You might also like
- Matriz de Responsabilidades ISO 9001 2015Document1 pageMatriz de Responsabilidades ISO 9001 2015Angel Hernandez100% (6)
- Dieta Del Merecimiento. Louise L HayDocument65 pagesDieta Del Merecimiento. Louise L HayI379100% (5)
- 921800280301171CC73119968C PDFDocument1 page921800280301171CC73119968C PDFRafael Eduardo Malambo ZuñigaNo ratings yet
- Concepto 105641 de 2015 Departamento Administrativo de La Función Pública PDFDocument5 pagesConcepto 105641 de 2015 Departamento Administrativo de La Función Pública PDFRafael Eduardo Malambo ZuñigaNo ratings yet
- Matriz de Roles y Responsabilidades Del SG SST 0 PDFDocument8 pagesMatriz de Roles y Responsabilidades Del SG SST 0 PDFgara1245No ratings yet
- 27905Document4 pages27905Rafael Eduardo Malambo ZuñigaNo ratings yet
- Decreto 181 Del 08 de Febrero de 2019 PDFDocument12 pagesDecreto 181 Del 08 de Febrero de 2019 PDFAndres Manuel ArrietaNo ratings yet
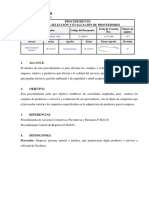
- Procedimiento de ComprasDocument7 pagesProcedimiento de Comprasedguillar100% (1)
- Análisis de Roles de Trabajo en EquipoDocument519 pagesAnálisis de Roles de Trabajo en EquipoLeonardo Ramirez86% (7)
- Metodología de La Investigación - Sampieri - 6ta EDICIONDocument96 pagesMetodología de La Investigación - Sampieri - 6ta EDICIONLeonardo NeusaNo ratings yet
- Procedimiento de ComprasDocument7 pagesProcedimiento de Comprasedguillar100% (1)
- Procedimiento de ComprasDocument7 pagesProcedimiento de Comprasedguillar100% (1)
- PMOInformatica Plantilla de Solicitud de CambiosDocument4 pagesPMOInformatica Plantilla de Solicitud de CambiosRafael Eduardo Malambo ZuñigaNo ratings yet
- Decreto 181 Del 08 de Febrero de 2019 PDFDocument12 pagesDecreto 181 Del 08 de Febrero de 2019 PDFAndres Manuel ArrietaNo ratings yet
- Report2019 12 02 19 13 22 PDFDocument1 pageReport2019 12 02 19 13 22 PDFRafael Eduardo Malambo ZuñigaNo ratings yet
- Matriz de Riesgos Conserva de PescadoDocument11 pagesMatriz de Riesgos Conserva de Pescadosupermariobros01No ratings yet
- PMOInformatica Plantilla de Solicitud de CambiosDocument4 pagesPMOInformatica Plantilla de Solicitud de CambiosRafael Eduardo Malambo ZuñigaNo ratings yet
- PMOinformatica Plantilla Matriz RACIDocument3 pagesPMOinformatica Plantilla Matriz RACIGustavo Andres Camargo DuqueNo ratings yet
- PMOInformatica Plantilla de Solicitud de CambiosDocument4 pagesPMOInformatica Plantilla de Solicitud de CambiosRafael Eduardo Malambo ZuñigaNo ratings yet
- Matriz RACI Simplificado - Cómo Crear Una Matriz de Responsabilidades Que Realmente Funcione - The Digital Project ManagerDocument22 pagesMatriz RACI Simplificado - Cómo Crear Una Matriz de Responsabilidades Que Realmente Funcione - The Digital Project ManagerRafael Eduardo Malambo ZuñigaNo ratings yet
- Matriz RACI Simplificado - Cómo Crear Una Matriz de Responsabilidades Que Realmente Funcione - The Digital Project ManagerDocument22 pagesMatriz RACI Simplificado - Cómo Crear Una Matriz de Responsabilidades Que Realmente Funcione - The Digital Project ManagerRafael Eduardo Malambo ZuñigaNo ratings yet
- Izaje de Cargas PDFDocument26 pagesIzaje de Cargas PDFpipeo25No ratings yet
- Des CapoteDocument1 pageDes CapoteJorge Mauricio Zutta ObandoNo ratings yet
- Actividad 2 Costos en La Concepcion Del ProyectoDocument6 pagesActividad 2 Costos en La Concepcion Del ProyectoRafael Eduardo Malambo ZuñigaNo ratings yet
- Actividad 1. Inventario de Planos Curso de Costos y Presupuestos SENADocument8 pagesActividad 1. Inventario de Planos Curso de Costos y Presupuestos SENAdiegoboca921108No ratings yet
- PMOinformatica Plantilla Matriz RACIDocument3 pagesPMOinformatica Plantilla Matriz RACIGustavo Andres Camargo DuqueNo ratings yet
