Professional Documents
Culture Documents
Regulacion Automatica 1
Uploaded by
edgar1707Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Regulacion Automatica 1
Uploaded by
edgar1707Copyright:
Available Formats
1 Introduccin
Los sistemas automticos de mando, control y regulacin desempean un papel muy importante dentro del conjunto de los sistemas industriales. Muchos desarrollos ni siquiera son posibles sin reguladores eficientes, desde los comienzos de la Revolucin Industrial (por ejemplo, el regulador centrfugo de la mquina de vapor de Watt) hasta nuestros das (los ejemplos se multiplican: industrias qumicas, papeleras, siderurgias, sistemas de transporte, tcnicas aeroespaciales, procesos automticos de fabricacin, produccin de energa elctrica, etc. ). La teora de regulacin automtica ha incorporado mtodos originados en disciplinas ms o menos afines: especialmente en telecomunicaciones (amplificadores electrnicos en telefona, procesamiento de seales), pero tambin en mecnica celeste, anlisis de vibraciones, o tcnicas de optimizacin. En otra direccin, algunas tcnicas de anlisis desarrolladas inicialmente para sistemas industriales estn afectando tambin a campos aparentemente muy distintos: simulaciones con ordenador, modelos econmicos y dinmica de sistemas, modelos de organizacin y gestin. Todo ello configura una asignatura de Regulacin Automtica con tcnicas bsicas bien definidas, un campo enorme de aplicaciones y muchas relaciones con otras disciplinas. 1.1 Un ejemplo Se describen algunos de los temas fundamentales de la regulacin automtica a partir de un ejemplo, tomado de Shinskey (aunque el procedimiento de anlisis es distinto). Se seguirn, de forma simplificada, las etapas habituales: descripcin del sistema, modelado, anlisis y diseo; los anlisis y diseos presentan a su vez distintos aspectos.
REGULACIN AUTOMTICA
Descripcin Vase la Figura 1.1. La cantidad de arena que transporta una cinta es la variable controlada, y. Esta variable depende de la posicin de una vlvula que admite ms o menos arena de una tolva, que a su vez depende del voltaje aplicado a un sistema que mueve la vlvula; este voltaje es la variable de mando, u. Pero la cantidad de arena tambin depende de otras circunstancias no controladas, como por ejemplo el grado de humedad de la arena; se resumirn estas circunstancias en una variable de perturbacin, d. Precisamente la existencia de esta perturbacin es el motivo por el que no se puede mantener constante la variable controlada simplemente manteniendo constante la variable de mando. En lugar de intentar mantener tambin constantes todas las posibles perturbaciones, lo cual normalmente no es tcnicamente viable ni deseable, la regulacin emplea una tcnica de realimentacin. Esta consiste en medir la variable controlada, comparar esta medida con el valor deseado, que se introduce mediante una variable de referencia, r (que puede ser fija si siempre se desea la misma cantidad de arena, pero en el caso general se emplea para poder programar distintas cantidades), y deducir el mando a aplicar mediante una ley de control (normalmente muy sencilla) adecuada a los objetivos pretendidos, que se ajusta en la construccin del regulador.
