You might also like
- Méthode de MohrDocument17 pagesMéthode de MohrDragana Jevremovic50% (2)
- Déplacements Des Poutres FléchiesDocument9 pagesDéplacements Des Poutres FléchiesSimou El Mahmodi100% (2)
- Deplacement Des Poutres FléchiesDocument10 pagesDeplacement Des Poutres FléchiesMalek Ikram CHERAITNo ratings yet
- Chapitre 3 - Élastoplasticité Des Poutres en FlexionDocument24 pagesChapitre 3 - Élastoplasticité Des Poutres en Flexionrached.elfatmiNo ratings yet
- Chapitre6 La Flexion SimpleDocument15 pagesChapitre6 La Flexion SimpleAyou HamNo ratings yet
- MEF PoutreDocument9 pagesMEF PoutreAbdelmajid HmNo ratings yet
- TD2-tenseur DeformationDocument3 pagesTD2-tenseur Deformationalaa khabthaniNo ratings yet
- Plan Détaillé TDDocument6 pagesPlan Détaillé TDLime DorNo ratings yet
- 0B W Sprn2GfpY2M2OTgwZWQtNTQ3OS00NzZhLWFlNjktZjdjNWRhMDEwNzY5Document2 pages0B W Sprn2GfpY2M2OTgwZWQtNTQ3OS00NzZhLWFlNjktZjdjNWRhMDEwNzY5Asma BousameNo ratings yet
- Elasticite PolyDocument14 pagesElasticite PolyYoucef KherroubiNo ratings yet
- Devoir N°3Document3 pagesDevoir N°3Amir MohamedNo ratings yet
- Déformation Et Potentiel InterneDocument21 pagesDéformation Et Potentiel InterneS.DerNo ratings yet
- Theorie Des PoutresDocument13 pagesTheorie Des PoutresorbatNo ratings yet
- Chapitre 7 MMCDocument8 pagesChapitre 7 MMCSarah Med100% (1)
- ElasticitéDocument11 pagesElasticitéWissem AmariNo ratings yet
- Bael CoursDocument172 pagesBael CoursMohamed Mabrouk100% (1)
- Chapitre 2 Théorie Des DéformationsDocument13 pagesChapitre 2 Théorie Des DéformationsERIOLA mendelNo ratings yet
- Exposé de RDM (Voilement Des Plaques Minces &)Document67 pagesExposé de RDM (Voilement Des Plaques Minces &)Gael Bayala100% (1)
- Cours AnalysevectorielleDocument14 pagesCours AnalysevectorielleAnonymous TlGnQZv5d7No ratings yet
- Methode Des ForcesDocument24 pagesMethode Des ForcesPaul Aristide Mbog100% (1)
- P243 Bton Arm BAEL AbdellatiDocument156 pagesP243 Bton Arm BAEL AbdellatiAbdelaliElFaiz100% (1)
- MMC 21 05 22 FDocument28 pagesMMC 21 05 22 FGilchrist LEGBANo ratings yet
- Corrige 2017Document15 pagesCorrige 2017Hammam ElfilaliNo ratings yet
- AnisotropieDocument12 pagesAnisotropieAlbert Braulio ViteNo ratings yet
- Flexion PlaquesDocument13 pagesFlexion PlaquesSourou HoundayiNo ratings yet
- Chap 02 Déplacements Des Poutres en Flexion PlaneDocument15 pagesChap 02 Déplacements Des Poutres en Flexion Planeyoussouf ahmedbabaNo ratings yet
- CHa P2Document12 pagesCHa P2mohNo ratings yet
- Ex Ef Matrice Raideur PoutreDocument3 pagesEx Ef Matrice Raideur Poutreipman99No ratings yet
- Exercice DeformationDocument1 pageExercice DeformationSaiid RiadhNo ratings yet
- MMC 2021 QCM Session CovidDocument6 pagesMMC 2021 QCM Session CovidbejaouiNo ratings yet
- Cours ItoDocument30 pagesCours ItoleticiambadiNo ratings yet
- 6 2flexion PlaneDocument9 pages6 2flexion PlaneyasminaNo ratings yet
- Cour BAELDocument156 pagesCour BAELtrung100% (1)
- Ef4 - ch5 - Copie PDFDocument10 pagesEf4 - ch5 - Copie PDFSid'ahmd Sbai0% (1)
- IA de Diourbel - Cellule Mixte Des Sciences Physiques-Terminale S Année Scolaire 2023/2024 TD: Oscillations Mecaniques LibresDocument4 pagesIA de Diourbel - Cellule Mixte Des Sciences Physiques-Terminale S Année Scolaire 2023/2024 TD: Oscillations Mecaniques Libressng8j9md6kNo ratings yet
