You might also like
- Ct2 July 2022 MC MinorDocument3 pagesCt2 July 2022 MC Minorjinto0007No ratings yet
- CT1 JUNE 2022 MC MinorDocument2 pagesCT1 JUNE 2022 MC Minorjinto0007No ratings yet
- Exp2-Largest & Smallest From A SeriesDocument2 pagesExp2-Largest & Smallest From A Seriesjinto0007No ratings yet
- Matrix Keyboard InterfaceDocument90 pagesMatrix Keyboard Interfacejinto0007No ratings yet
- Embedded System DesignDocument8 pagesEmbedded System Designjinto0007No ratings yet
- Co Module Vi 2020Document23 pagesCo Module Vi 2020jinto0007No ratings yet
- Relay InterfacingDocument2 pagesRelay Interfacingjinto0007No ratings yet
- MC - CT1 - Scheme & KeyDocument4 pagesMC - CT1 - Scheme & Keyjinto0007No ratings yet
- MC CT2Document2 pagesMC CT2jinto0007No ratings yet
- Exp1-Data Transfer or Exchange Between Specified Memory LocationsDocument2 pagesExp1-Data Transfer or Exchange Between Specified Memory Locationsjinto0007No ratings yet
- MC CT2Document2 pagesMC CT2jinto0007No ratings yet
- MC CT1Document2 pagesMC CT1jinto0007No ratings yet
- Arm 7 ArchitectureDocument22 pagesArm 7 Architecturejinto0007No ratings yet
- Co Module V 2020Document34 pagesCo Module V 2020jinto0007No ratings yet
- Module 6 CO 2020Document40 pagesModule 6 CO 2020jinto0007No ratings yet
- Interrupt Initiated I/O and DMA in Computer OrganizationDocument67 pagesInterrupt Initiated I/O and DMA in Computer Organizationjinto0007No ratings yet
- ECE Minor Electronics Communication Engineering Model Question PaperDocument7 pagesECE Minor Electronics Communication Engineering Model Question Paperjinto0007No ratings yet
- Arm 7 ArchitectureDocument22 pagesArm 7 Architecturejinto0007No ratings yet
- Model B: Raspberry Pi 4 ComputerDocument6 pagesModel B: Raspberry Pi 4 ComputerKenar716No ratings yet
- Arm 7 ArchitectureDocument22 pagesArm 7 Architecturejinto0007No ratings yet
- EC409 Control Systems (CareerYuga)Document3 pagesEC409 Control Systems (CareerYuga)jinto0007No ratings yet
- Computer OrganizationDocument8 pagesComputer Organizationjinto0007No ratings yet
- Embedded Systems Overview: Characteristics, Examples & DesignDocument10 pagesEmbedded Systems Overview: Characteristics, Examples & Designjinto0007No ratings yet
- Computer OrganizationDocument8 pagesComputer Organizationjinto0007No ratings yet
- GSM 11Document2 pagesGSM 11jinto0007No ratings yet
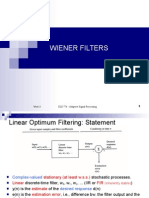
- Winer FilterDocument42 pagesWiner Filterjinto0007No ratings yet
- Arm 7 ArchitectureDocument22 pagesArm 7 Architecturejinto0007No ratings yet
- Transmultiplexer Filter BanksDocument9 pagesTransmultiplexer Filter Banksjinto0007No ratings yet
- TMH EmbeddedDocument49 pagesTMH EmbeddedSRINIVASANNo ratings yet
- Types of ResistorsDocument28 pagesTypes of Resistorsjinto0007100% (3)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- IJPEM 1261129 1141Dec2011EnergyHarvesting PDFDocument14 pagesIJPEM 1261129 1141Dec2011EnergyHarvesting PDFChimzy IwumuneNo ratings yet
- Electric Circuits McqsDocument6 pagesElectric Circuits McqsSharaz AliNo ratings yet