r ( t) Regulador
Actuador u(t) Sensor y(t)
Figura 1.1 Esquema de un ejemplo de sistema de control Este esquema general es la base de la inmensa mayora de los sistemas de regulacin, desde el regulador de velocidad de una mquina de vapor de Watt hasta los ms modernos. En cambio, las tecnologas empleadas varan enormemente, tanto en el tiempo como segn las aplicaciones. El regulador de Watt es un sistema esencialmente mecnico, a base de ejes y varillas; todava se
8
1. INTRODUCCIN
emplean variantes del mismo para regular la velocidad de las turbinas de algunas centrales hidrulicas. En la industria petroqumica se ha empleado tecnologa neumtica hasta tiempos muy recientes. Los reguladores modernos son preponderantemente electrnicos; est completndose ahora la transicin de la electrnica analgica a la digital. Los sistemas de medida dependen, obviamente, de las magnitudes a medir; se tiende a uniformizar la naturaleza de su indicacin (tensin o corriente continuas proporcionales a la magnitud medida, o bien codificacin digital). En el ejemplo, un sensor de cuarzo piezoelctrico puede dar un voltaje proporcional a la presin ejercida por la arena. Igualmente es necesario un sistema para traducir la variable de mando proporcionada por el regulador a una apertura o cierre gradual de la vlvula; este sistema, denominado actuador, parte tpicamente de un motor elctrico o hidrulico, incorporando muchas veces realimentacin a su vez, por lo que puede ser considerado un sistema de control dentro de otro sistema de control. Modelo Para analizar o disear sistemas de control es preciso disponer de algn modelo matemtico de las relaciones entre las variables definidas anteriormente, tanto para el sistema controlado (denominado comnmente planta), como del medidor, regulador y actuador. Por motivos que resultarn enseguida aparentes, este modelo debe incluir tanto las relaciones estticas (es decir, las que se dan cuando se supone que las magnitudes son constantes en el tiempo), como las dinmicas. Se establece para el ejemplo un modelo muy sencillo, en el que se desprecian o simplifican muchos posibles efectos, pero suficiente para ilustrar la problemtica tpica del control. Este modelo se resume en las siguientes ecuaciones: Planta: x(t ) = u (t ) d (t ) y (t ) = x(t ) Regulador proporcional : u (t ) = K P e(t ) = K P [ r (t ) y (t )] Para representar estas mismas ecuaciones, se usar frecuentemente un procedimiento grfico denominado diagrama de bloques. Se incluye en la Figura 1.2, para futuras relecturas; vanse las definiciones en el captulo 2.
r(t) -
e(t)
KP
u(t)
d(t) - x(t)
e-s
y(t)
Figura 1.2 Diagrama de bloques de un modelo del sistema de control
9
REGULACIN AUTOMTICA
La cantidad de arena x(t) que admite la vlvula depende linealmente de la variable de mando u(t); se han tomado unidades correspondientes, o magnitudes unitarias (1 corresponde a la cantidad de arena nominal, cerca del mximo, y a la apertura de vlvula que la produce en condiciones nominales de perturbacin 0), para reducir a 1 la constante de proporcionalidad. Se aade el efecto de las perturbaciones (el modelado de la naturaleza de las perturbaciones puede tambin ser un tema importante); se supone establecido por distintas mediciones que d(t) vara entre 0,2. La variable controlada y(t) es en rgimen esttico igual a x(t). Pero en rgimen dinmico hay que tener en cuenta que existe un retardo en el tiempo, , determinado por la distancia entre vlvula y sensor, y la velocidad de la cinta. Por ltimo, se supone una medida perfecta y un regulador proporcional: u(t) es sencillamente proporcional, con constante a establecer KP, a la diferencia entre el valor de referencia y el valor efectivo de la variable controlada. Anlisis esttico Si se supone que todas las variables son constantes en el tiempo, la ecuacin dinmica se reduce a la ecuacin esttica: y=x Eliminando las variables u, x, se obtiene la salida y en funcin de las entradas r, d: y=r KP 1 d 1+ KP 1+ KP
Por tanto, la influencia de la perturbacin d sobre la variable controlada y se disminuye en un factor 1 + KP: si KP es elevado puede disminuirse enormemente. Este efecto se debe a que la variable de mando compensa (parcialmente) el efecto de las perturbaciones, siendo tanto ms sensible a pequeas variaciones de la salida cuanto mayor sea KP. Por otra parte, si KP es elevado y ser prcticamente igual a r. Anlisis dinmico; estabilidad Este curso proporcionar un conjunto adecuado de herramientas para efectuar este anlisis. En este captulo ser suficiente simular el comportamiento en el tiempo para un nmero limitado de situaciones. Como el modelo es muy simple, es posible realizar esta simulacin sin ayuda de programas de ordenador.
10
1. INTRODUCCIN
Supngase r(t) =1, d(t) =0. Se simular a partir de t =0 con y(t<0) =0. Para distintos valores de KP se obtienen las respuestas indicadas en la Figura 1.3. Se ha tomado el retardo como unidad de tiempo.
