You might also like
- Arduino - SPIDocument4 pagesArduino - SPIMuhammad Fikri100% (1)
- Advanced View Pic Microcontroller Projects List - PIC MicrocontrollerDocument307 pagesAdvanced View Pic Microcontroller Projects List - PIC MicrocontrollerBilal AfzalNo ratings yet
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemFrom EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemNo ratings yet
- Basic Input and Output CHAPTER 7Document13 pagesBasic Input and Output CHAPTER 7Azim SyahmiNo ratings yet
- A Unity Power Factor Bridgeless Isolated Cuk Converter-Fed Brushless DC Motor DriveDocument4 pagesA Unity Power Factor Bridgeless Isolated Cuk Converter-Fed Brushless DC Motor DriveMaruthi JacsNo ratings yet
- Home Appliance Switching Mini ProjectDocument6 pagesHome Appliance Switching Mini ProjectTony ThomasNo ratings yet
- Industrial Reference Design Platform: Microcontroller CoreDocument22 pagesIndustrial Reference Design Platform: Microcontroller Coreakatyal225813No ratings yet
- Microcontroller HardwareDocument45 pagesMicrocontroller HardwaredineshlathiaNo ratings yet
- 438 6 Linux I2C SMBusDocument7 pages438 6 Linux I2C SMBusragunath32527117No ratings yet
- Transitioning To MPLAB®X IDEDocument173 pagesTransitioning To MPLAB®X IDEvelcroNo ratings yet
- MA1Document143 pagesMA1Manish NarkhedeNo ratings yet
- Wind Turbine MPPT Regulator v2.3 120120Document36 pagesWind Turbine MPPT Regulator v2.3 120120EdwinDuranJr.100% (1)
- Microcontroller Based Street Light Controller Using RTC: Block DiagramDocument1 pageMicrocontroller Based Street Light Controller Using RTC: Block Diagramsageetha756No ratings yet
- Avr AtmegaDocument309 pagesAvr AtmegakcraussNo ratings yet
- Real Time Clock and Sensor Based Street Light ControlDocument3 pagesReal Time Clock and Sensor Based Street Light ControldileeppatraNo ratings yet
- Arduino BreadBoard Advance Kit User Guide v2.1 r2Document23 pagesArduino BreadBoard Advance Kit User Guide v2.1 r2Theodore Meimarakis100% (1)
- Embedded SystemsDocument54 pagesEmbedded SystemsAnkur Kumar100% (1)
- Whirlpool Awod 47115Document20 pagesWhirlpool Awod 47115Adrian GrigoreNo ratings yet
- PWM Motor ControllerDocument44 pagesPWM Motor ControllerTrương Tuấn VũNo ratings yet
- PICME User Guide PDFDocument22 pagesPICME User Guide PDFJasperjames BaldevizoNo ratings yet
- Unit 4 - Power Supply, DC Voltmeter, DC Ammeter SASTRA UniversityDocument25 pagesUnit 4 - Power Supply, DC Voltmeter, DC Ammeter SASTRA UniversitystarNo ratings yet
- MicroPIC18F Lite User ManualDocument19 pagesMicroPIC18F Lite User ManualElena Gilbert100% (1)
- Capacitors: II. CompositionDocument5 pagesCapacitors: II. CompositionJustine jerome FloranteNo ratings yet
- Power Supply Trainer Using Lm723 IcDocument8 pagesPower Supply Trainer Using Lm723 IcDinesh Kumar MehraNo ratings yet
- Project Status Review Semester: 7 EE (Group No: 2) Project I (2170001)Document51 pagesProject Status Review Semester: 7 EE (Group No: 2) Project I (2170001)UmangNo ratings yet
- How To Program The STM32 - Blue Pill - With Arduino IDE - Arduino - Maker Pro PDFDocument11 pagesHow To Program The STM32 - Blue Pill - With Arduino IDE - Arduino - Maker Pro PDFRaghu VutukuruNo ratings yet