- Superposition TheoremDocument48 pagesSuperposition Theoremandrew smithNo ratings yet
- Metallic Bonding - 2 - Band TheoryDocument22 pagesMetallic Bonding - 2 - Band Theorysherin joyNo ratings yet
- Java RingDocument12 pagesJava RingMegha OmshreeNo ratings yet
- Maximizing Solar Energy Collection Through TrackingDocument3 pagesMaximizing Solar Energy Collection Through Trackingtakethebow runNo ratings yet
- PSIM User ManualDocument216 pagesPSIM User Manualjubin_eldho100% (1)
- Datasheet Led 3MMDocument5 pagesDatasheet Led 3MMVictor Chavez torresNo ratings yet
- Kyocera 140W Modulo SolarDocument2 pagesKyocera 140W Modulo SolarrockydarkNo ratings yet
- STP60NS04Z: N-Channel Clamped 10M - 60A TO-220 Fully Protected Mesh Overlay™ MosfetDocument8 pagesSTP60NS04Z: N-Channel Clamped 10M - 60A TO-220 Fully Protected Mesh Overlay™ MosfetВлад НNo ratings yet
- Plessey Radar and Radio Communications IC Handbook 1980Document445 pagesPlessey Radar and Radio Communications IC Handbook 1980Roberto BernerNo ratings yet
- Physics Project Report XII Light Dependence ReistanceDocument11 pagesPhysics Project Report XII Light Dependence ReistancePankaj Gill72% (65)
- Galaxy Electrical: Zener DiodesDocument3 pagesGalaxy Electrical: Zener Diodesdragon-red0816No ratings yet
- MC33030 DC Servo Motor Controller/Driver: Marking DiagramsDocument17 pagesMC33030 DC Servo Motor Controller/Driver: Marking DiagramsAndrés ThompsonNo ratings yet
- Ti4175 - TBCWP BrochureDocument2 pagesTi4175 - TBCWP Brochureapi-36492444No ratings yet
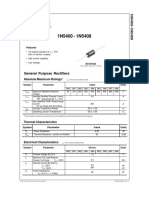
- 1N5400 - 1N5408, Diodes DataSheetDocument3 pages1N5400 - 1N5408, Diodes DataSheetayhamsito wordNo ratings yet
- Atmel 42365 SAM C21 DatasheetDocument1,194 pagesAtmel 42365 SAM C21 Datasheetalex diazNo ratings yet
- Multiplexer and DemultiplexerDocument12 pagesMultiplexer and Demultiplexermarck_camamaNo ratings yet
- Electronics For Dummies Cheat Sheet GuideDocument21 pagesElectronics For Dummies Cheat Sheet Guidedjamter75% (4)
- Climpper Clamper and Transistor ExperimentDocument7 pagesClimpper Clamper and Transistor ExperimentBryan SmithNo ratings yet
- FP5217Document14 pagesFP5217عبدالله ابراهيمNo ratings yet
- WILMAR™ Protective Relays - 1800 SeriesDocument2 pagesWILMAR™ Protective Relays - 1800 SeriesmateusT850No ratings yet
- Conducting PolymersDocument21 pagesConducting PolymersSanthanam King100% (2)
- GRZ100D 6F2S0851 0.8rDocument462 pagesGRZ100D 6F2S0851 0.8rTiffany BeachNo ratings yet
- Automatic Street LightDocument60 pagesAutomatic Street LightYogesh Kadam 813100% (1)
- Orion 1329Document17 pagesOrion 1329Victor Antonio Rojas RojasNo ratings yet
- Digital Counter (Autosaved)Document15 pagesDigital Counter (Autosaved)Kris BajajNo ratings yet
- Manual Tesla PDFDocument40 pagesManual Tesla PDFIon Mitu100% (1)
- BJT FundamentalsDocument33 pagesBJT FundamentalsSamreen ShabbirNo ratings yet
- Comprehen With Answers PDFDocument242 pagesComprehen With Answers PDFAkshit Mathur0% (1)