You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- AOC+Service+Manual HP 2009v A00+Monitor+LcdDocument58 pagesAOC+Service+Manual HP 2009v A00+Monitor+LcdLuciano MissiasNo ratings yet
- The Network Core: - Mesh of Interconnected RoutersDocument42 pagesThe Network Core: - Mesh of Interconnected RoutersĐào Quỳnh NhưNo ratings yet
- Soldier Tracking and Health Monitoring SystemDocument18 pagesSoldier Tracking and Health Monitoring SystemKavana K GowdaNo ratings yet
- ulvwldq $GDQ 0Hqgr) D +huqdqg H) : Introduccion A La Operación Y Mantenimiento de Siu-02Document39 pagesulvwldq $GDQ 0Hqgr) D +huqdqg H) : Introduccion A La Operación Y Mantenimiento de Siu-02Wilson DiazNo ratings yet
- S2A F Datasheet en GBDocument4 pagesS2A F Datasheet en GBAzhar AliNo ratings yet
- Indraja Chatterjee ResumeDocument2 pagesIndraja Chatterjee Resumeapi-532214657No ratings yet
- OB2273A On BrightDocument10 pagesOB2273A On BrightHamza Abbasi AbbasiNo ratings yet
- Capacitors & Capacitance Calculations Formulas Equations - RF CafeDocument2 pagesCapacitors & Capacitance Calculations Formulas Equations - RF CafeSusan PastranaNo ratings yet
- M100 3G Quick Start Guide User Manual v4Document29 pagesM100 3G Quick Start Guide User Manual v4Karl TagalaNo ratings yet
- CM0416Document116 pagesCM0416Jazz Drum100% (3)
- 7inch HDMI LCD (B) User ManualDocument9 pages7inch HDMI LCD (B) User ManualPerez GeovanniNo ratings yet
- MustefaDocument10 pagesMustefamustefa endris100% (1)
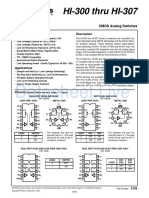
- HI-300 Thru HI-307: Datasheet - LiveDocument10 pagesHI-300 Thru HI-307: Datasheet - LiveDeybbiNo ratings yet
- EE 101 Spring 2022 HW-1Document6 pagesEE 101 Spring 2022 HW-1عمك مطيريNo ratings yet
- NMR Teslameter: User's ManualDocument79 pagesNMR Teslameter: User's ManualANDRESNo ratings yet
- Debashis de - Basic Electronics - For BPUT Subject Code BE-2101-Pearson Education (2011)Document457 pagesDebashis de - Basic Electronics - For BPUT Subject Code BE-2101-Pearson Education (2011)Suraj MateNo ratings yet
- Bandpass Filter TutorialDocument7 pagesBandpass Filter TutorialJaideep BoseNo ratings yet
- Simplex Half and Full DuplexDocument4 pagesSimplex Half and Full DuplexM.E. Sarwar LemonNo ratings yet
- LTSpiceDocument21 pagesLTSpicedellxps3941No ratings yet
- Low Power Wireless Technologies: Roman Budek - NXP APEC 2013 EH Forum Industry SessionDocument26 pagesLow Power Wireless Technologies: Roman Budek - NXP APEC 2013 EH Forum Industry SessionMimiEdreesNo ratings yet
- Unit 1 - ARM7Document67 pagesUnit 1 - ARM7Makrand KakatkarNo ratings yet
- A Comparative Analysis On Smart Home System To Control, Monitor and Secure Home, Based On Technologies Like GSM, IOT, Bluetooth and PIC Microcontroller With ZigBee ModulationDocument4 pagesA Comparative Analysis On Smart Home System To Control, Monitor and Secure Home, Based On Technologies Like GSM, IOT, Bluetooth and PIC Microcontroller With ZigBee ModulationSunny Singh100% (1)
- Ancillary Data MonitoringDocument44 pagesAncillary Data MonitoringjorgeluisalazarNo ratings yet
- Chapter 4 PLCDocument38 pagesChapter 4 PLCDilip TheLip100% (1)
- GSM 03.18 Ts 101043v050600pDocument169 pagesGSM 03.18 Ts 101043v050600phs_soni2457No ratings yet
- Repair Station Capability L Station Id Ld7r612j RCD CHG Added Rockwell Collins CockpitDocument20 pagesRepair Station Capability L Station Id Ld7r612j RCD CHG Added Rockwell Collins CockpitAdel KhelifiNo ratings yet
- USSD Call Flows PDFDocument2 pagesUSSD Call Flows PDFAntariksha SinghNo ratings yet
- Transformer Protection SchemesDocument5 pagesTransformer Protection SchemesIppiNo ratings yet
- ModulationDocument9 pagesModulationJaneNo ratings yet
- Tdoct5999a UsaDocument100 pagesTdoct5999a UsambidNo ratings yet