- Mini Development Board: Users GuideDocument44 pagesMini Development Board: Users GuideDHANAPRAKAASHNo ratings yet
- AVR Motor Control PDFDocument15 pagesAVR Motor Control PDFjp149100% (1)
- SMPS Control CircuitDocument5 pagesSMPS Control CircuitNAYEEM100% (1)
- Capacitor Start Induction Motor - Its Phasor Diagram Characteristic & Applications - Circuit GlobeDocument9 pagesCapacitor Start Induction Motor - Its Phasor Diagram Characteristic & Applications - Circuit Globejeet kumarNo ratings yet
- DC/DC Converter Operation GuideDocument6 pagesDC/DC Converter Operation GuidesaeidraminaNo ratings yet
- Laboratory Manual Operational Amplifiers and Linear Integrated Circuits FioreDocument210 pagesLaboratory Manual Operational Amplifiers and Linear Integrated Circuits FioreĐoàn Tiến ĐạtNo ratings yet
- Micro ControllerDocument41 pagesMicro ControllerSaravana RajaNo ratings yet
- FINALDocument53 pagesFINALnasifjanjuaNo ratings yet
- Atmel AVR MicrocontrollerDocument63 pagesAtmel AVR MicrocontrollererwinNo ratings yet
- Programming RASPBERRY PI PICO With ARDUINO IDE HowDocument9 pagesProgramming RASPBERRY PI PICO With ARDUINO IDE HowFranco PalumboNo ratings yet
- Arduino and Nano33 Ble SenseDocument31 pagesArduino and Nano33 Ble Sensepc100xohmNo ratings yet
- Micro III Direct Communications SetupDocument1 pageMicro III Direct Communications SetupIre Erick100% (1)
- Virtual WireDocument13 pagesVirtual WirePedro Nuno Sabugueiro OliveiraNo ratings yet
- Micro Board Rev 5Document50 pagesMicro Board Rev 5Arman100% (1)
- Arduino - Learning 1 200 PDFDocument200 pagesArduino - Learning 1 200 PDFbeffa365100% (1)
- An203 - c8051fxxx Printed Circuit Board Design Notes - Silicon - LabsDocument22 pagesAn203 - c8051fxxx Printed Circuit Board Design Notes - Silicon - LabsEdson PaivaNo ratings yet
- 555 Timer CircuitDocument5 pages555 Timer CircuitMack San MiguelNo ratings yet
- Messenger Development Without Internet Using Zigbee TechnologyDocument89 pagesMessenger Development Without Internet Using Zigbee TechnologyRaghu ReddyNo ratings yet
- Operational Amplifiers and Linear Integrated Circuits (K. Lal. Kishore) (Z-Library)Document713 pagesOperational Amplifiers and Linear Integrated Circuits (K. Lal. Kishore) (Z-Library)Pravin Kumar0% (1)
- Arduino Circuits and Projects Guide - ElektorDocument1 pageArduino Circuits and Projects Guide - Elektortsegay100% (2)
- GuardiumDocument2 pagesGuardiummamoutoubNo ratings yet
- PIC Power SupplyDocument0 pagesPIC Power Supplyaqdus100% (1)
- Beee Unit 3 RegulatorsDocument35 pagesBeee Unit 3 RegulatorsgnanalakshmiNo ratings yet
- "Keypad and LCD Interfacing Using MicrocontrollerDocument23 pages"Keypad and LCD Interfacing Using MicrocontrollerKamal PatidarNo ratings yet
- Esp32 Wroom 32d - Esp32 Wroom 32u - Datasheet - enDocument28 pagesEsp32 Wroom 32d - Esp32 Wroom 32u - Datasheet - enFranco Rivadeneyra100% (1)
- nRF52840 PS v1.5Document631 pagesnRF52840 PS v1.5Benyamin Farzaneh AghajarieNo ratings yet
- LC22-24LE250 - 17MB95S SM - June2013 PDFDocument106 pagesLC22-24LE250 - 17MB95S SM - June2013 PDFAnonymous h80fVWNo ratings yet
- Bootloader PDFDocument2 pagesBootloader PDFAyush Kumar100% (1)
- Programming PIC Microcontrollers in CDocument126 pagesProgramming PIC Microcontrollers in CShomeswaran Mugunthan100% (3)