- SISMIQUE REFRACTION Chapitre IIDocument35 pagesSISMIQUE REFRACTION Chapitre IIPerso MouassaNo ratings yet
- Elasticité Linéaire Partie 1 & 2 - CopieDocument41 pagesElasticité Linéaire Partie 1 & 2 - CopieAbdelilah Ait IchouNo ratings yet
- RDM TP 4Document16 pagesRDM TP 4Soheib RAFANo ratings yet
- Chapitre2 Contrainte Dans Le SolDocument13 pagesChapitre2 Contrainte Dans Le SolHanna btNo ratings yet
- Déformation Des Poutres Fléchies - Méthode de La Double IntégraleDocument8 pagesDéformation Des Poutres Fléchies - Méthode de La Double IntégraleTarekNo ratings yet
- Cours-Mds 2-Partie-1Document4 pagesCours-Mds 2-Partie-1abd erahimNo ratings yet
- Systemes 1ddlDocument21 pagesSystemes 1ddlYoucef BenhalilemNo ratings yet
- Serie 3Document2 pagesSerie 3afir1993No ratings yet
- Initiation Aux Calculs de Structures Poutre Par Éléments FinisDocument6 pagesInitiation Aux Calculs de Structures Poutre Par Éléments FinisMtthÿ LbrNo ratings yet
- MecaNonLineaire TD2 Cor BisDocument11 pagesMecaNonLineaire TD2 Cor BisjeromedeservignyNo ratings yet
- Chapitre - 2element FiniDocument22 pagesChapitre - 2element Finiismail2001.adyadouNo ratings yet
- Calcul de Structure 1Document23 pagesCalcul de Structure 1joseph leringNo ratings yet
- 0 Calcul2021-20Document9 pages0 Calcul2021-20Roza RoseNo ratings yet
- TP Mds Ensa TetouanDocument8 pagesTP Mds Ensa TetouanAyoub YamaniNo ratings yet
- GM DS9-2013 CorrigéDocument4 pagesGM DS9-2013 CorrigéGray AbNo ratings yet
- TD - Chapitre 3-2022Document3 pagesTD - Chapitre 3-2022R1V3NNo ratings yet
- Examen 117 2000Document8 pagesExamen 117 2000Wang MaxNo ratings yet
- 1 ErepageDocument3 pages1 ErepageBelheziel AekNo ratings yet
- Ue CCV119Document1 pageUe CCV119Belheziel AekNo ratings yet
- ueCCV117 PDFDocument1 pageueCCV117 PDFBelheziel AekNo ratings yet
- ueCCV117 PDFDocument1 pageueCCV117 PDFBelheziel AekNo ratings yet
- N6V1 Fiche Allplan PhotoDocument2 pagesN6V1 Fiche Allplan PhotoBelheziel AekNo ratings yet
- ueCCV118 PDFDocument1 pageueCCV118 PDFBelheziel AekNo ratings yet
- ueCCV109 PDFDocument2 pagesueCCV109 PDFBelheziel AekNo ratings yet
- Ue CCV113Document2 pagesUe CCV113Belheziel AekNo ratings yet
- Bat r+3Document2 pagesBat r+3Belheziel AekNo ratings yet
- Ue CCV111Document1 pageUe CCV111Belheziel AekNo ratings yet
- Ue CCV027Document1 pageUe CCV027Belheziel AekNo ratings yet
- Ue CCV122Document1 pageUe CCV122Belheziel AekNo ratings yet
- ueCCV110 PDFDocument1 pageueCCV110 PDFBelheziel AekNo ratings yet
- Ue CCV020Document1 pageUe CCV020Belheziel AekNo ratings yet
- ueCCV107 PDFDocument1 pageueCCV107 PDFBelheziel AekNo ratings yet
- ueCCV108 PDFDocument1 pageueCCV108 PDFBelheziel AekNo ratings yet
- Ue CCV227Document1 pageUe CCV227Belheziel AekNo ratings yet
- Ue CCV226Document1 pageUe CCV226Belheziel AekNo ratings yet
- ueCCV225 PDFDocument1 pageueCCV225 PDFBelheziel AekNo ratings yet
- Ue CCV008Document1 pageUe CCV008Belheziel AekNo ratings yet
- Ue CCV015Document1 pageUe CCV015Belheziel AekNo ratings yet
- Ue CCV020Document1 pageUe CCV020Belheziel AekNo ratings yet
- ueCCV101 PDFDocument1 pageueCCV101 PDFBelheziel AekNo ratings yet
- Ue CCV015Document1 pageUe CCV015Belheziel AekNo ratings yet
- Ue CCV030Document1 pageUe CCV030Belheziel AekNo ratings yet
- Ue CCV029Document1 pageUe CCV029Belheziel AekNo ratings yet
- Ue CCV001Document1 pageUe CCV001Belheziel AekNo ratings yet
- Ue CCV227Document1 pageUe CCV227Belheziel AekNo ratings yet
