You might also like
- Onken ReportDocument17 pagesOnken ReportShaoyu WangNo ratings yet
- Robo-Sloth: A Rope-Climbing RobotDocument10 pagesRobo-Sloth: A Rope-Climbing RobotmatitotbuNo ratings yet
- Advance Roving Device For Rescue OperationDocument35 pagesAdvance Roving Device For Rescue OperationArun Kumar YadavNo ratings yet
- The Perfect Corner 2: A Driver's Step-by-Step Guide to Optimizing Complex Sections Through the Physics of RacingFrom EverandThe Perfect Corner 2: A Driver's Step-by-Step Guide to Optimizing Complex Sections Through the Physics of RacingNo ratings yet
- Ballari Institute of Technology & Management: Fabrication of Kinematic WalkerDocument21 pagesBallari Institute of Technology & Management: Fabrication of Kinematic Walkerpavanchowdary PcNo ratings yet
- Robot 3D Printed WalkingDocument18 pagesRobot 3D Printed WalkingWilliam VenegasNo ratings yet
- 2Document16 pages2viduraNo ratings yet
- Six Leg Kinematic Moving MachineDocument12 pagesSix Leg Kinematic Moving MachineShubham Bonde100% (1)
- Amphibian BOT: Team MembersDocument22 pagesAmphibian BOT: Team MembersFrancis MFANo ratings yet
- Research PPR Electric ScooterDocument4 pagesResearch PPR Electric ScooterRachit GuptaNo ratings yet
- The AQUA ProjectDocument36 pagesThe AQUA ProjectParvez KhanNo ratings yet
- Axe RobotDocument6 pagesAxe RobotJhonatan Alexander Becerra DuitamaNo ratings yet
- GaitreplicatorrobotDocument32 pagesGaitreplicatorrobotapi-300379218No ratings yet
- Vex Robotics For Beginners: Modesto Jr. College Summer 2008Document21 pagesVex Robotics For Beginners: Modesto Jr. College Summer 2008Vipul JainNo ratings yet
- Tutorial 1Document8 pagesTutorial 1Sudheshnan T SudheshNo ratings yet
- DesignreviewiipaperDocument26 pagesDesignreviewiipaperapi-314103080No ratings yet
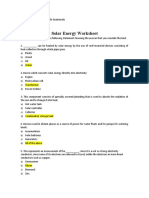
- Solar Energy Worksheet: Instructions: Complete The Following Statement Choosing The Answer That You Consider The BestDocument4 pagesSolar Energy Worksheet: Instructions: Complete The Following Statement Choosing The Answer That You Consider The BestCarlos SanchezNo ratings yet
- "ROCKER BOGIE SUSPENSION SYSTEM" Ijariie5476Document6 pages"ROCKER BOGIE SUSPENSION SYSTEM" Ijariie5476Kanna MonishNo ratings yet
- Engineering Design: All Terrain Carriage For CasualtiesDocument20 pagesEngineering Design: All Terrain Carriage For CasualtiesSANKALP GHARMALKARNo ratings yet
- Project in MD Lab - 1Document8 pagesProject in MD Lab - 1Art Angel GingoNo ratings yet
- Deformable Wheel Robot Based On Origami StructureDocument6 pagesDeformable Wheel Robot Based On Origami Structuresanket jainNo ratings yet
- Auvsi Roboboat Competition 2011: Cedarville UniversityDocument8 pagesAuvsi Roboboat Competition 2011: Cedarville Universitym_scribd_2010No ratings yet
- Autonomous Control and Implementation of Coconut Tree ClimbingDocument12 pagesAutonomous Control and Implementation of Coconut Tree ClimbingPebriu PratamaNo ratings yet
- Roboclimber: MCL211 Design of Machines Final SubmissionDocument33 pagesRoboclimber: MCL211 Design of Machines Final SubmissionNavneet GoyalNo ratings yet
- Report On Workshop Mini ProjectDocument5 pagesReport On Workshop Mini ProjectSajad KhanNo ratings yet
- Robotic Landmine Detector Final ReportDocument18 pagesRobotic Landmine Detector Final ReportS Bharadwaj Reddy100% (1)
- Kachow Finaldesignreport-1Document19 pagesKachow Finaldesignreport-1api-541885234No ratings yet
- Design Project - Final Report (Modified)Document17 pagesDesign Project - Final Report (Modified)maria_santhosh_inigoNo ratings yet
- RC 10 Team CarDocument8 pagesRC 10 Team Carvintagerccar100% (1)
- Micro MouseDocument9 pagesMicro Mousesammir135No ratings yet
- Deformable-Wheel Robot Based On Soft MaterialDocument7 pagesDeformable-Wheel Robot Based On Soft Materialchutiya chamanNo ratings yet
- Final Report On ARMDocument21 pagesFinal Report On ARMnitish1435No ratings yet
- Robotic Gripper DesignDocument4 pagesRobotic Gripper Designengr_faheemNo ratings yet
- Analysis of Perseverance Rover's WheelsDocument12 pagesAnalysis of Perseverance Rover's WheelsNouman Aqil100% (1)
- R - 09 - Robots Page9 PDFDocument5 pagesR - 09 - Robots Page9 PDFstraf238No ratings yet
- JETIR1906Y23Document5 pagesJETIR1906Y23Team LegendsNo ratings yet