- Real Heat Engines and RefrigeratorsDocument11 pagesReal Heat Engines and RefrigeratorsMario MikulandraNo ratings yet
- Q: How Do Stirling Engines Work?: A: Stirling Engines Can Be Hard To Understand. Here Are The Key Points. EveryDocument35 pagesQ: How Do Stirling Engines Work?: A: Stirling Engines Can Be Hard To Understand. Here Are The Key Points. EveryNavneet SharmaNo ratings yet
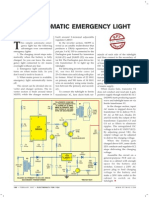
- Auto Emergency LightDocument1 pageAuto Emergency LightAsad AbbasNo ratings yet
- Stirling EngineDocument12 pagesStirling EngineEvo Rosyid PluuksegaranNo ratings yet
- Some Interesting Aspects of MeditationDocument9 pagesSome Interesting Aspects of MeditationAspirant100% (1)
- Implosion - Viktor - SchaubergerDocument134 pagesImplosion - Viktor - SchaubergerGilgames Ex100% (1)
- Hydrofluoric Acid: Chemical Safety InformationDocument5 pagesHydrofluoric Acid: Chemical Safety InformationAditya GannamarajuNo ratings yet
- 18th Century Chemical TermsDocument50 pages18th Century Chemical TermsRaziel Vaggelis GourgoulianisNo ratings yet
- Makingsilicon tcm18-188834Document3 pagesMakingsilicon tcm18-188834Aditya GannamarajuNo ratings yet
- FAQ in JSP (Java Server Pages)Document11 pagesFAQ in JSP (Java Server Pages)Aditya GannamarajuNo ratings yet
- Pbs CellsDocument21 pagesPbs CellsAditya GannamarajuNo ratings yet
- India Truth Alone TriumphsDocument122 pagesIndia Truth Alone TriumphsAditya GannamarajuNo ratings yet
- OscillatorsDocument21 pagesOscillatorsemancavNo ratings yet
- Design de Oscilador SenoidalDocument5 pagesDesign de Oscilador Senoidalroymer lopezNo ratings yet
- Stirling Engine ProposalDocument8 pagesStirling Engine ProposalSaibhargavi BkNo ratings yet
- OscillatorsDocument21 pagesOscillatorsemancavNo ratings yet
- Spectral Investigations of Chemical Bath Deposited Zinc Oxide Thin Films - Ammonia Gas SensorDocument9 pagesSpectral Investigations of Chemical Bath Deposited Zinc Oxide Thin Films - Ammonia Gas SensorAditya GannamarajuNo ratings yet
- Turning Point EbookDocument16 pagesTurning Point EbookDaksh BajoriaNo ratings yet
- Guest Introduction: The Changing Shape of Computer Vision in The Twenty-First CenturyDocument8 pagesGuest Introduction: The Changing Shape of Computer Vision in The Twenty-First CenturyAditya GannamarajuNo ratings yet
- Cara Membuat Magnet TetapDocument31 pagesCara Membuat Magnet TetapkurindumuNo ratings yet
- How To Disable Certain Internet Protocol Version 6 (IPv6) Components in Windows Vista, Windows 7 and Windows Server 2008Document2 pagesHow To Disable Certain Internet Protocol Version 6 (IPv6) Components in Windows Vista, Windows 7 and Windows Server 2008joojgo3569No ratings yet
- InstructionsDocument1 pageInstructionsAbu Afza Al-GhifariNo ratings yet
- OpenSolaris DTrace - Harry J Foxwell PDFDocument181 pagesOpenSolaris DTrace - Harry J Foxwell PDFÉcio FerreiraNo ratings yet
- Presentation For Edge Modulation Using 8 PSKDocument8 pagesPresentation For Edge Modulation Using 8 PSKtrazer8No ratings yet
- Silent Call Guideline v3Document5 pagesSilent Call Guideline v3bybjNo ratings yet
- USSD Center Databook enDocument19 pagesUSSD Center Databook enmail4290No ratings yet
- Zixi Edge Points Data SheetDocument4 pagesZixi Edge Points Data SheetEmil GhiciNo ratings yet