Kp=1/2
0.6 0.4 0.4 0.2 0 0 2 4 6 8 0.2 0 2 4 6 8 0.6
Kp=1/2
Respuesta y(t)
1
Respuesta u(t) Kp=1
1
Kp=1
0.5
0.5
0 0 2 4 6 8
0 0 2 4 6 8
Kp=2
100 0 -100 -200 0 2 4 6 8 400 200 0 -200 0 2
Kp=2
Tiempo
Tiempo
Figura 1.3 Simulacin de distintas respuestas o KP =1/2 El valor de y(t) tiende al rgimen esttico calculado anteriormente, 1/3 o KP =1 No se alcanza el rgimen esttico; la respuesta oscila entre dos valores. o KP =2 La respuesta oscila con valores crecientes. En el sistema real, se alcanzan rpidamente lmites de las variables ( la cantidad de arena no puede pasar de cierto valor, ni ser negativa); el modelo establecido no incluye estos lmites, por lo que no puede reproducirlos, pero indica suficientemente que el control no es adecuado, ya que la respuesta dinmica no tiende hacia el rgimen esttico.
11
REGULACIN AUTOMTICA
Sin herramientas de anlisis deberan repetirse las simulaciones para muchos ms casos; usando las tcnicas adecuadas, que se vern en el captulo 6, puede demostrarse que el modelo es inestable para KP 1. El diseo como compromiso entre estabilidad y precisin El anlisis esttico indica que es deseable ajustar valores elevados de KP, para acercarse a una situacin ideal, en la que la variable controlada sigue a la referencia, y las perturbaciones no producen ningn efecto: y=r. Pero el anlisis dinmico indica que ello no es posible, porque la respuesta dinmica no converge hacia la esttica. Teniendo en cuenta estas restricciones, debera ajustarse KP =0,9? Ello sera poco razonable por dos motivos distintos, aunque relacionados: - Poca robustez. Es importante recordar que el anlisis parte de un modelo del sistema real. Pequeas imprecisiones en el modelado (actuador o medidor no ideales, constantes de la planta variables o imperfectamente estimadas, etc.) pueden conducir a un sistema inestable, aunque el modelo sea estable. - Poco amortiguamiento. La respuesta transitoria sufre muchas oscilaciones, aunque convergen al rgimen esttico. Una regla poco refinada, pero frecuentemente empleada en la prctica por su sencillez, establece un valor de KP inferior a la mitad del que produce inestabilidad; puede tomarse KP =1/2 en este ejemplo.
Anlisis dinmico: amortiguamiento y rapidez El anlisis dinmico debe asegurar que el sistema, adems de ser estable, tiene respuestas que convergen al rgimen esttico sin excesivas oscilaciones y de forma suficientemente rpida. Diversas tcnicas de anlisis permiten obtener indicaciones sobre los conceptos de amortiguamiento y rapidez (que son muy tiles, pero no tienen una definicin estricta). De esta forma puede reducirse bastante el nmero de simulaciones necesarias, aunque muchas veces no es posible prescindir de ellas, especialmente si se desea comprobar el efecto de relaciones no lineales. Diseo: otras leyes de control En este ejemplo, el control proporcional no conduce a un compromiso adecuado: con KP =1/2, el efecto de las perturbaciones en rgimen esttico es todava 2/3 del efecto original. De hecho, un sistema cuyo efecto dinmico predominante sea un retardo es difcil de controlar, porque hay un retraso permanente en la
12
1. INTRODUCCIN
informacin que maneja el sistema de control; pero el control proporcional es vlido para otros sistemas ms fciles. Por otra parte, el control proporcional es nicamente una de las leyes de control posibles. Supngase ahora, con la misma planta: 1t Regulador integral : u (t ) = [ r (t ) y (t )] d t I0 Este regulador puede realizarse sencillamente mediante un regulador electrnico con amplificadores operacionales, y tambin de muchas otras formas (aunque sean aproximadas). I es el tiempo de integracin, ajustable. En rgimen esttico, u solamente puede ser constante si: y=r que coincide con el comportamiento ideal, para cualquier valor de I. El anlisis del rgimen dinmico por simulacin manual es ahora mucho ms laborioso que antes, por lo que todava son ms necesarias las tcnicas de 2 anlisis. El modelo resulta inestable para valores pequeos de I: I . Valores grandes de I conducen a sistemas excesivamente lentos, por lo que debe establecerse un compromiso. Ver el Problema P1.1. 