- Ue CCV002Document1 pageUe CCV002Belheziel AekNo ratings yet
- AUCE 2032 SeanceallDocument412 pagesAUCE 2032 Seancealljinane caqdidNo ratings yet
- Déformations Élastique Et PlastiqueDocument19 pagesDéformations Élastique Et PlastiqueEl Mahdi El HaouariNo ratings yet
- 4 Prédimensionnement (Les Poutres Plancher Traditionnel)Document10 pages4 Prédimensionnement (Les Poutres Plancher Traditionnel)Yara Loveuse ChicNo ratings yet
- Exemple de Calcul Des Pannes Et Lisses de BardagesDocument19 pagesExemple de Calcul Des Pannes Et Lisses de BardagesSarre100% (1)
- Association Pour La Certification Des Materiaux Isolants: Certificat Acermi #20/018/1469Document2 pagesAssociation Pour La Certification Des Materiaux Isolants: Certificat Acermi #20/018/1469Deeneesh moturNo ratings yet
- RDM CC2 CTDocument2 pagesRDM CC2 CTAfrae SadekNo ratings yet
- B2 MatriauxDocument12 pagesB2 MatriauxMouhaNo ratings yet
- (RDM) (FO) Formulaire RDMDocument2 pages(RDM) (FO) Formulaire RDMKamal ChaibNo ratings yet
- Corrige Serie4 CM 2020 2021Document9 pagesCorrige Serie4 CM 2020 2021somaya ehNo ratings yet
- Etude D'Un Bâtiment R +10+Sous-Sol+Entre Sol A Usage D'Habitation, Commercial Et ServiceDocument201 pagesEtude D'Un Bâtiment R +10+Sous-Sol+Entre Sol A Usage D'Habitation, Commercial Et ServiceDylanNo ratings yet
- Vérification Variante D'escalier en Béton Armé Villa 3Document17 pagesVérification Variante D'escalier en Béton Armé Villa 3Zebiri FouadNo ratings yet
- SKILLS M09F Treillis - Partie 1 v2Document83 pagesSKILLS M09F Treillis - Partie 1 v2Dolly Jese Rabemanantsoa0% (1)
- PFA2 Yasmine Jamil PDFDocument43 pagesPFA2 Yasmine Jamil PDFJamil ZaghouaniNo ratings yet
- Exercices Cours 05 - ÉnoncéDocument4 pagesExercices Cours 05 - ÉnoncéLE goulag Le goulagNo ratings yet
- RMChap3 (Traction) ExSup PDFDocument5 pagesRMChap3 (Traction) ExSup PDFToufikJalalEddine100% (1)
- 5 CisaillementDocument4 pages5 CisaillementAbderrazak Nassiri0% (1)
- Cours CM 1 Chapitre 2 Eléments Fléchis en Construction Métallique 08 09Document61 pagesCours CM 1 Chapitre 2 Eléments Fléchis en Construction Métallique 08 09Issam BrahimNo ratings yet
- 7 Ex Flexion PDFDocument4 pages7 Ex Flexion PDFpascalNo ratings yet
- TP IPE240 MS1 2 Laboratoire Materiaux PDFDocument4 pagesTP IPE240 MS1 2 Laboratoire Materiaux PDFAdam El'merzoukiNo ratings yet
- AcrotèreDocument6 pagesAcrotèreDadiBuenaLaVidaNo ratings yet
- Résolution Système Hyperstatique BDF 30 Aout 2013Document10 pagesRésolution Système Hyperstatique BDF 30 Aout 2013amal100% (1)
- Etude Comparative BAEL91-EC2Document100 pagesEtude Comparative BAEL91-EC2DylanNo ratings yet
- Cours #2 MRFMDocument10 pagesCours #2 MRFMbakkali ikramNo ratings yet
- Chapitre 2 Prescriptions RéglementairesDocument23 pagesChapitre 2 Prescriptions RéglementairesSabriRemremNo ratings yet
- RDM3Document35 pagesRDM3TOURENo ratings yet
- 8 Calcul Des PannesDocument23 pages8 Calcul Des PannesHoussame NaimNo ratings yet
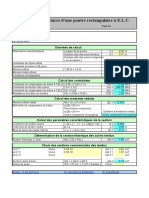
- Poutre Rectangulaire en ELUDocument2 pagesPoutre Rectangulaire en ELUAymen FrikhiNo ratings yet
- TD3 P&CDocument5 pagesTD3 P&Calmer100% (1)
- RESISTANCE DES MATERIAUX N1 ExeDocument3 pagesRESISTANCE DES MATERIAUX N1 ExeghfgdhhngfjfghfnggNo ratings yet
- Chapitre Mécanique Des StructuresDocument54 pagesChapitre Mécanique Des Structuresfatima zahra zaharNo ratings yet