- Token Bus (IEEE 802)Document9 pagesToken Bus (IEEE 802)anon_185146696No ratings yet
- Schlumberger Licensing User GuideDocument32 pagesSchlumberger Licensing User GuideBjorn Kjell-eric AsiaNo ratings yet
- Matlab: Am and FM Modulation: Experiment NumberDocument2 pagesMatlab: Am and FM Modulation: Experiment NumberAtharva LeleNo ratings yet
- Random MergedDocument839 pagesRandom MergedAnonymous WQZvNONo ratings yet
- Scribd Metadata Spreadsheet: Template Version PublisherDocument6 pagesScribd Metadata Spreadsheet: Template Version PublisherPost-Publication Blue RoseNo ratings yet
- DrillWell v2.6 - User ManualDocument358 pagesDrillWell v2.6 - User ManualJesús LeyvaNo ratings yet
- Advanced Use of C Language: ContentDocument23 pagesAdvanced Use of C Language: ContentsybaritzNo ratings yet
- Hybrid Wireless Mesh Protocol+: Bart Lomiej RodekDocument56 pagesHybrid Wireless Mesh Protocol+: Bart Lomiej RodekraftakNo ratings yet
- NotepadDocument4 pagesNotepadprithrajNo ratings yet
- Digital Signal Processing FundamentalsDocument17 pagesDigital Signal Processing FundamentalsEman ElkhateebNo ratings yet
- PROJECT Fokker F28 Flight TutorialDocument226 pagesPROJECT Fokker F28 Flight TutorialCAOSORIO2004No ratings yet
- Attempt All The Questions: Shree Srijana Bidhya Mandir Urlabari-6, Morang Second Terminal Examination-2076Document4 pagesAttempt All The Questions: Shree Srijana Bidhya Mandir Urlabari-6, Morang Second Terminal Examination-2076Rtn Rajes MahesshwariNo ratings yet
- AN0060: Bootloader With AES EncryptionDocument16 pagesAN0060: Bootloader With AES EncryptiondavbratNo ratings yet
- Woodward Window StandardDocument2 pagesWoodward Window StandardMihai MateiNo ratings yet
- USDOR 0911-1013 Ab - Part25Document250 pagesUSDOR 0911-1013 Ab - Part25TeaPartyCheerNo ratings yet
- Thin Film Transistor Models Aimspice Sample SimulationDocument6 pagesThin Film Transistor Models Aimspice Sample SimulationhongyuheNo ratings yet
- pcs7 Readme - en US PDFDocument88 pagespcs7 Readme - en US PDFFiras BorcheniNo ratings yet
- Petrel Training ManualDocument5 pagesPetrel Training ManualMaryam Islam33% (3)
- Top 20 CCNA Interview Questions and AnswersDocument4 pagesTop 20 CCNA Interview Questions and Answerstaha aliNo ratings yet
- Functional Design Specification NetworkDocument33 pagesFunctional Design Specification Networkmoch lutfi100% (1)
- CT Analyzer Whats New V4 40 ENUDocument5 pagesCT Analyzer Whats New V4 40 ENUErnesto SaraviaNo ratings yet
- Asus F82 (Pra Se Basera Pegatron h24z) PDFDocument58 pagesAsus F82 (Pra Se Basera Pegatron h24z) PDFNelson Junior De Oliveira Matos100% (1)
- BTP Topics ECE FinalDocument6 pagesBTP Topics ECE FinalManoj SahuNo ratings yet
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaFrom EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNo ratings yet
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestFrom EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestRating: 4 out of 5 stars4/5 (28)
- The Fabric of Civilization: How Textiles Made the WorldFrom EverandThe Fabric of Civilization: How Textiles Made the WorldRating: 4.5 out of 5 stars4.5/5 (56)
