You might also like
- Osciloscopio CompletoDocument115 pagesOsciloscopio CompletodfjarNo ratings yet
- Prueba Tecnico PedagogicaDocument24 pagesPrueba Tecnico PedagogicaAndres Felipe Mendoza ObandoNo ratings yet
- Latinoamericana11 (1) 5Document22 pagesLatinoamericana11 (1) 5Ricardo ParraNo ratings yet
- JAIponencia 2Document43 pagesJAIponencia 2Ricardo ParraNo ratings yet
- Altitud Versus PresionDocument1 pageAltitud Versus PresionRicardo ParraNo ratings yet
- PresentaciónGNCV PpsDocument111 pagesPresentaciónGNCV PpsRicardo Parra100% (1)
- Cajas CVT y ConvertidoresDocument10 pagesCajas CVT y ConvertidoresRicardo ParraNo ratings yet
- Electronica AutomotrizDocument264 pagesElectronica AutomotrizHéctor Fidel Chire Ramírez98% (44)
- PresentaciónGNCV PDFDocument56 pagesPresentaciónGNCV PDFRicardo Parra100% (1)
- Bombas Datos TécnicosDocument8 pagesBombas Datos Técnicosua033678100% (1)
- Mto. Preventivo de Motores DieselDocument5 pagesMto. Preventivo de Motores DieselRicardo ParraNo ratings yet
- Modulo Fisica de Semi Conduct OresDocument138 pagesModulo Fisica de Semi Conduct OresisenambusNo ratings yet
- Manual Sistemas Motor Diesel Combustible PrecalentamientoDocument9 pagesManual Sistemas Motor Diesel Combustible PrecalentamientoJuan Manuel Fernandez MirandaNo ratings yet
- Cajas CVT y ConvertidoresDocument10 pagesCajas CVT y ConvertidoresRicardo ParraNo ratings yet
- ERJ151 (1) Localizacion Componentes PDFDocument24 pagesERJ151 (1) Localizacion Componentes PDFRicardo ParraNo ratings yet
- ERJ012 (1) AlternadorDocument4 pagesERJ012 (1) AlternadorRicardo ParraNo ratings yet
- Manual Mecanica Automotriz Bombas Lineales Simples DoblesDocument22 pagesManual Mecanica Automotriz Bombas Lineales Simples DoblesRicardo ParraNo ratings yet
- Practica de Laboratorio No 1Document3 pagesPractica de Laboratorio No 1Ricardo ParraNo ratings yet
- Conceptosdealineacinybalanceoautomotriz 140625182253 Phpapp01Document14 pagesConceptosdealineacinybalanceoautomotriz 140625182253 Phpapp01Ricardo ParraNo ratings yet
- ERJ151 (1) Localizacion ComponentesDocument24 pagesERJ151 (1) Localizacion ComponentesRicardo ParraNo ratings yet
- Manual Sistemas Motor Diesel Combustible PrecalentamientoDocument9 pagesManual Sistemas Motor Diesel Combustible PrecalentamientoJuan Manuel Fernandez MirandaNo ratings yet
- Tabla de ContenidoDocument4 pagesTabla de ContenidoRicardo ParraNo ratings yet
- Análisis FallasDocument72 pagesAnálisis FallasmanuelmanriqueNo ratings yet
- Manuales de carrozasDocument419 pagesManuales de carrozasRicardo Parra92% (13)
- Composiscion Del AireDocument48 pagesComposiscion Del AireRicardo ParraNo ratings yet
- Manual Mecanica Automotriz Bombas Lineales Simples DoblesDocument22 pagesManual Mecanica Automotriz Bombas Lineales Simples DoblesRicardo ParraNo ratings yet
- Seguridad Taller MecanicoDocument124 pagesSeguridad Taller MecanicoFreddy Males SantosNo ratings yet
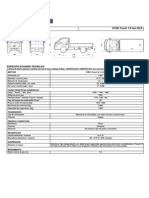
- H100 Truck 1ton PDFDocument1 pageH100 Truck 1ton PDFRicardo ParraNo ratings yet
- Programa de Formación Mecatronica V102 PDFDocument47 pagesPrograma de Formación Mecatronica V102 PDFRicardo Parra100% (1)
