You might also like
- The Langevin and Generalised Langevin Approach to the Dynamics of Atomic, Polymeric and Colloidal SystemsFrom EverandThe Langevin and Generalised Langevin Approach to the Dynamics of Atomic, Polymeric and Colloidal SystemsNo ratings yet
- Ijbc DLG 2012 PDFDocument10 pagesIjbc DLG 2012 PDFbdat2010No ratings yet
- An Introduction to Engineering Systems: Pergamon Unified Engineering SeriesFrom EverandAn Introduction to Engineering Systems: Pergamon Unified Engineering SeriesNo ratings yet
- Stefane@it Uu SeDocument27 pagesStefane@it Uu SeRochak JainNo ratings yet
- On Asymptotic Distribution Theory in Segmented Regression ProblemsDocument36 pagesOn Asymptotic Distribution Theory in Segmented Regression Problemscratto6384No ratings yet
- 0022 460x (77) 90521 1 PDFDocument33 pages0022 460x (77) 90521 1 PDFJabbar AljanabyNo ratings yet
- 1.1 Background and MotivationDocument36 pages1.1 Background and MotivationZainab Minhas RajpootNo ratings yet
- David Soloveichik, Georg Seelig and Erik Winfree - DNA As A Universal Substrate For Chemical KineticsDocument6 pagesDavid Soloveichik, Georg Seelig and Erik Winfree - DNA As A Universal Substrate For Chemical KineticsCogsmsNo ratings yet
- Clementi Diffussion MAps JCPDocument11 pagesClementi Diffussion MAps JCPDavid BeveridgeNo ratings yet
- On-The-Fly Reduced Order Modeling of Passive and Reactive Species Via Time-Dependent ManifoldsDocument27 pagesOn-The-Fly Reduced Order Modeling of Passive and Reactive Species Via Time-Dependent ManifoldsAman JalanNo ratings yet
- TMP ADF8Document14 pagesTMP ADF8FrontiersNo ratings yet
- Exact MappingDocument21 pagesExact MappingReember CanoNo ratings yet
- A Test Set For Molecular Dynamics: 1 Introduction and BackgroundDocument30 pagesA Test Set For Molecular Dynamics: 1 Introduction and BackgroundQuyenVuNo ratings yet
- 如何观察相变行为Document36 pages如何观察相变行为xu yanNo ratings yet
- P.C. Bressloff and S. Coombes - Symmetry and Phase-Locking in A Ring of Pulse-Coupled Oscillators With Distributed DelaysDocument24 pagesP.C. Bressloff and S. Coombes - Symmetry and Phase-Locking in A Ring of Pulse-Coupled Oscillators With Distributed DelaysNeerFamNo ratings yet
- Continuous Time Markov Chain Models For Chemical Reaction NetworksDocument44 pagesContinuous Time Markov Chain Models For Chemical Reaction NetworksJchitPNo ratings yet
- Solid-State Kinetic ModelsDocument15 pagesSolid-State Kinetic ModelsmadangkNo ratings yet
- Toward Semantical Model of Reaction-Diffusion ComputingDocument14 pagesToward Semantical Model of Reaction-Diffusion ComputinghilarrisNo ratings yet
- Numerical Simulation of The Flow Across An Asymmetric Street IntersectionDocument14 pagesNumerical Simulation of The Flow Across An Asymmetric Street IntersectionBouarbiLakhdarNo ratings yet
- Nonlinear Dynamical Systems, Their Stability, and ChaosDocument16 pagesNonlinear Dynamical Systems, Their Stability, and ChaosAditya NairNo ratings yet
- Final Author PrintDocument16 pagesFinal Author Printalon manorNo ratings yet
- Reaction Factorization For The Dynamic Analysis of ALD KineticsDocument18 pagesReaction Factorization For The Dynamic Analysis of ALD Kineticslealem sekataNo ratings yet
- A Discrete Model For Resonance Near Embedded Bound States: Volume 2, Number 6, December 2010Document14 pagesA Discrete Model For Resonance Near Embedded Bound States: Volume 2, Number 6, December 2010Sudhakar SpartanNo ratings yet
- Chaos, Solitons and FractalsDocument13 pagesChaos, Solitons and FractalsJoël NoudjeuNo ratings yet
- 1 Notes On The Statistical Mechanics of Systems With Long-Range InteractionsDocument33 pages1 Notes On The Statistical Mechanics of Systems With Long-Range Interactionsbatenas1No ratings yet
