You might also like
- M Tech SP Syllabus PDFDocument20 pagesM Tech SP Syllabus PDFVigneshwaran SrinivasanNo ratings yet
- M Tech SP Syllabus PDFDocument20 pagesM Tech SP Syllabus PDFVigneshwaran SrinivasanNo ratings yet
- Oxford Handbook of Rehabilitation MedicineDocument1 pageOxford Handbook of Rehabilitation MedicineVigneshwaran SrinivasanNo ratings yet
- Biomedical Engineering PDFDocument104 pagesBiomedical Engineering PDFgsv988No ratings yet
- Biomedical Instrumentation EC704C Contacts: 3L Credits: 3 Module - 1 (Fundamentals)Document2 pagesBiomedical Instrumentation EC704C Contacts: 3L Credits: 3 Module - 1 (Fundamentals)Vigneshwaran SrinivasanNo ratings yet
- Galaxy A70 Yesbank CB TNCDocument1 pageGalaxy A70 Yesbank CB TNCNitin GuptaNo ratings yet
- Bookreview Nanosensors VinodKumarKhanna 2 PDFDocument4 pagesBookreview Nanosensors VinodKumarKhanna 2 PDFVigneshwaran SrinivasanNo ratings yet
- Latin Square MethodDocument19 pagesLatin Square MethodAbro FatimaNo ratings yet
- SQL 1Document43 pagesSQL 1Vigneshwaran SrinivasanNo ratings yet
- Project Proposal FormDocument3 pagesProject Proposal FormVigneshwaran SrinivasanNo ratings yet
- Elements of Writing StyleDocument12 pagesElements of Writing StyleMuhammad SaadNo ratings yet
- Genetic Algorithms: Muhannad HarrimDocument44 pagesGenetic Algorithms: Muhannad HarrimDebabrata PalNo ratings yet
- Barcodereader 150212072129 Conversion Gate02 PDFDocument26 pagesBarcodereader 150212072129 Conversion Gate02 PDFVigneshwaran SrinivasanNo ratings yet
- Papercuttingrewindingmachine Projectreportsreesanghpghosh 130319004110 Phpapp01Document56 pagesPapercuttingrewindingmachine Projectreportsreesanghpghosh 130319004110 Phpapp01Vigneshwaran SrinivasanNo ratings yet
- Arduino Uno SchematicDocument1 pageArduino Uno Schematiczippys123100% (4)
- Prepared By: Rania Hasan Enas HamadnehDocument20 pagesPrepared By: Rania Hasan Enas HamadnehVigneshwaran SrinivasanNo ratings yet
- Multi-Function Operating Machine: A Conceptual ModelDocument7 pagesMulti-Function Operating Machine: A Conceptual ModelInternational Organization of Scientific Research (IOSR)No ratings yet
- Specification, Design and Kinematic Analysis of An Electric Toothbrush Using CATIAV5R19Document109 pagesSpecification, Design and Kinematic Analysis of An Electric Toothbrush Using CATIAV5R19Ahmed BdairNo ratings yet
- Belt DriveDocument14 pagesBelt DriveSumit VakhariaNo ratings yet
- Specification, Design and Kinematic Analysis of An Electric Toothbrush Using CATIAV5R19Document109 pagesSpecification, Design and Kinematic Analysis of An Electric Toothbrush Using CATIAV5R19Ahmed BdairNo ratings yet
- Pipeline Inspection and Borewell Rescue RobotDocument4 pagesPipeline Inspection and Borewell Rescue RobotInternational Journal of Research in Engineering and Technology100% (1)
- Development of Four Wheel Steering System For A Car: K. Lohith, Dr. S. R. Shankapal, M. H. Monish GowdaDocument8 pagesDevelopment of Four Wheel Steering System For A Car: K. Lohith, Dr. S. R. Shankapal, M. H. Monish GowdaGaurav PandeyNo ratings yet
- Building Drawing - 1Document6 pagesBuilding Drawing - 1Vigneshwaran SrinivasanNo ratings yet
- Automatic IR Tap ControllerDocument67 pagesAutomatic IR Tap ControllerAnkit88% (16)
- Welding Tips and TricksDocument24 pagesWelding Tips and TricksgullipalliNo ratings yet
- ME401 - Economics and Principles of Management Question Bank Unit - III 2 Marks Questions: Unit - IV (Up To Cycle Test - II)Document1 pageME401 - Economics and Principles of Management Question Bank Unit - III 2 Marks Questions: Unit - IV (Up To Cycle Test - II)Vigneshwaran SrinivasanNo ratings yet
- EnergyDocument25 pagesEnergyShubham MittalNo ratings yet
- NuclearDocument18 pagesNuclearMrigank prasadNo ratings yet
