You might also like
- Diff BWT Is 800 101Document96 pagesDiff BWT Is 800 101tops123No ratings yet
- Snag ListDocument1 pageSnag ListsskamalakannanNo ratings yet
- Technologies 05 00081Document13 pagesTechnologies 05 00081B.A HNo ratings yet
- One Day Seminar On Affordable Housing For AllDocument46 pagesOne Day Seminar On Affordable Housing For AllPradeepNo ratings yet
- Fabrication VideosDocument1 pageFabrication VideossskamalakannanNo ratings yet
- Basic Wind Speed Map of India With Long-Term Hourl PDFDocument13 pagesBasic Wind Speed Map of India With Long-Term Hourl PDFTakhtani VishvashNo ratings yet
- S. No Description / Part Mark Size Qty Length (M) Width (M) Column - Type 1 Unit WT (KG) Weight / No (KG) No of Items Thickness (MM)Document2 pagesS. No Description / Part Mark Size Qty Length (M) Width (M) Column - Type 1 Unit WT (KG) Weight / No (KG) No of Items Thickness (MM)sskamalakannanNo ratings yet
- JSW WebinarDocument3 pagesJSW WebinarsskamalakannanNo ratings yet
- JSW WebinarDocument3 pagesJSW WebinarsskamalakannanNo ratings yet
- Steel To Concrete Joints Design-Manual II enDocument292 pagesSteel To Concrete Joints Design-Manual II enSujeevan Tharmakulasingam100% (2)
- S. No Description / Part Mark Size Qty Length (M) Width (M) Column - Type 1 Unit WT (KG) Weight / No (KG) No of Items Thickness (MM)Document2 pagesS. No Description / Part Mark Size Qty Length (M) Width (M) Column - Type 1 Unit WT (KG) Weight / No (KG) No of Items Thickness (MM)sskamalakannanNo ratings yet
- BASEPLT9Document27 pagesBASEPLT9Homero Silva100% (3)
- Base Plate Design CalculationDocument1 pageBase Plate Design CalculationsskamalakannanNo ratings yet
- S. No Description / Part Mark Size Qty Length (M) Width (M) Column - Type 1 Unit WT (KG) Weight / No (KG) No of Items Thickness (MM)Document2 pagesS. No Description / Part Mark Size Qty Length (M) Width (M) Column - Type 1 Unit WT (KG) Weight / No (KG) No of Items Thickness (MM)sskamalakannanNo ratings yet
- Australia Isolation Rooms 2007Document48 pagesAustralia Isolation Rooms 2007jonathan_carretasNo ratings yet
- STeelDesign-Slender Sections PDFDocument3 pagesSTeelDesign-Slender Sections PDFsskamalakannanNo ratings yet
- All Page PDFDocument24 pagesAll Page PDFsskamalakannanNo ratings yet
- Crane Design Basics Webpage Provides IntroductionDocument13 pagesCrane Design Basics Webpage Provides IntroductionAnandh PsNo ratings yet
- Bolt TableDocument1 pageBolt TableErebert C. CaracasNo ratings yet
- British Steel Sections Properties3Document48 pagesBritish Steel Sections Properties3sskamalakannanNo ratings yet
- Is SP 64 2001 PDFDocument125 pagesIs SP 64 2001 PDFRamesh Subramani RamachandranNo ratings yet
- Analysis and Design of PEB Using IS800 and International StandardDocument5 pagesAnalysis and Design of PEB Using IS800 and International StandardPratik R. AtwalNo ratings yet
- Translated Version of RalDocument31 pagesTranslated Version of RalsskamalakannanNo ratings yet
- Psha ExampleDocument42 pagesPsha ExampleengartNo ratings yet
- Weight CHKDocument2 pagesWeight CHKsskamalakannanNo ratings yet
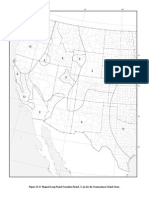
- Mapped Long-Period Transition Period USDocument2 pagesMapped Long-Period Transition Period USNoore Alam SarkarNo ratings yet
- ACI-315-Detailing of Concrete StructuresDocument2 pagesACI-315-Detailing of Concrete StructuressskamalakannanNo ratings yet
- ASCE710E1Document40 pagesASCE710E1sskamalakannanNo ratings yet
- Asce 7-10Document20 pagesAsce 7-10Julio OrozcoNo ratings yet