- Potential FieldDocument10 pagesPotential FieldHernández Alemán RubénNo ratings yet
- Introduction To The Thermodynamically Constrained Averaging Theory For Porous Medium SystemsDocument609 pagesIntroduction To The Thermodynamically Constrained Averaging Theory For Porous Medium SystemsAna Carla SantanaNo ratings yet
- An Eulerian Lagrangian Scheme For Solving Large Deformation Fluid Structure Interaction ProblemsDocument31 pagesAn Eulerian Lagrangian Scheme For Solving Large Deformation Fluid Structure Interaction ProblemsUmair QaziNo ratings yet
- Frequency Locking in Countable Cellular Systems, Localization of (Asymptotic) Quasi-Periodic Solutions of Autonomous Differential SystemsDocument19 pagesFrequency Locking in Countable Cellular Systems, Localization of (Asymptotic) Quasi-Periodic Solutions of Autonomous Differential SystemsLutfitasari IttaqullohNo ratings yet
- Capecelatro Desjardins 2013 An Euler-Lagrange Strategy For Simulating Particle-Laden Flows PDFDocument31 pagesCapecelatro Desjardins 2013 An Euler-Lagrange Strategy For Simulating Particle-Laden Flows PDFAbgail PinheiroNo ratings yet
- Rolling ResistanceDocument18 pagesRolling ResistanceAsif RajaNo ratings yet
- Estimation of Space-Time Varying Parameters Using A Diffusion LMS AlgorithmDocument16 pagesEstimation of Space-Time Varying Parameters Using A Diffusion LMS AlgorithmAnthony NewmanNo ratings yet
- L. Marchisio, Dennis Vigil, O. Fox - 2003 - Implementation of The Quadrature Method of Moments in CFD Codes For Aggregation-Breakage ProDocument15 pagesL. Marchisio, Dennis Vigil, O. Fox - 2003 - Implementation of The Quadrature Method of Moments in CFD Codes For Aggregation-Breakage ProlgroscheNo ratings yet
- Decoherence in Strongly Coupled Quantum Oscillators: M.A. de Ponte, M.C. de Oliveira, M.H.Y. MoussaDocument35 pagesDecoherence in Strongly Coupled Quantum Oscillators: M.A. de Ponte, M.C. de Oliveira, M.H.Y. Moussagaminster6935No ratings yet
- DMRG Lectures Adrien FeiguinDocument88 pagesDMRG Lectures Adrien FeiguinStephenDedalusNo ratings yet
- Salvetti EtalDocument18 pagesSalvetti Etalyoussef_pcNo ratings yet
- Rossini MPSPBC 2011Document23 pagesRossini MPSPBC 2011Paulo BedaqueNo ratings yet
- Stochastic Hybrid Systems With Renewal TransitionsDocument33 pagesStochastic Hybrid Systems With Renewal TransitionsDuarte Jose AntunesNo ratings yet
- 3.1 Governing Equations: Numerical MethodologyDocument8 pages3.1 Governing Equations: Numerical MethodologyChethan_Srinivas2404No ratings yet
- Assessing The Local Stabilityof Periodic Motions For Large Multibodynon-Linear Systems Using Proper Orthogonal DecompositionDocument24 pagesAssessing The Local Stabilityof Periodic Motions For Large Multibodynon-Linear Systems Using Proper Orthogonal DecompositionRahul BamaniaNo ratings yet
- AIAA 2013 2567 CharestDocument21 pagesAIAA 2013 2567 Charestapoorvs75No ratings yet
- Analysis and CompensationDocument25 pagesAnalysis and Compensationshaho1946No ratings yet
- H. Lim Et Al - Subgrid Models For Mass and Thermal Diffusion in Turbulent MixingDocument39 pagesH. Lim Et Al - Subgrid Models For Mass and Thermal Diffusion in Turbulent MixingMfdrrNo ratings yet
- An Identification Approach For Linear and Nonlinear Time-Variant Structural Systems VDocument15 pagesAn Identification Approach For Linear and Nonlinear Time-Variant Structural Systems V3tarebitarafNo ratings yet
- Mckenzie 2003Document34 pagesMckenzie 2003sierraarellano117No ratings yet
- A Reduced Variational Approach For Searching Cycles in High-Dimensional SystemsDocument25 pagesA Reduced Variational Approach For Searching Cycles in High-Dimensional Systemsim.marzaNo ratings yet
