You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Neural NetworksDocument22 pagesNeural NetworksHarshita GuptaNo ratings yet
- Project Report On Contour DetectionDocument10 pagesProject Report On Contour DetectionRaghav GuptaNo ratings yet
- Multivariable System With Level ControlDocument9 pagesMultivariable System With Level ControlkarthikeyanNo ratings yet
- ANN Introduction & ModelsDocument52 pagesANN Introduction & ModelsSoundarya SvsNo ratings yet
- Machine Learning Based Modeling For Solid Oxide Fuel Cells Power Performance PredictionDocument6 pagesMachine Learning Based Modeling For Solid Oxide Fuel Cells Power Performance PredictionairsrchNo ratings yet
- Short Questions... DbmsDocument10 pagesShort Questions... DbmsMuhammad Jamal ShahNo ratings yet
- ps3 (1) From MAE 4780Document5 pagesps3 (1) From MAE 4780fooz10No ratings yet
- Block Diagram Representation of A Simple Electronic System: Main DefinitionsDocument9 pagesBlock Diagram Representation of A Simple Electronic System: Main DefinitionsCansu ElizadeNo ratings yet
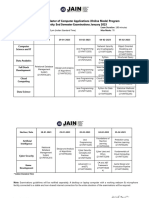
- Online Courses PG MCA Sem II Exam Timetable Jan 2023Document2 pagesOnline Courses PG MCA Sem II Exam Timetable Jan 2023Vinodh NarayanNo ratings yet
- Thesis 1Document39 pagesThesis 1Konki CharishmaNo ratings yet
- Empower Businesses through Data Analytics and Technology InsightsDocument6 pagesEmpower Businesses through Data Analytics and Technology InsightssinghjatinNo ratings yet
- Intelligent Systems Exam QuestionsDocument1 pageIntelligent Systems Exam QuestionsARTARANA BISWA PRASAN DASHNo ratings yet
- Machine Learning Intro FinalDocument74 pagesMachine Learning Intro FinalJelena NađNo ratings yet
- Unified Real-Time Object DetectionDocument36 pagesUnified Real-Time Object Detectionvrashikesh patilNo ratings yet
- Car Make and Model Recognition Using ImaDocument8 pagesCar Make and Model Recognition Using ImaRAna AtIfNo ratings yet
- Systematic Literature Review: Quantum Machine Learning and Its ApplicationsDocument28 pagesSystematic Literature Review: Quantum Machine Learning and Its ApplicationsAshutosh VyasNo ratings yet
- Paragraph Structure by SaiwaroonDocument2 pagesParagraph Structure by Saiwaroonhafidh1922No ratings yet
- Cobots in Folding MethodDocument9 pagesCobots in Folding MethodSayantan RahaNo ratings yet
- Communication Skills Kailas 140603023429 Phpapp01Document137 pagesCommunication Skills Kailas 140603023429 Phpapp01David BrownNo ratings yet
- What Is CommunicationDocument2 pagesWhat Is CommunicationTonexLacanlaleNo ratings yet
- Lyapunov Stability Theory: Peter Al Hokayem and Eduardo Gallestey March 16, 2015Document15 pagesLyapunov Stability Theory: Peter Al Hokayem and Eduardo Gallestey March 16, 2015सुमित नेमाNo ratings yet
- Fuzzy Control RulesDocument5 pagesFuzzy Control RulesJorgeAlfaroArceNo ratings yet
- Adaptive Filtering in Astronomical Image Processing: Very Deep Convolutional Networks For Large-Scale Image RecognitionDocument6 pagesAdaptive Filtering in Astronomical Image Processing: Very Deep Convolutional Networks For Large-Scale Image RecognitionKartikeya ChauhanNo ratings yet
- Characteristics of Human LanguageDocument1 pageCharacteristics of Human LanguageSatya Permadi50% (2)
- DL Lab ManualDocument65 pagesDL Lab ManualmukeshNo ratings yet
- 2009-Microsoft Semantic EngineDocument25 pages2009-Microsoft Semantic EngineLi DingNo ratings yet
- Nonlinear Zero Dynamics in Control SystemsDocument12 pagesNonlinear Zero Dynamics in Control SystemsAshik AhmedNo ratings yet
- AI & ML NotesDocument34 pagesAI & ML NotesSMHC23 Akshay DandadeNo ratings yet
- Week7 Fuzzy Logic TutorialDocument54 pagesWeek7 Fuzzy Logic TutorialGirish PatilNo ratings yet
- Decision TreeDocument28 pagesDecision TreeRishabh GuptaNo ratings yet