- Seismic Load Analysis for Steel Building Design Case StudyDocument3 pagesSeismic Load Analysis for Steel Building Design Case Studyintimate4lifeNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Objective QuestionsDocument19 pagesObjective QuestionsDeepak SharmaNo ratings yet
- Saes H 201Document9 pagesSaes H 201heartbreakkid132No ratings yet
- Silicon ManufacturingDocument132 pagesSilicon ManufacturingAndrea SottocornolaNo ratings yet
- ECE Laws and Ethics NotesDocument29 pagesECE Laws and Ethics Notesmars100% (1)
- Small Healthcare Organization: National Accreditation Board For Hospitals & Healthcare Providers (Nabh)Document20 pagesSmall Healthcare Organization: National Accreditation Board For Hospitals & Healthcare Providers (Nabh)Dipti PatilNo ratings yet
- Adopt 2017 APCPI procurement monitoringDocument43 pagesAdopt 2017 APCPI procurement monitoringCA CANo ratings yet
- Inventory ManagementDocument60 pagesInventory Managementdrashti0% (1)
- EMI: English As A Medium of Instruction: A New Methodology To Teach English As A Foreign LanguageDocument18 pagesEMI: English As A Medium of Instruction: A New Methodology To Teach English As A Foreign Languagepaola suarezNo ratings yet
- Scedule Maintenance KBN Mill 2020Document9 pagesScedule Maintenance KBN Mill 2020slamet supriyadiNo ratings yet
- WORK ORDER TITLEDocument2 pagesWORK ORDER TITLEDesign V-Tork ControlsNo ratings yet
- Teodorico M. Collano, JR.: ENRM 223 StudentDocument5 pagesTeodorico M. Collano, JR.: ENRM 223 StudentJepoyCollanoNo ratings yet
- Penomoran Bantex - K64&COMPDocument8 pagesPenomoran Bantex - K64&COMPVigour Rizko MurdyneNo ratings yet
- DLP Din8Document2 pagesDLP Din8KOUDJIL MohamedNo ratings yet
- Confirmation Form: Pillar Regional Conference (NCR)Document1 pageConfirmation Form: Pillar Regional Conference (NCR)Llano Multi-Purpose CooperativeNo ratings yet
- AWS D1.5 PQR TitleDocument1 pageAWS D1.5 PQR TitleNavanitheeshwaran SivasubramaniyamNo ratings yet
- CHB1 Assignmen5Document2 pagesCHB1 Assignmen5anhspidermenNo ratings yet
- Destination Phrasal Verbs @destination - b1 - b2 - c1Document25 pagesDestination Phrasal Verbs @destination - b1 - b2 - c1Samira GulomovaNo ratings yet
- CLOZE TEST Fully Revised For SSC, Bank Exams & Other CompetitiveDocument57 pagesCLOZE TEST Fully Revised For SSC, Bank Exams & Other CompetitiveSreenu Raju100% (2)
- Excel Data AnalysisDocument30 pagesExcel Data AnalysisРоман УдовичкоNo ratings yet
- Adverb Affirmation Negation LessonDocument4 pagesAdverb Affirmation Negation LessonMire-chan Bacon100% (1)
- Smell Detectives: An Olfactory History of Nineteenth-Century Urban AmericaDocument35 pagesSmell Detectives: An Olfactory History of Nineteenth-Century Urban AmericaUniversity of Washington PressNo ratings yet
- How To Approach To Case Study Type Questions and MCQsDocument4 pagesHow To Approach To Case Study Type Questions and MCQsKushang ShahNo ratings yet
- Movement Joints (NHBC)Document5 pagesMovement Joints (NHBC)hemendraengNo ratings yet
- Be3000 Manual 2016Document77 pagesBe3000 Manual 2016Itzel JuárezNo ratings yet
- Ziva RWW ManuscriptDocument3 pagesZiva RWW ManuscriptroderunnersdNo ratings yet
- Ninja's Guide To OnenoteDocument13 pagesNinja's Guide To Onenotesunil100% (1)
- Electromagnetic Braking SystemDocument14 pagesElectromagnetic Braking SystemTanvi50% (2)
- wt-and-fds-practical-slipsDocument32 pageswt-and-fds-practical-slipsRohidas SapkalNo ratings yet
- Mock PPT 2023 TietDocument22 pagesMock PPT 2023 Tiettsai42zigNo ratings yet
- CommunicationDocument5 pagesCommunicationRyan TomeldenNo ratings yet