- Diagrama y Despiece Aveo Kalos Barina Swift+Document530 pagesDiagrama y Despiece Aveo Kalos Barina Swift+Nilcar Del Valle Montaner83% (6)
- Ingenieria de AeropuertosDocument536 pagesIngenieria de Aeropuertosraul11838028100% (6)
- Descomposición FuncionalDocument20 pagesDescomposición FuncionalJuan Hernandez50% (2)
- Comparacion de La Norma E.030 2009 - 2016Document36 pagesComparacion de La Norma E.030 2009 - 2016Lex Tito Cardenas Saldaña57% (7)
- Cuestionario Giro Linguistico 2016Document9 pagesCuestionario Giro Linguistico 2016Ladys Paola Perilla GonzalezNo ratings yet
- Cadena de Abastecimiento DEPRISADocument8 pagesCadena de Abastecimiento DEPRISAJuan gallego paipillaNo ratings yet
- 805 1202 1 PBDocument6 pages805 1202 1 PBkarlaNo ratings yet
- Cultura, identidad y metropolitanismo globalDocument15 pagesCultura, identidad y metropolitanismo globalJenny MartínezNo ratings yet
- Rutas de Investigación Metalúrgica Jose Manzaneda PDFDocument62 pagesRutas de Investigación Metalúrgica Jose Manzaneda PDFJavier GR100% (1)
- Listado de ItemsDocument7 pagesListado de ItemsBriam RamonNo ratings yet
- Cantidades Ejecutadas y Pendientes Por EjecutarDocument2 pagesCantidades Ejecutadas y Pendientes Por EjecutarMaria Guio AvellaNo ratings yet
- LESIONES MECANICAS RandyyyyDocument19 pagesLESIONES MECANICAS RandyyyyYessa SandritaNo ratings yet
- Descripción: Bomba HidráulicaDocument2 pagesDescripción: Bomba HidráulicaHIDRAULICA MANSE SERVICIO TECNICONo ratings yet
- Riesgos InformaticosDocument6 pagesRiesgos InformaticosJoe Estrella MarceloNo ratings yet
- Ficha Tecnica de Seguimiento de ModelosDocument8 pagesFicha Tecnica de Seguimiento de ModelosDavid DeshabillzNo ratings yet
- La Contaminación Del Rio ChilcaDocument5 pagesLa Contaminación Del Rio ChilcaAndres Ramos MavilaNo ratings yet
- Escenario 2030 PDFDocument13 pagesEscenario 2030 PDFrobertoNo ratings yet
- Revista Somos GmiDocument48 pagesRevista Somos GmiSergio MujicaNo ratings yet
- Coordinacion Alimentos y BebidasDocument10 pagesCoordinacion Alimentos y BebidasLeonardo NaranjoNo ratings yet
- Administración, PrevisiónDocument12 pagesAdministración, PrevisiónRaúlMedinaNo ratings yet
- Propiedades Del BronceDocument4 pagesPropiedades Del BronceArturo Zarazúa50% (2)
- Curriculum VitaeDocument4 pagesCurriculum VitaeNash Paul Polzl100% (1)
- Programa Técnicos Auxiliares de Informática 2017Document3 pagesPrograma Técnicos Auxiliares de Informática 2017ljuamarNo ratings yet
- Cotizacion WillyDocument3 pagesCotizacion WillyDiego Alonso BarrientosNo ratings yet
- Apunte Informe de Experimento CientificoDocument4 pagesApunte Informe de Experimento CientificoElizabeth Jimenez100% (3)
- Curso General Automata Programable OmronDocument96 pagesCurso General Automata Programable OmronJavi Cascant100% (1)
- ATORRESI Proceso de Escritura, InformesDocument9 pagesATORRESI Proceso de Escritura, InformesEdu NúñezNo ratings yet
- Grano Vita AndinaDocument23 pagesGrano Vita AndinaLizeth Balbin AuquiNo ratings yet
- Diagnostico SocioeconomicoDocument219 pagesDiagnostico SocioeconomicoBrenda Maria RuizNo ratings yet