- Design and Optimization of A Mars Rover's Rocker-Bogie MechanismDocument6 pagesDesign and Optimization of A Mars Rover's Rocker-Bogie MechanismKanna MonishNo ratings yet
- Foot Steered TricycleDocument17 pagesFoot Steered TricycleLeo BoyNo ratings yet
- Tri WheelDocument6 pagesTri WheelAminul HoqueNo ratings yet
- Ijet17 09 03 206 PDFDocument8 pagesIjet17 09 03 206 PDFNasir AhsanNo ratings yet
- Autocad ProjectDocument20 pagesAutocad ProjectRishav RakeshNo ratings yet
- Single Axis Solar Tracking System Using Microcontroller (ATmega328) and Servo MotorDocument4 pagesSingle Axis Solar Tracking System Using Microcontroller (ATmega328) and Servo MotorJASH MATHEWNo ratings yet
- AutomataDocument8 pagesAutomataDedyAjiRiyadiNo ratings yet
- Report Screw Jack (1) TDocument47 pagesReport Screw Jack (1) TAshish Sharma80% (5)
- Mathematical Modeling of An Omnidirectional Drive System For Robotic ApplicationsDocument6 pagesMathematical Modeling of An Omnidirectional Drive System For Robotic ApplicationsSergio LinNo ratings yet
- Baja India 2010 Design Report VAJRADocument8 pagesBaja India 2010 Design Report VAJRAPranav RawatNo ratings yet
- In This Course You Will Learn The FollowingDocument9 pagesIn This Course You Will Learn The FollowingNkugwa Mark WilliamNo ratings yet
- Chapter 15: An Easy-Build GeneratorDocument29 pagesChapter 15: An Easy-Build GeneratorGregEreNo ratings yet
- 4Document4 pages4api-4416352160% (2)
- Group L ReportDocument41 pagesGroup L ReportterebetNo ratings yet
- Ibot - Robotics Club of Iit Madras Tutorial 1.1.1 Build Your Basic BotDocument21 pagesIbot - Robotics Club of Iit Madras Tutorial 1.1.1 Build Your Basic BotJavier Dorado SánchezNo ratings yet
- Pattesh Technical ReportDocument22 pagesPattesh Technical ReportAakarsh DeepNo ratings yet
- Q: What Will The Future of Roller Coasters Be Like? A:: Innovative ThinkingDocument3 pagesQ: What Will The Future of Roller Coasters Be Like? A:: Innovative Thinkingstar0kissNo ratings yet
- PhET Roller Coaster Physics InvestigationDocument5 pagesPhET Roller Coaster Physics InvestigationAJ RJNo ratings yet
- l3 Applications Final Report Group 10Document4 pagesl3 Applications Final Report Group 10api-281351417No ratings yet
- Fine-Grained Bird Classification & DetectionDocument25 pagesFine-Grained Bird Classification & DetectionRahul Kumar MeenaNo ratings yet
- Revised MTP END Sem Schedule From 11th June To 14th June 2016Document2 pagesRevised MTP END Sem Schedule From 11th June To 14th June 2016Rahul Kumar MeenaNo ratings yet
- Buck Converter B12089Document16 pagesBuck Converter B12089Rahul Kumar MeenaNo ratings yet
- MTP END Sem Schedule From 11th June To 13th June 2016Document2 pagesMTP END Sem Schedule From 11th June To 13th June 2016Rahul Kumar MeenaNo ratings yet
- VtolDocument5 pagesVtolRahul Kumar MeenaNo ratings yet
- Lab Report-06 (Mechkit) : Objective-TheoryDocument6 pagesLab Report-06 (Mechkit) : Objective-TheoryRahul Kumar MeenaNo ratings yet
- By Rahul Kumar: File Time Submitted Submission Id Word Count Character CountDocument42 pagesBy Rahul Kumar: File Time Submitted Submission Id Word Count Character CountRahul Kumar MeenaNo ratings yet
- Fine-Grained Bird Classification: Group Members:-Rahul Kumar (B12089) Ajay Kumar (B12039) Mentor: Arnav BhavsarDocument23 pagesFine-Grained Bird Classification: Group Members:-Rahul Kumar (B12089) Ajay Kumar (B12039) Mentor: Arnav BhavsarRahul Kumar MeenaNo ratings yet
- Electric Drive in Agriculture FieldDocument12 pagesElectric Drive in Agriculture FieldRahul Kumar MeenaNo ratings yet
- Mahidra and Mahindra Ltd.Document17 pagesMahidra and Mahindra Ltd.Rahul Kumar MeenaNo ratings yet
- Canny Edge DetectionDocument3 pagesCanny Edge DetectionRahul Kumar MeenaNo ratings yet
- By Rahul Kumar: File Time Submitted Submission Id Word Count Character CountDocument42 pagesBy Rahul Kumar: File Time Submitted Submission Id Word Count Character CountRahul Kumar MeenaNo ratings yet
- Mahindra & Mahindra Ltd.Document17 pagesMahindra & Mahindra Ltd.Rahul Kumar MeenaNo ratings yet
- De BoundaryDocument2 pagesDe BoundaryRahul Kumar MeenaNo ratings yet
- Boost ConveterDocument6 pagesBoost ConveterRahul Kumar MeenaNo ratings yet
- Laboratory 5: Device Characteristics of nMOSFET: ObjectiveDocument8 pagesLaboratory 5: Device Characteristics of nMOSFET: ObjectiveRahul Kumar Meena0% (1)