- Storace (2004) - Piecewise-Linear Approximation of Nonlinear Dynamical SystemsDocument13 pagesStorace (2004) - Piecewise-Linear Approximation of Nonlinear Dynamical SystemsSohibul HajahNo ratings yet
- Projects 2015Document45 pagesProjects 2015Steven ArcadoNo ratings yet
- Joel Thorarinson and Marcelo Gleiser - Dynamical Emergence of Complex Structures in Field TheoriesDocument9 pagesJoel Thorarinson and Marcelo Gleiser - Dynamical Emergence of Complex Structures in Field TheoriesPomac232No ratings yet
- 2.maths - Ijms - Nonlinear - Sundaram RDocument8 pages2.maths - Ijms - Nonlinear - Sundaram Riaset123No ratings yet
- Loncharich Et Al-1989-Proteins Structure, Function, and BioinformaticsDocument14 pagesLoncharich Et Al-1989-Proteins Structure, Function, and BioinformaticsDavidFurmanNo ratings yet
- Polymer PaperDocument34 pagesPolymer PapermehtabpathanNo ratings yet
- MD Simulation of Concentrated Polymer Solutions: Structural Relaxation Near The Glass TransitionDocument12 pagesMD Simulation of Concentrated Polymer Solutions: Structural Relaxation Near The Glass Transitionsontu chatterjeeNo ratings yet
- Thèse 2024-2Document3 pagesThèse 2024-2marco andres auzaNo ratings yet
- Entropy 19 00425 v2Document22 pagesEntropy 19 00425 v2Oleg NikitinNo ratings yet
- Paper Equifase09 223CorrelationProgramDocument6 pagesPaper Equifase09 223CorrelationProgramHoward Palomino AhumadaNo ratings yet
- Perona2000 Article OnTheTrajectoryMethodForTheRecDocument21 pagesPerona2000 Article OnTheTrajectoryMethodForTheRecSai SyamNo ratings yet
- DepmixS4 Package For RDocument21 pagesDepmixS4 Package For RneuromiguelNo ratings yet
- Smoothed Particle IdrodynamicsDocument50 pagesSmoothed Particle IdrodynamicsAntonio MarcegagliaNo ratings yet
- Multiple Model Adaptive Control Design For A MIMO Chemical ReactorDocument45 pagesMultiple Model Adaptive Control Design For A MIMO Chemical ReactorFernando RamosNo ratings yet
- Two Boundary Model For Freezing Front Propagation in Biological TissueDocument8 pagesTwo Boundary Model For Freezing Front Propagation in Biological TissuevagafNo ratings yet
- Nonlinear Dynamics Phenomena in Fractional Van Der Pol-Fitzhugh-Nagumo ModelDocument2 pagesNonlinear Dynamics Phenomena in Fractional Van Der Pol-Fitzhugh-Nagumo ModelvagafNo ratings yet
- Quasi-Stationary Stefan Problem and Computer Simulation of Interface DynamicsDocument22 pagesQuasi-Stationary Stefan Problem and Computer Simulation of Interface DynamicsvagafNo ratings yet
- Anomalous Relaxation Oscillations Due To Dynamical Traps: I.A. Lubashevsky, V.V. Gaychuk, A.V. DemchukDocument9 pagesAnomalous Relaxation Oscillations Due To Dynamical Traps: I.A. Lubashevsky, V.V. Gaychuk, A.V. DemchukvagafNo ratings yet
- Zno Nanoparticles Produced by Reactive Laser Ablation: Applied Surface ScienceDocument6 pagesZno Nanoparticles Produced by Reactive Laser Ablation: Applied Surface SciencevagafNo ratings yet
- Replicator - Mutator Evolutionary DynamicsDocument11 pagesReplicator - Mutator Evolutionary DynamicsvagafNo ratings yet
- Physic A A 2004Document9 pagesPhysic A A 2004vagafNo ratings yet
- Oil Immersed Transformer - 1311Document24 pagesOil Immersed Transformer - 1311Abegail BernabeNo ratings yet
- DrilflexDocument4 pagesDrilflexmurdicksNo ratings yet
- Analog - RF VLSI Design (ECE 503) (Makeup) PDFDocument2 pagesAnalog - RF VLSI Design (ECE 503) (Makeup) PDFRahul PinnamaneniNo ratings yet
- Service Menu: Operación de SistemasDocument8 pagesService Menu: Operación de Sistemasjuan castaedaNo ratings yet
- HV Cooling Fan Clutch Pinpoit Test - Ford Powertrain Control Emissions Diagnosis 2007Document9 pagesHV Cooling Fan Clutch Pinpoit Test - Ford Powertrain Control Emissions Diagnosis 2007Ingrid Garcia de Jauregui100% (1)