- 12 Paneles Solares - Comunidad Alcapari-Caseta y Cerco - A3Document4 pages12 Paneles Solares - Comunidad Alcapari-Caseta y Cerco - A3Cristian Alcócer ValdezNo ratings yet
- PDC Cámara Digital 201401Document7 pagesPDC Cámara Digital 201401mage560No ratings yet
- Enseñar Matemática hoy: Miradas, sentidos y desafíosFrom EverandEnseñar Matemática hoy: Miradas, sentidos y desafíosRating: 5 out of 5 stars5/5 (1)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraFrom EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraRating: 4.5 out of 5 stars4.5/5 (5)
- La Teoría de Conjuntos y los Fundamentos de las MatemáticasFrom EverandLa Teoría de Conjuntos y los Fundamentos de las MatemáticasRating: 5 out of 5 stars5/5 (1)
- Guía práctica para la refracción ocularFrom EverandGuía práctica para la refracción ocularRating: 5 out of 5 stars5/5 (2)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalFrom EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalRating: 5 out of 5 stars5/5 (3)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasFrom EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasRating: 5 out of 5 stars5/5 (4)
- NIKOLA TESLA: Mis Inventos - AutobiografiaFrom EverandNIKOLA TESLA: Mis Inventos - AutobiografiaRating: 4.5 out of 5 stars4.5/5 (2)
- Didáctica de la matemática en la escuela primariaFrom EverandDidáctica de la matemática en la escuela primariaRating: 2.5 out of 5 stars2.5/5 (3)
- Física paso a paso: Más de 100 problemas resueltosFrom EverandFísica paso a paso: Más de 100 problemas resueltosRating: 4 out of 5 stars4/5 (12)
- Mi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaFrom EverandMi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaRating: 5 out of 5 stars5/5 (5)
- La guía definitiva en Matemáticas para el Ingreso al BachilleratoFrom EverandLa guía definitiva en Matemáticas para el Ingreso al BachilleratoRating: 4.5 out of 5 stars4.5/5 (9)
- Problemas de física general en un año olímpicoFrom EverandProblemas de física general en un año olímpicoRating: 5 out of 5 stars5/5 (1)
- Proyectos de instalaciones eléctrica de baja tensiónFrom EverandProyectos de instalaciones eléctrica de baja tensiónRating: 5 out of 5 stars5/5 (1)
- Chernóbil: La catástrofe nuclear que impactó al mundo enteroFrom EverandChernóbil: La catástrofe nuclear que impactó al mundo enteroRating: 3.5 out of 5 stars3.5/5 (3)
- La noción de medio en la teoría de las situaciones didácticas: Una herramienta para analizar decisiones en las clases de matemáticaFrom EverandLa noción de medio en la teoría de las situaciones didácticas: Una herramienta para analizar decisiones en las clases de matemáticaRating: 5 out of 5 stars5/5 (1)
- Modelización matemática en el aula: Posibilidades y necesidadesFrom EverandModelización matemática en el aula: Posibilidades y necesidadesRating: 5 out of 5 stars5/5 (1)
- Convertidores conmutados de potencia: Test de autoevaluaciónFrom EverandConvertidores conmutados de potencia: Test de autoevaluaciónRating: 5 out of 5 stars5/5 (1)
- Introducción a las ecuaciones de la física matemáticaFrom EverandIntroducción a las ecuaciones de la física matemáticaRating: 5 out of 5 stars5/5 (4)