- Assn 5Document2 pagesAssn 5Rahul Kumar MeenaNo ratings yet
- 12 Angry MenDocument2 pages12 Angry MenRahul Kumar MeenaNo ratings yet
- Hvact G8Document6 pagesHvact G8Rahul Kumar MeenaNo ratings yet
- iMcAm Capture ShahidDocument3 pagesiMcAm Capture ShahidRahul Kumar MeenaNo ratings yet
- Random DiscDocument1 pageRandom DiscRahul Kumar MeenaNo ratings yet
- Compare ImagesDocument5 pagesCompare ImagesRahul Kumar MeenaNo ratings yet
- Control System Lab Experiment No.-3 VTOL Modelling Name-Rahul Kumar Meena (B12089) Group No.-8 Group Member - Reeta Meena Seela AiswaryaDocument5 pagesControl System Lab Experiment No.-3 VTOL Modelling Name-Rahul Kumar Meena (B12089) Group No.-8 Group Member - Reeta Meena Seela AiswaryaRahul Kumar MeenaNo ratings yet
- Bayes Classifier1Document2 pagesBayes Classifier1Rahul Kumar MeenaNo ratings yet
- Pixel Segmentation ItrDocument1 pagePixel Segmentation ItrRahul Kumar MeenaNo ratings yet
- Course List Feb Jun 2015 - Pre - Regn Nov2014Document4 pagesCourse List Feb Jun 2015 - Pre - Regn Nov2014Rahul Kumar MeenaNo ratings yet
- Fold NDocument2 pagesFold NRahul Kumar MeenaNo ratings yet
- Perceptron ImageDocument2 pagesPerceptron ImageRahul Kumar MeenaNo ratings yet
- DSB - SC& SSC - SCDocument1 pageDSB - SC& SSC - SCRahul Kumar MeenaNo ratings yet
- Sully: The Untold Story Behind the Miracle on the HudsonFrom EverandSully: The Untold Story Behind the Miracle on the HudsonRating: 4 out of 5 stars4/5 (103)
- The Fabric of Civilization: How Textiles Made the WorldFrom EverandThe Fabric of Civilization: How Textiles Made the WorldRating: 4.5 out of 5 stars4.5/5 (58)
- Hero Found: The Greatest POW Escape of the Vietnam WarFrom EverandHero Found: The Greatest POW Escape of the Vietnam WarRating: 4 out of 5 stars4/5 (19)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaFrom EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNo ratings yet
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- A Place of My Own: The Architecture of DaydreamsFrom EverandA Place of My Own: The Architecture of DaydreamsRating: 4 out of 5 stars4/5 (242)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestFrom EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestRating: 4 out of 5 stars4/5 (28)
- Reality+: Virtual Worlds and the Problems of PhilosophyFrom EverandReality+: Virtual Worlds and the Problems of PhilosophyRating: 4 out of 5 stars4/5 (24)
- 35 Miles From Shore: The Ditching and Rescue of ALM Flight 980From Everand35 Miles From Shore: The Ditching and Rescue of ALM Flight 980Rating: 4 out of 5 stars4/5 (21)
- Pale Blue Dot: A Vision of the Human Future in SpaceFrom EverandPale Blue Dot: A Vision of the Human Future in SpaceRating: 4.5 out of 5 stars4.5/5 (588)
- The End of Craving: Recovering the Lost Wisdom of Eating WellFrom EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellRating: 4.5 out of 5 stars4.5/5 (81)
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1395)
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationFrom EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationRating: 4.5 out of 5 stars4.5/5 (46)
- Transformed: Moving to the Product Operating ModelFrom EverandTransformed: Moving to the Product Operating ModelRating: 4 out of 5 stars4/5 (1)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerFrom EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerRating: 4.5 out of 5 stars4.5/5 (122)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureFrom EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureRating: 5 out of 5 stars5/5 (125)
- Mini Farming: Self-Sufficiency on 1/4 AcreFrom EverandMini Farming: Self-Sufficiency on 1/4 AcreRating: 4 out of 5 stars4/5 (76)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyFrom EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNo ratings yet
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansFrom EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansNo ratings yet
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerFrom EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerRating: 4.5 out of 5 stars4.5/5 (54)
- The Weather Machine: A Journey Inside the ForecastFrom EverandThe Weather Machine: A Journey Inside the ForecastRating: 3.5 out of 5 stars3.5/5 (31)