoopNo ratings yet
- Data Sheet Discharge NozzleDocument1 pageData Sheet Discharge NozzlePinjala AnoopNo ratings yet
- Data Sheet Cylinder Rack & Piping ManifoldDocument1 pageData Sheet Cylinder Rack & Piping ManifoldPinjala Anoop100% (1)
- PSA User Meet - JaipurDocument2 pagesPSA User Meet - JaipurPinjala AnoopNo ratings yet
- Tank Mixing JGS 210-120-1-66E: ConfidentialDocument9 pagesTank Mixing JGS 210-120-1-66E: ConfidentialPinjala AnoopNo ratings yet
- t000001864 - Filename2 - Press Tender For NHT - CCR - 24.07.2009-fDocument88 pagest000001864 - Filename2 - Press Tender For NHT - CCR - 24.07.2009-fPinjala AnoopNo ratings yet
- Inline Mixing JGS 210-120-1-72E: ConfidentialDocument11 pagesInline Mixing JGS 210-120-1-72E: ConfidentialPinjala AnoopNo ratings yet
- General Considerations: Design PracticesDocument21 pagesGeneral Considerations: Design PracticesPinjala Anoop100% (1)
- 201906beaconenglish-Corrosion Under InsulationDocument1 page201906beaconenglish-Corrosion Under InsulationguhadebasisNo ratings yet
- Beacon - Corrosion Under InsulationDocument1 pageBeacon - Corrosion Under Insulationkave4923No ratings yet
- Process DescriptionDocument7 pagesProcess DescriptionPinjala AnoopNo ratings yet
- Safety Contact - Pipeline Bursted During HydrotestDocument1 pageSafety Contact - Pipeline Bursted During HydrotestPinjala AnoopNo ratings yet
- Standard Refinery Fuel TonsDocument2 pagesStandard Refinery Fuel TonsPinjala Anoop100% (4)
- Standard Refinery Fuel TonsDocument2 pagesStandard Refinery Fuel TonsPinjala AnoopNo ratings yet
- Centrifugal compressor surge control methodsDocument1 pageCentrifugal compressor surge control methodsPinjala AnoopNo ratings yet
- OISD 166 GuidelinesDocument50 pagesOISD 166 GuidelinesPinjala AnoopNo ratings yet
- Fccu IiDocument4 pagesFccu IiPinjala AnoopNo ratings yet
- Energy ConversionDocument16 pagesEnergy ConversionPinjala AnoopNo ratings yet
- DMS 16-12-2017Document6 pagesDMS 16-12-2017Pinjala AnoopNo ratings yet
- OISD Check List - 1Document5 pagesOISD Check List - 1Pinjala AnoopNo ratings yet
- DMS 06-04-2018Document59 pagesDMS 06-04-2018Pinjala AnoopNo ratings yet
- Name: Katakam Sandeep Reddy Mobile: 9704575353: ResumeDocument2 pagesName: Katakam Sandeep Reddy Mobile: 9704575353: ResumePinjala AnoopNo ratings yet
- QuizDocument6 pagesQuizPinjala AnoopNo ratings yet
- 3-AAP Analysis ReportDocument11 pages3-AAP Analysis ReportPinjala AnoopNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Clayton RajaDocument7 pagesClayton RajaSrinivasm SriniNo ratings yet
- Rotordynamic For Vertical PumpDocument14 pagesRotordynamic For Vertical PumpVgvr GvlsvNo ratings yet
- NH E135B Código de Erro MotorDocument27 pagesNH E135B Código de Erro MotorFernando SabinoNo ratings yet
- Nominal Performance: Hermetic Compressor Model: Aw 2495Zk-P BOM ID: 972-A1Document1 pageNominal Performance: Hermetic Compressor Model: Aw 2495Zk-P BOM ID: 972-A1Zikko FirmansyahNo ratings yet
- District Cooling: Efficiency Improvement in District Cooling System Using Direct CondensationDocument16 pagesDistrict Cooling: Efficiency Improvement in District Cooling System Using Direct CondensationIzah FriendsNo ratings yet
- Elasticity Ee PDFDocument13 pagesElasticity Ee PDFravi0% (1)
- Chapter 2 Rankine Cycle in EnglishDocument26 pagesChapter 2 Rankine Cycle in EnglishRahmandan HafidNo ratings yet
- Syngas Gas Train Schematic and Spare Parts ListDocument4 pagesSyngas Gas Train Schematic and Spare Parts ListShamshuddin TanekhanNo ratings yet
- Cane Shredder 2Document9 pagesCane Shredder 2Dirajen Pullay MardayNo ratings yet
- Rigid Pavement Thesis 3Document12 pagesRigid Pavement Thesis 3san htet aungNo ratings yet
- Dehumidifcation and CoolingDocument3 pagesDehumidifcation and CoolingWaleed A. ShreimNo ratings yet
- MIG Welding: A Seminar Report On byDocument12 pagesMIG Welding: A Seminar Report On bybmkaleNo ratings yet
- Fisher Control Valve Sourcebook - Power and Severe ServiceDocument220 pagesFisher Control Valve Sourcebook - Power and Severe Servicemtrj59No ratings yet
- Fluid and Fluid PropertiesDocument42 pagesFluid and Fluid PropertiesCIPETIPT Tool RoomNo ratings yet
- ChEg4124-Chap-3 (P-1)Document46 pagesChEg4124-Chap-3 (P-1)Yonas TarekegnNo ratings yet
- Built Up SectionsDocument2 pagesBuilt Up Sectionslisan2053No ratings yet
- A Mechanical Engineer S Handbook by ONGC PDFDocument303 pagesA Mechanical Engineer S Handbook by ONGC PDFshujad77No ratings yet
- 003 001 Brasz 2003Document109 pages003 001 Brasz 2003Anonymous YBTHsR24U4No ratings yet
- API-653 Now Permits Lap-Welded Patch Plates For Shell Repairs - Carmagen EngineeringDocument2 pagesAPI-653 Now Permits Lap-Welded Patch Plates For Shell Repairs - Carmagen Engineeringmohsen_267100% (1)
- MC 10172225 0001Document9 pagesMC 10172225 0001Abdelmoumen BenharzallahNo ratings yet
- Service Kit: Single EngineDocument6 pagesService Kit: Single EngineKJ DhimanNo ratings yet
- WegaconceptDocument76 pagesWegaconceptSvitaho ImportNo ratings yet
- Assignment 2 Ch2 3Document10 pagesAssignment 2 Ch2 3Zuhairi ZakariaNo ratings yet
- Thermal Physics - DPP 11 of (Lec 23) - Saakaar Batch For IIT JAM PhysicsDocument3 pagesThermal Physics - DPP 11 of (Lec 23) - Saakaar Batch For IIT JAM PhysicsAnkur TiwariNo ratings yet
- Aerodynamic Ground EffectDocument12 pagesAerodynamic Ground EffectLev SorkinNo ratings yet
- HP237Document20 pagesHP237Asif HameedNo ratings yet
- TAPPI TIP-0402-27 Continuous Dig Insp Rev 2005Document11 pagesTAPPI TIP-0402-27 Continuous Dig Insp Rev 2005a_parrat100% (2)
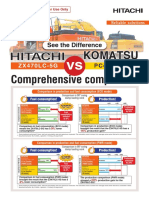
- ZX470-5G Vs Komatsu PC400-8Document3 pagesZX470-5G Vs Komatsu PC400-8Sohibul AminNo ratings yet
- B149.03 02-En PDFDocument4 pagesB149.03 02-En PDFIndra MishraNo ratings yet