- A Place of My Own: The Architecture of DaydreamsFrom EverandA Place of My Own: The Architecture of DaydreamsRating: 4 out of 5 stars4/5 (241)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureFrom EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureRating: 5 out of 5 stars5/5 (124)
- Pale Blue Dot: A Vision of the Human Future in SpaceFrom EverandPale Blue Dot: A Vision of the Human Future in SpaceRating: 4.5 out of 5 stars4.5/5 (586)
- 35 Miles From Shore: The Ditching and Rescue of ALM Flight 980From Everand35 Miles From Shore: The Ditching and Rescue of ALM Flight 980Rating: 4 out of 5 stars4/5 (21)
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationFrom EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationRating: 4.5 out of 5 stars4.5/5 (46)
- Sully: The Untold Story Behind the Miracle on the HudsonFrom EverandSully: The Untold Story Behind the Miracle on the HudsonRating: 4 out of 5 stars4/5 (101)
- Recording Unhinged: Creative and Unconventional Music Recording TechniquesFrom EverandRecording Unhinged: Creative and Unconventional Music Recording TechniquesNo ratings yet
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseFrom EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseRating: 3.5 out of 5 stars3.5/5 (12)
- The Future of Geography: How the Competition in Space Will Change Our WorldFrom EverandThe Future of Geography: How the Competition in Space Will Change Our WorldRating: 4.5 out of 5 stars4.5/5 (4)
- The Big, Bad Book of Botany: The World's Most Fascinating FloraFrom EverandThe Big, Bad Book of Botany: The World's Most Fascinating FloraRating: 3 out of 5 stars3/5 (10)
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1395)
- A Garden of Marvels: How We Discovered that Flowers Have Sex, Leaves Eat Air, and Other Secrets of PlantsFrom EverandA Garden of Marvels: How We Discovered that Flowers Have Sex, Leaves Eat Air, and Other Secrets of PlantsNo ratings yet
- Reality+: Virtual Worlds and the Problems of PhilosophyFrom EverandReality+: Virtual Worlds and the Problems of PhilosophyRating: 4 out of 5 stars4/5 (24)
- The End of Craving: Recovering the Lost Wisdom of Eating WellFrom EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellRating: 4.5 out of 5 stars4.5/5 (80)
- Transformed: Moving to the Product Operating ModelFrom EverandTransformed: Moving to the Product Operating ModelRating: 4 out of 5 stars4/5 (1)
- The Mushroom at the End of the World: On the Possibility of Life in Capitalist RuinsFrom EverandThe Mushroom at the End of the World: On the Possibility of Life in Capitalist RuinsRating: 4 out of 5 stars4/5 (139)
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansFrom EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansNo ratings yet
- Across the Airless Wilds: The Lunar Rover and the Triumph of the Final Moon LandingsFrom EverandAcross the Airless Wilds: The Lunar Rover and the Triumph of the Final Moon LandingsNo ratings yet
- Inventor of the Future: The Visionary Life of Buckminster FullerFrom EverandInventor of the Future: The Visionary Life of Buckminster FullerRating: 4 out of 5 stars4/5 (10)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Artificial Intelligence: A Guide for Thinking HumansFrom EverandArtificial Intelligence: A Guide for Thinking HumansRating: 4.5 out of 5 stars4.5/5 (30)