You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- API Spec 16C - Specification For Choke and Kill SytemsDocument4 pagesAPI Spec 16C - Specification For Choke and Kill SytemsTg TarroNo ratings yet
- Fabric Structurefabric StructureDocument61 pagesFabric Structurefabric Structurerichuricha100% (1)
- 0042-11 Injection Actuation Pressure Output FaultDocument1 page0042-11 Injection Actuation Pressure Output FaultHamilton Miranda100% (3)
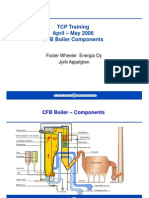
- TCP Training April - May 2006 CFB Boiler Components: Foster Wheeler Energia Oy Jyrki AppelgrenDocument43 pagesTCP Training April - May 2006 CFB Boiler Components: Foster Wheeler Energia Oy Jyrki AppelgrenMadan Yadav100% (3)
- 2.mechanical SealsDocument45 pages2.mechanical Sealspsk.pranesh5520No ratings yet
- Vol. II - Design Report PDFDocument240 pagesVol. II - Design Report PDFDushyant JadaunNo ratings yet
- Brochure Sinumerik 840d SLDocument28 pagesBrochure Sinumerik 840d SLmihir123786No ratings yet
- Es 13 THR: Problem Set Part I. Stresses and Strains (Submission Is On February 5, 2018 Before 5 PM)Document3 pagesEs 13 THR: Problem Set Part I. Stresses and Strains (Submission Is On February 5, 2018 Before 5 PM)akosikapitansinoNo ratings yet
- Manual PartsDocument125 pagesManual PartsAlejandro AguirreNo ratings yet
- Bagasse Compaction - Interim Report Research Report No 5 81 PDFDocument51 pagesBagasse Compaction - Interim Report Research Report No 5 81 PDFCrisanto JimmyNo ratings yet
- C D SeriesDocument16 pagesC D SeriesAlejandro AguirreNo ratings yet
- 2000 - Moor - Belt Vs Chain-Slat BagasseDocument5 pages2000 - Moor - Belt Vs Chain-Slat BagasseAlejandro AguirreNo ratings yet
- 1994 - Bernhardt - Dry Cleaning of SugarcaneDocument6 pages1994 - Bernhardt - Dry Cleaning of SugarcaneAlejandro AguirreNo ratings yet
- WG 90021Document17 pagesWG 90021Alejandro AguirreNo ratings yet
- Startup Fluid Analysis: Department Editor: Rebekkah MarshallDocument1 pageStartup Fluid Analysis: Department Editor: Rebekkah MarshallAlejandro AguirreNo ratings yet
- ES 230 Graphical Syllabus Spring 2010: Stress Material Properties StrainDocument1 pageES 230 Graphical Syllabus Spring 2010: Stress Material Properties StrainAlejandro AguirreNo ratings yet
- Statics 5: Internal Forces & MomentsDocument6 pagesStatics 5: Internal Forces & MomentsAlejandro AguirreNo ratings yet
- Boiler Terms and DefinitionsDocument23 pagesBoiler Terms and DefinitionsAbdallah MansourNo ratings yet
- MJP Feeling Hot Checkpoints FinalDocument3 pagesMJP Feeling Hot Checkpoints FinalAlejandro AguirreNo ratings yet
- MultiSamp DA CP CheckpointsDocument3 pagesMultiSamp DA CP CheckpointsAlejandro AguirreNo ratings yet
- Soal Prototype Design Lks 2014Document12 pagesSoal Prototype Design Lks 2014Ichal Jelmis JheNo ratings yet
- LinksDocument6 pagesLinksNicolas ValdebenitoNo ratings yet
- GEIT 40008GB Widelatitude Film AGFADocument2 pagesGEIT 40008GB Widelatitude Film AGFARolando Nuñez MonrroyNo ratings yet
- Spesifikasi Pompa Pond & WWTPDocument4 pagesSpesifikasi Pompa Pond & WWTPManekGorisNo ratings yet
- Eg8 Geo Chapter04Document17 pagesEg8 Geo Chapter04Madusanka WeebeddaNo ratings yet
- Capstan and Turret Lathe NotesDocument10 pagesCapstan and Turret Lathe NotesR.PalaniNo ratings yet
- RM08001 JLinkUSBProtocolDocument76 pagesRM08001 JLinkUSBProtocolRahumath AliNo ratings yet
- Laboratory ReportDocument6 pagesLaboratory ReportPrincess Fenix SabioNo ratings yet
- Instructions For Firmware UpdateDocument3 pagesInstructions For Firmware Updatebigandirish23No ratings yet
- DIY Non-Contact Voltage Detector: InstructablesDocument5 pagesDIY Non-Contact Voltage Detector: InstructablesSatheesan PNo ratings yet
- Platform S.41 - Office Desking SystemsDocument24 pagesPlatform S.41 - Office Desking SystemsChairatPardpattanapanichNo ratings yet
- Cp5092 CCT - Unit1 - Part1Document2 pagesCp5092 CCT - Unit1 - Part1tamil_delhiNo ratings yet
- SATCO 630 - Auto Saw InstallationDocument12 pagesSATCO 630 - Auto Saw InstallationmarceloNo ratings yet
- BEAM1224 Data SheetDocument2 pagesBEAM1224 Data SheetWilliam DiasNo ratings yet
- History of Stainless SteelDocument24 pagesHistory of Stainless SteelSaravanan KanagavelNo ratings yet
- At The Airport VocabularyDocument1 pageAt The Airport Vocabularyyax Oj OspinaNo ratings yet
- Current - Lofty BrochureDocument1 pageCurrent - Lofty Brochuresidney drecotteNo ratings yet
- CastepDocument138 pagesCastepkamara7067% (3)
- Saqib Imran 0341-7549889Document24 pagesSaqib Imran 0341-7549889Saqib imranNo ratings yet
- Product Data Sheet: Circuit Breaker Masterpact NW25H1 - 2500 A - 4 Poles - Drawout - W/o Trip UnitDocument2 pagesProduct Data Sheet: Circuit Breaker Masterpact NW25H1 - 2500 A - 4 Poles - Drawout - W/o Trip UnitSaravana Kumar JNo ratings yet
- The Relational ModelDocument58 pagesThe Relational ModelIzza NasirNo ratings yet
- PSD 09 2018 30RB RQ 017-040 30rby 017 033Document26 pagesPSD 09 2018 30RB RQ 017-040 30rby 017 033Constantin294No ratings yet
- Altuglass ManualDocument36 pagesAltuglass Manualpislaruionut9394No ratings yet