- Evolución Del Proceso de Diseño OkDocument15 pagesEvolución Del Proceso de Diseño OkFrancisco Espinosa LamasNo ratings yet
- PMOinformatica Plantilla Matriz RACIDocument3 pagesPMOinformatica Plantilla Matriz RACIGustavo Andres Camargo DuqueNo ratings yet
- Redondeos para El IBC - MinProtecciónSocialDocument1 pageRedondeos para El IBC - MinProtecciónSocialJuan David Muñoz Lopez de SaadNo ratings yet
- 23 Manual Contratistas1Document12 pages23 Manual Contratistas1pareskifNo ratings yet
- Tabla SMMLV y Redondeos IBC 2019Document14 pagesTabla SMMLV y Redondeos IBC 2019Rafael Eduardo Malambo ZuñigaNo ratings yet
- Ensayo de Educación PreescolarDocument1 pageEnsayo de Educación PreescolarDayana Torrealba100% (1)
- Industria Del PerfumeDocument25 pagesIndustria Del PerfumetrigresvlaqsNo ratings yet
- Programa Barista Nivel 1Document5 pagesPrograma Barista Nivel 1javiermcastrosNo ratings yet
- Yamaha PSR-600 ManualDocument27 pagesYamaha PSR-600 Manualscreesh100% (1)
- Estructura Textual y Tipos de TextosDocument52 pagesEstructura Textual y Tipos de Textosmarbella valdivia83% (6)
- Estudio de Los Gases Ideales y Reales - Lab 1Document27 pagesEstudio de Los Gases Ideales y Reales - Lab 1Rosario CcahuanticoNo ratings yet
- Tarea #4 Psicologia Del Desarrollo 2Document5 pagesTarea #4 Psicologia Del Desarrollo 2jaelNo ratings yet
- Productos NotablesDocument22 pagesProductos NotablesUlises Gonzalez MoralesNo ratings yet
- Caso WFMDocument8 pagesCaso WFMMilton Raul Rivas saballosNo ratings yet
- Cuestionario de Modos de Afrontamiento Del EstrésDocument4 pagesCuestionario de Modos de Afrontamiento Del EstrésGeorgina ChavezNo ratings yet
- Autores InteligenciaDocument5 pagesAutores InteligenciaCecilia MoralesNo ratings yet
- Quien Dicen Los Hombres Que Soy YoDocument7 pagesQuien Dicen Los Hombres Que Soy YoBrian Maxwell Burga Saba100% (2)
- Modelo Informe SemestralDocument4 pagesModelo Informe SemestralYanina Barriola Abad0% (1)
- El Cuento de La AbuelaDocument3 pagesEl Cuento de La AbuelaMariana SilvaNo ratings yet
- Calse 1 Valor NuméricoDocument7 pagesCalse 1 Valor NuméricoGiovana Sulca QuispeNo ratings yet
- Clase de LiteraturaDocument1 pageClase de LiteraturaJuan RojasNo ratings yet
- Padlet Lzar726ppei5sskwDocument5 pagesPadlet Lzar726ppei5sskwEdgar SantanaNo ratings yet
- Grupo 1 - Anorexia Nerviosa - Enfermedades de La Conducta AlimenticiaDocument5 pagesGrupo 1 - Anorexia Nerviosa - Enfermedades de La Conducta AlimenticiaAlisson SilvaNo ratings yet
- El Desarrollo de Actividades de Interaprendizaje y ConvivenciaDocument3 pagesEl Desarrollo de Actividades de Interaprendizaje y ConvivenciaDavidCcasoNo ratings yet
- Colestasia FINALDocument47 pagesColestasia FINALFernando González PeruggiNo ratings yet
- Ensayo Psicologia SocialDocument3 pagesEnsayo Psicologia SocialAdrian Silvera100% (2)
- Tesis Doctoral - Claudia MolinaDocument343 pagesTesis Doctoral - Claudia MolinaLuis Gerardo Ponciano EstradaNo ratings yet
- Olive Leon Que Es La Ciencia 987Document16 pagesOlive Leon Que Es La Ciencia 987Erick Foss Ü100% (1)
- Estudio de Asimetria LeringeaDocument7 pagesEstudio de Asimetria LeringeaClaudia TorresNo ratings yet
- García GarduñoDocument26 pagesGarcía GarduñoAmi BelleroseNo ratings yet
- Guía # 1 - 10° - 3er. PeríodoDocument30 pagesGuía # 1 - 10° - 3er. PeríodoMelissa Vanegas MartínezNo ratings yet
- Inteligencia y AfectividadDocument23 pagesInteligencia y AfectividadLuis Gustavo Jimenez SiancasNo ratings yet
- Matriz de Calificacion e InterpretacionDocument3 pagesMatriz de Calificacion e InterpretacionLuna CristinaNo ratings yet
- 03 Resistencia Del Concreto PDFDocument7 pages03 Resistencia Del Concreto PDFchristianNo ratings yet