- Pogil Cellular Respiration-SDocument6 pagesPogil Cellular Respiration-Sapi-262378640No ratings yet
- Lecture 02 - The 1st Law of ThermodynamicsDocument24 pagesLecture 02 - The 1st Law of ThermodynamicsArc ZeroNo ratings yet
- Organicreactionmechanism 160527094347Document55 pagesOrganicreactionmechanism 160527094347Shreyas BhandaryNo ratings yet
- EDR DesignGuidelines VAVDocument331 pagesEDR DesignGuidelines VAVRegina Ng100% (1)
- Theory of ProductionDocument24 pagesTheory of ProductionKanika BakshiNo ratings yet
- Project 4Document11 pagesProject 4Kara WarnerNo ratings yet
- Inorganic Qualitative AnalysisDocument9 pagesInorganic Qualitative AnalysisShireen SuhailNo ratings yet
- SPSS Smart Viewer Evaluation Copy Step-by-Step Evaluation GuideDocument4 pagesSPSS Smart Viewer Evaluation Copy Step-by-Step Evaluation GuideRoxy RoxaNo ratings yet
- Parte1-Description Material and ConclusionsDocument3 pagesParte1-Description Material and ConclusionsLisaNo ratings yet
- Faulty TRXDocument2 pagesFaulty TRXvaibhav151284No ratings yet
- 22-01 Simple Linear Motion 1Document1 page22-01 Simple Linear Motion 1David BumbaloughNo ratings yet
- Differential Equation Evaluation (Quiz) : D. Fourth OrderDocument3 pagesDifferential Equation Evaluation (Quiz) : D. Fourth OrderArmenion Mark AllenNo ratings yet
- Irf2807 International DatasheetDocument8 pagesIrf2807 International DatasheetAdam SchwemleinNo ratings yet
- Concise Guide To Quantum Computing: Sergei Kurgalin Sergei BorzunovDocument129 pagesConcise Guide To Quantum Computing: Sergei Kurgalin Sergei BorzunovVi Kem0% (1)
- TURCKDocument3 pagesTURCKNegreaDanielaNo ratings yet
- Petrel 2013 Property Modeling Course: Module 2: Data PreparationDocument15 pagesPetrel 2013 Property Modeling Course: Module 2: Data PreparationJaninne Campo100% (1)
- Updated Fish Load CalculationDocument3 pagesUpdated Fish Load CalculationMikhail Roy Dela CruzNo ratings yet
- Manuel Guindeau X2Document53 pagesManuel Guindeau X2fr_emailleNo ratings yet
- Cast Iron Gate Valve Non Rising Stem PN16: Features & BenefitsDocument1 pageCast Iron Gate Valve Non Rising Stem PN16: Features & BenefitsMohamed RaafatNo ratings yet
- Strada 2001-2009 PDFDocument309 pagesStrada 2001-2009 PDFFernando MorenoNo ratings yet
- Yuva Nikhil Reddy LonkaDocument9 pagesYuva Nikhil Reddy LonkaankulNo ratings yet
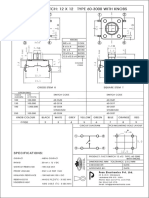
- Tact Micro Switch 12X12Document1 pageTact Micro Switch 12X12Solin CozNo ratings yet
- Sqlassignment 03Document3 pagesSqlassignment 03pokegex798No ratings yet
- Vetco RL Connector Conductor SpecDocument19 pagesVetco RL Connector Conductor Speccv sabira100% (1)
- Testing ResumeDocument4 pagesTesting ResumeBaji TulluruNo ratings yet
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet
- Limitless Mind: Learn, Lead, and Live Without BarriersFrom EverandLimitless Mind: Learn, Lead, and Live Without BarriersRating: 4 out of 5 stars4/5 (6)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Calculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusFrom EverandCalculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusRating: 4.5 out of 5 stars4.5/5 (2)
- Geometric Patterns from Patchwork Quilts: And how to draw themFrom EverandGeometric Patterns from Patchwork Quilts: And how to draw themRating: 5 out of 5 stars5/5 (1)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Math Workshop, Grade K: A Framework for Guided Math and Independent PracticeFrom EverandMath Workshop, Grade K: A Framework for Guided Math and Independent PracticeRating: 5 out of 5 stars5/5 (1)
- Images of Mathematics Viewed Through Number, Algebra, and GeometryFrom EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryNo ratings yet