1.2 Contenido de la asignatura A partir del ejemplo anterior, pueden resumirse los tipos generales de conocimientos necesarios para la realizacin completa de un sistema de control: A. Estudio y modelado de la planta. Este estudio no puede, obviamente, acometerse desde una nica asignatura, a no ser restringiendo enormemente el campo de aplicacin. En general, sera deseable que distintas asignaturas incluyeran temas sobre modelado dinmico de los sistemas que les afectan; frecuentemente los modelos presentados son exclusivamente estticos. B. Sistemas de medida, en el doble aspecto de captacin de las magnitudes a medir y condicionamiento posterior de las seales. Asignaturas de medidas elctricas y mecnicas, y de electrnica, cubren distintos temas de inters. C. Reguladores. La primera tarea consiste en el anlisis, diseo y ajuste de las acciones de control a realizar sobre la planta a partir de la informacin suministrada por las medidas. D. Realizacin fsica del regulador. Una vez establecido el regulador deseado, debe acometerse su construccin. En la actualidad se usa frecuentemente
13
REGULACIN AUTOMTICA
tecnologa electrnica (analgica o digital); pero tambin ocasionalmente, y en muchos reguladores antiguos, pero que funcionan perfectamente hoy, sistemas mecnicos, elctricos, neumticos o hidrulicos. E. Actuadores. Constituyen el nexo entre el regulador y la planta, sobre todo cuando es preciso suministrar cierta potencia. Muchas veces constituyen por derecho propio un sistema de control (por ejemplo, un servomecanismo para mover una vlvula de mando de acuerdo con la seal procedente del regulador). La tecnologa es normalmente electromecnica o hidrulica. Su modelo puede incluirse en los puntos A) o D). Las aportaciones especficas de la asignatura de regulacin automtica se centran en los contenidos reflejados en el punto C): anlisis y diseo de acciones de control. Pero se intentar presentar tambin una visin, aun necesariamente muy incompleta, del resto de los puntos, as como de la integracin del conjunto. 1.3 Este libro El objetivo central de este libro es el de resumir las ideas y desarrollos de la asignatura, liberando a los alumnos de la tarea de tomar apuntes exhaustivos en clase, para que puedan captar y discutir mejor las explicaciones del profesor. Debe constituir tambin una referencia rpida de los principales resultados; por ello muchas demostraciones se esbozan nicamente, o se omiten del todo. Por otra parte un libro standard de texto, de los que hay varios buenos, proporciona bastante ms material de estudio, especialmente si se busca una demostracin especfica, descripciones ms extensas y detalladas, ejemplos ms completos, etc. Debemos por tanto aconsejar al alumno que se haga con algn texto de similar contenido; se recomienda Nise. La asignatura puede dividirse en dos partes; pero se insistir en establecer relaciones entre estas partes, de manera que formen un todo coherente. La primera parte, Funcin de transferencia y respuesta temporal, incluye los captulos 1 al 4, presentando los problemas y los mtodos del control en un curso abreviado basado exclusivamente en tcnicas de respuesta temporal. En 1 se ha introducido, mediante un ejemplo, la problemtica general de los sistemas de control. En 2 se establecen las tcnicas matemticas necesarias, basadas en la transformacin de Laplace y el concepto de funcin de transferencia, as como los diagramas de bloques. En 3 se plantean los problemas de control bsicos de seguimiento y regulacin, aplicndolos al estudio de la precisin en rgimen permanente, con una breve introduccin a temas de robustez. En 4 se estudian modelos sencillos de sistemas (de primer y segundo orden), ilustrando los conceptos bsicos de amortiguamiento y rapidez. Los modelos de segundo orden permiten realizar diseos ya realistas de algunos sistemas de control.