- Module 1: Data Organization: Learning GoalsDocument15 pagesModule 1: Data Organization: Learning GoalsVigneshwaran SrinivasanNo ratings yet
- ReferencesDocument5 pagesReferencesVigneshwaran SrinivasanNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- List 2017Document227 pagesList 2017ultaphuultaNo ratings yet
- PCS250/250G/260/265: 4G/3G/2G/GSM Communicator ModulesDocument2 pagesPCS250/250G/260/265: 4G/3G/2G/GSM Communicator ModulesAndresito LobosNo ratings yet
- CPV 363 MFDocument9 pagesCPV 363 MFSergio MuriloNo ratings yet
- KINGTYPE GT8×××External Modulation Optical Transmitter - User ManualDocument14 pagesKINGTYPE GT8×××External Modulation Optical Transmitter - User ManualBayu BentarNo ratings yet
- Bandpass Filter TutorialDocument7 pagesBandpass Filter TutorialJaideep BoseNo ratings yet
- 9-AM 683-A - Jupiter 900 Panel MountDocument24 pages9-AM 683-A - Jupiter 900 Panel MountLabtecNo ratings yet
- Double Side Band - Suppressed Carrier (DSB-SC) AND Single Side BandDocument55 pagesDouble Side Band - Suppressed Carrier (DSB-SC) AND Single Side BanddhanalakshmiNo ratings yet
- Lecture On Fundamentals of Signal and Power IntegrityDocument40 pagesLecture On Fundamentals of Signal and Power IntegrityjaltitiNo ratings yet
- Backhaul Movil - Modulo 2Document218 pagesBackhaul Movil - Modulo 2MIGUEL CASTRO100% (1)
- Numerical Study On The Effects of Total Solid Concentration On Mixing Quality of Non-Newtonian Fluid in Cylindrical Anaerobic DigestersDocument5 pagesNumerical Study On The Effects of Total Solid Concentration On Mixing Quality of Non-Newtonian Fluid in Cylindrical Anaerobic DigestersBruce LennyNo ratings yet
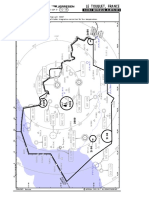
- Lfat/Ltq Le Touquet, France: .Radar - Minimum.AltitudesDocument10 pagesLfat/Ltq Le Touquet, France: .Radar - Minimum.AltitudesAurelien FLUTEAUXNo ratings yet
- Power Factor CalculationDocument2 pagesPower Factor CalculationSandeep DeodharNo ratings yet
- Proportional Amplifier Type EV2S: Product DocumentationDocument29 pagesProportional Amplifier Type EV2S: Product DocumentationAsa ReidNo ratings yet
- Manual LG An110w PDFDocument48 pagesManual LG An110w PDFWayne WondNo ratings yet
- Dragonwave Product GuideDocument8 pagesDragonwave Product GuidejlmompriveNo ratings yet
- Yaesu Ftdx3000 Transceiver SupplementDocument151 pagesYaesu Ftdx3000 Transceiver Supplementpp1jlbrNo ratings yet
- Isolation Transformer PDFDocument3 pagesIsolation Transformer PDFdeepakNo ratings yet
- PN Junction Diode - MergedDocument55 pagesPN Junction Diode - MergedPrasanth. SNo ratings yet
- Advanced ElectronicsDocument19 pagesAdvanced ElectronicsKevin G. TolentinoNo ratings yet
- Computer Organization & Architecture: Exercises 1Document13 pagesComputer Organization & Architecture: Exercises 1Haseeb Javed100% (1)
- BoostYourChess2 ExcerptDocument16 pagesBoostYourChess2 ExcerptThe Smart Boy KungFuPawnNo ratings yet
- Unit 1 - ARM7Document67 pagesUnit 1 - ARM7Makrand KakatkarNo ratings yet
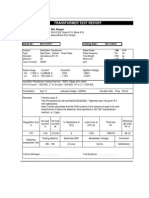
- X-Former Test Report For 100kVADocument3 pagesX-Former Test Report For 100kVAnisargo0% (1)
- Lecture 1 (INTRO)Document27 pagesLecture 1 (INTRO)nehar shubheschaNo ratings yet
- FT232 FT245 APIv131Document13 pagesFT232 FT245 APIv131KortnerNo ratings yet
- TV LED Rolsen RL-19E1303 Con PSU-ER935Document28 pagesTV LED Rolsen RL-19E1303 Con PSU-ER935Juan CarlosNo ratings yet
- Solar Panel 480 Watt Dimensions - Buscar Con GoogDocument1 pageSolar Panel 480 Watt Dimensions - Buscar Con GoogRudy PintoNo ratings yet
- Flexihopper (Plus) Rel. 2.7 Change Delivery 1 & Fiu 19E 3.2, V.3Document32 pagesFlexihopper (Plus) Rel. 2.7 Change Delivery 1 & Fiu 19E 3.2, V.3Wahyu GutomoNo ratings yet
- Final - Sum SmallDocument72 pagesFinal - Sum Smalledna sisayNo ratings yet