You might also like
- Performance of Turbo Encoder and Turbo Decoder For LTE: ISSN: 2277-3754Document4 pagesPerformance of Turbo Encoder and Turbo Decoder For LTE: ISSN: 2277-3754ghionoiucNo ratings yet
- Design and Implementation of Turbo Decoder For IEEE-802.16e and LTE StandardsDocument6 pagesDesign and Implementation of Turbo Decoder For IEEE-802.16e and LTE StandardsghionoiucNo ratings yet
- Data Center Solutions Guide WP Extreme NetworksDocument53 pagesData Center Solutions Guide WP Extreme NetworksghionoiucNo ratings yet
- Design and ASIC Implementation of A 3GPP LTE-Advance Turbo Encoder and Turbo DecoderDocument5 pagesDesign and ASIC Implementation of A 3GPP LTE-Advance Turbo Encoder and Turbo DecoderghionoiucNo ratings yet
- Standards Path To LTE: Dr. Kenneth (Ken) StewartDocument11 pagesStandards Path To LTE: Dr. Kenneth (Ken) StewartghionoiucNo ratings yet
- Freescale SlideshareDocument25 pagesFreescale SlideshareghionoiucNo ratings yet
- Awc Src3 Manual. 1Document5 pagesAwc Src3 Manual. 1ghionoiucNo ratings yet
- Error Correction and LDPC DecodingDocument44 pagesError Correction and LDPC DecodingghionoiucNo ratings yet
- Scalable Key CryptographyDocument19 pagesScalable Key CryptographyghionoiucNo ratings yet
- Serpent Pe Smartcard FinalDocument8 pagesSerpent Pe Smartcard FinalghionoiucNo ratings yet
- Implement Are SErpent PR FPGAJaroslawDocument6 pagesImplement Are SErpent PR FPGAJaroslawghionoiucNo ratings yet
- Algebra S-BOX SerpentDocument4 pagesAlgebra S-BOX SerpentghionoiucNo ratings yet
- Presentation AES Vs SerpentDocument23 pagesPresentation AES Vs SerpentghionoiucNo ratings yet
- Detectia Erorilor Prin Schimbarea B Paritate SErpentDocument24 pagesDetectia Erorilor Prin Schimbarea B Paritate SErpentghionoiucNo ratings yet
- Generarea S-Box SerpentDocument9 pagesGenerarea S-Box SerpentghionoiucNo ratings yet
- Worked Example - Scalable Key Cryptography:: The Set of N's As ModuliDocument10 pagesWorked Example - Scalable Key Cryptography:: The Set of N's As ModulighionoiucNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Micronta 12VDC Power Adapter 273-1653A InstructionsDocument2 pagesMicronta 12VDC Power Adapter 273-1653A Instructions240GL guyNo ratings yet
- Intel Artificial Intelligence EguideDocument15 pagesIntel Artificial Intelligence Eguidenikhil_805No ratings yet
- HMA Road Design NotesDocument86 pagesHMA Road Design NotesFarooq AhmadNo ratings yet
- Article 17 Ijaet Volii Issue IV Oct Dec 2011Document10 pagesArticle 17 Ijaet Volii Issue IV Oct Dec 2011Mustapha Maiz Hadj AhmedNo ratings yet
- B777 ChecklistDocument2 pagesB777 ChecklistMarkus Schütz100% (1)
- Weg CFW500 Enc PDFDocument32 pagesWeg CFW500 Enc PDFFabio Pedroso de Morais100% (1)
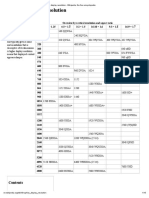
- Graphics Display Resolution - Wikipedia, The Free EncyclopediaDocument15 pagesGraphics Display Resolution - Wikipedia, The Free EncyclopediaKarun KumarNo ratings yet
- 15mm K115 GW-S CUP STD (SH005 1014 B)Document2 pages15mm K115 GW-S CUP STD (SH005 1014 B)Ionut BucurNo ratings yet
- 1 Chapter1 Introduction V5.5a1Document13 pages1 Chapter1 Introduction V5.5a1Alejandro LaraNo ratings yet
- Microsoft ISA Server 2006 - Certificate Troubleshooting - Part IIDocument7 pagesMicrosoft ISA Server 2006 - Certificate Troubleshooting - Part IIKhodor AkoumNo ratings yet
- ECSS E ST 50 03C (31july2008)Document43 pagesECSS E ST 50 03C (31july2008)jsadachiNo ratings yet
- A Power Point Presentation On Staad - ProDocument26 pagesA Power Point Presentation On Staad - ProAbu BindongNo ratings yet
- Reviewer NG Water UkinamDocument3 pagesReviewer NG Water UkinamMl KrishaNo ratings yet
- Crimp HandbookDocument24 pagesCrimp Handbookrony_lesbtNo ratings yet
- Wind Energy: by Kushagra JainDocument16 pagesWind Energy: by Kushagra JainAkash TalekarNo ratings yet
- Performance Impact Analysis With KPP Using Application Response Measurement in E-Government SystemsDocument4 pagesPerformance Impact Analysis With KPP Using Application Response Measurement in E-Government SystemsFredrick IshengomaNo ratings yet
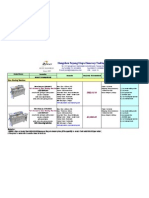
- Quotation For Blue Star Printek From Boway2010 (1) .09.04Document1 pageQuotation For Blue Star Printek From Boway2010 (1) .09.04Arvin Kumar GargNo ratings yet
- CatalogDocument42 pagesCatalogOnerom LeuhanNo ratings yet
- Fit-Up Piping B192-5-S2Document22 pagesFit-Up Piping B192-5-S2Prathamesh OmtechNo ratings yet
- Gym Mega ForceDocument3 pagesGym Mega ForceAnonymous iKb87OINo ratings yet
- AAE 11.3.1 User Guide ClientDocument475 pagesAAE 11.3.1 User Guide Clientme4ias100% (2)
- k2601 enDocument12 pagesk2601 enRobert MasaNo ratings yet
- NNH4-65C-R6-V2: Electrical SpecificationsDocument4 pagesNNH4-65C-R6-V2: Electrical SpecificationsAntony López GálvezNo ratings yet
- How To Calculate Floor Load CapacityDocument3 pagesHow To Calculate Floor Load CapacityNatarajan KrishnanNo ratings yet
- REA 101 Proteccion de Arco EléctricoDocument64 pagesREA 101 Proteccion de Arco EléctricoIngJGMNo ratings yet
- Service Pack 2Document149 pagesService Pack 2billwong169No ratings yet
- 300Mbps/150Mbps Wireless LAN Broadband Router: Quick Installation GuideDocument2 pages300Mbps/150Mbps Wireless LAN Broadband Router: Quick Installation GuideLuis AngelNo ratings yet
- Rcfe Contract SSHDocument240 pagesRcfe Contract SSHJeanne MarshNo ratings yet
- 11kv BB1Document1 page11kv BB1Hammadiqbal12No ratings yet
- Regional VP Sales Director in USA Resume Margo PappDocument2 pagesRegional VP Sales Director in USA Resume Margo PappMargoPappNo ratings yet