14
1. INTRODUCCIN
La segunda parte, Respuesta en frecuencia y diseo de controles, incluye los captulos 5 al 8. Las tcnicas de respuesta en frecuencia son una importante alternativa a las tcnicas de respuesta temporal; aunque es posible disear con exclusin de una de ellas, ambas se refuerzan y complementan notablemente. Tambin creemos que su potencia y versatilidad compensan sobradamente el mayor grado de abstraccin requerido inicialmente En 5 se introducen los conceptos ms bsicos, tomando pie del estudio de los sistemas de primer y segundo orden y subrayando las relaciones entre respuesta temporal y respuesta en frecuencia. En 6 se resumen tcnicas algebraicas y de respuesta en frecuencia en orden al estudio de la estabilidad, central en la teora de control. En 7 se describen las tcnicas bsicas de anlisis y diseo, poniendo nfasis en las relaciones lazo abierto - lazo cerrado e insistiendo en las relaciones entre respuesta temporal y respuesta en frecuencia. En 8 se profundiza el diseo de distintos tipos de controles. Los 6 apndices resumen tablas y frmulas, presentan un modelo de servomecanismo e introducen otros temas tiles, como las aproximaciones de un retardo y aspectos tecnolgicos de los reguladores PID. 1.4 Bibliografa Se ha recomendado como texto de consulta Nise. Incluye la tcnica del lugar de las races, importante complemento a las tcnicas de respuesta en frecuencia, y tambin material interesante sobre la aplicacin al control de las tcnicas de variables de estado, as como una introduccin al control digital. Pueden tambin usarse como consulta Franklin, Dorf, Ogata, DAzzo, Kuo. Una panormica muy extensa y bastante accesible de las tcnicas actuales de control puede encontrarse en Dutton. Otros libros de esta bibliografa se irn mencionando en los sucesivos captulos. strm, Hgglund. PID Controllers: Theory, Design and Tuning. 2nd Edition. Instrument Society of America, 1995 DAzzo, Houpis. Sistemas realimentados de control (anlisis y sntesis). Paraninfo, 1970. DiStefano III, Stubberud, Williams. Retroalimentacin y sistemas de control. Schaum, Mc Graw-Hill, 1972. Dorato. Analytic Feedback System Design. Brooks/Cole 2000 Dorf. Sistemas modernos de control. Addison-Wesley, 1989. Dutton, Thompson, Barraclough. The art of control engineering. AddisonWesley, 1997.
15
REGULACIN AUTOMTICA
Franklin, Powell, Emami-Naeini. Control de sistemas dinmicos con retroalimentacin. Addison-Wesley Iberoamericana, 1991. Gille, Decaulne, Plegrin. Servosistemas. Teora y Clculo. Paraninfo, 1967. James, Nichols, Phillips. Theory of Servomechanisms. Mc Graw-Hill, 1947. Kuo. Sistemas automticos de control. CECSA, 1973. Kwakernaak, Sivan. Linear Optimal Control Systems. Wiley and Sons, 1972. Lathi. Signals, Systems and Communication. Wiley and Sons, 1965. Nicholson (Ed). Modelling of Dynamical Systems, Vols. I, II. Peter Peregrinus, 1980. Nise. Control Systems Engineering. Benjamin and Cummings, 1995 Ogata. Ingeniera de control moderna. Prentice-Hall Internacional, 1974. Pagola, Zazo. Introduccin a los Sistemas Dinmicos. UPCo, 1997. Phillips. Funciones de variable compleja. Dossat, 1963. Shinskey. Process Control Systems. Application, Design and Tuning. Mc GrawHill, 1988. Thaler (Ed). Automatic Control. Classical Linear Theory. Dowden, Hutchinson & Ross, 1974 Truxal. Automatic Feedback Control System Synthesis. Mc Graw-Hill, 1955. PROBLEMAS P1.1 Simular las respuestas del ejemplo con control integral, en las mismas condiciones de 1.1. Tomar el retardo como unidad de tiempo, y los valores I = 0,1 ; ; 10
16
You might also like
- Caracterización Del LocalDocument7 pagesCaracterización Del LocalAbraham Alarcón López100% (2)
- Mec 213Document2 pagesMec 213juan challcoNo ratings yet
- Guia de Conduccion y Conveccion - Orieta LopezDocument2 pagesGuia de Conduccion y Conveccion - Orieta LopezFelipe Eduardo Guzmán SilvaNo ratings yet
- Ensayo de TorsiónDocument11 pagesEnsayo de Torsiónalvaro rodriguezNo ratings yet
- Ejercicios Resueltos, Aplicando BernoulliDocument4 pagesEjercicios Resueltos, Aplicando BernoulliAyleen Lopez100% (2)
- Informe de Resalto HidrualicoDocument19 pagesInforme de Resalto HidrualicoPaul Janco TorrejonNo ratings yet
- 3 Losas2DireccionesDocument37 pages3 Losas2Direccionesyeny cuevaNo ratings yet
- Electricista NavalDocument10 pagesElectricista NavalJorge BoaglioNo ratings yet
- Informe de MétodosDocument27 pagesInforme de MétodosEstudiante INGNo ratings yet
- 01 Fisica - Analisis DimensionalDocument6 pages01 Fisica - Analisis DimensionalChristian RodriguezNo ratings yet
- Fuerza IntermolecularDocument9 pagesFuerza IntermolecularOmar GaliciaNo ratings yet
- Problemario MartinezDianaDocument20 pagesProblemario MartinezDianaDianaMartinezNo ratings yet
- Ejercicios 2,3,4 - Jhon - Fredy - BuitragoDocument16 pagesEjercicios 2,3,4 - Jhon - Fredy - BuitragoKarol Danitza Aguirre NovaNo ratings yet
- Informe 6Document3 pagesInforme 6SusumaireNo ratings yet
- Tema 1 Proteccion RadiologicaDocument67 pagesTema 1 Proteccion RadiologicaLaura Gonzalez Prieto0% (1)
- Tipos de EnergíaDocument3 pagesTipos de EnergíaAndrea VazquezNo ratings yet
- Conductividad de Los ElectrolitosDocument57 pagesConductividad de Los ElectrolitosXaulo Del Rosario LecarosNo ratings yet
- Trabajo Mecánica de VueloDocument9 pagesTrabajo Mecánica de VueloDaanieel GutierrezNo ratings yet
- CaracterizacionDeFlujoBifasicoCaidaDePresionTransf 4811275 PDFDocument16 pagesCaracterizacionDeFlujoBifasicoCaidaDePresionTransf 4811275 PDFAnonymous iq65ROYtNo ratings yet
- Clase 2 Tabla PeriodicaDocument13 pagesClase 2 Tabla PeriodicaVanesa QuinterosNo ratings yet
- Ejercicios T.4. Campo EléctricoDocument6 pagesEjercicios T.4. Campo EléctricoiretchaiNo ratings yet
- CURVASDocument5 pagesCURVASDiego Ashtu SosaNo ratings yet
- Teoría de Los Variadores de VelocidadDocument59 pagesTeoría de Los Variadores de VelocidadEmilio Bonnet100% (1)
- Controlador PidDocument33 pagesControlador PidAaron Jimenez Chavez100% (1)
- 1 Constante Elastica Ley de Hooke PDFDocument6 pages1 Constante Elastica Ley de Hooke PDFandreNo ratings yet
- Armonicos y Seccion Del NeutroDocument2 pagesArmonicos y Seccion Del NeutrodardoNo ratings yet
- Actividad Fase 3Document19 pagesActividad Fase 3kevin narvaez henriquezNo ratings yet
- Qué Es La FísicaDocument2 pagesQué Es La FísicaDaniela GómezNo ratings yet
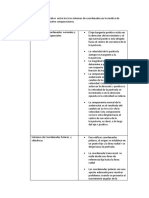
- Cuadro ComparativoDocument2 pagesCuadro Comparativolaura señasNo ratings yet