You might also like
- The Magnetic Center Finding Using Vibrating Wire TechniqueDocument6 pagesThe Magnetic Center Finding Using Vibrating Wire TechniqueHatem AbdelrahmanNo ratings yet
- Practical Solutions To Machinery and Maintenance Vibration Problems Chapter 7, Misalignment Section 4, Machinery Soft FeetDocument2 pagesPractical Solutions To Machinery and Maintenance Vibration Problems Chapter 7, Misalignment Section 4, Machinery Soft FeetHatem AbdelrahmanNo ratings yet
- WEG HGF Low and High Voltage High Performance Electric Motor Range Broa017 Brochure EnglishDocument40 pagesWEG HGF Low and High Voltage High Performance Electric Motor Range Broa017 Brochure EnglishHatem AbdelrahmanNo ratings yet
- Customer Application Centers: Global Accessibility To Our TechnologyDocument1 pageCustomer Application Centers: Global Accessibility To Our TechnologyHatem AbdelrahmanNo ratings yet
- Don't Get Soft: Cover Series: Installation Best PracticesDocument6 pagesDon't Get Soft: Cover Series: Installation Best PracticesHatem Abdelrahman100% (1)
- Fault Zone - : Air GapDocument0 pagesFault Zone - : Air GapHatem AbdelrahmanNo ratings yet
- Kingsbury Leg ComponentsDocument3 pagesKingsbury Leg ComponentsHatem Abdelrahman100% (1)
- Why Upgrades Are Important - : Some Lessons Learned With Older Monitoring SystemsDocument2 pagesWhy Upgrades Are Important - : Some Lessons Learned With Older Monitoring SystemsHatem AbdelrahmanNo ratings yet
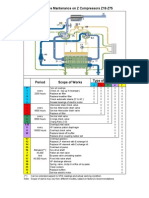
- Preventive Mantenance On Z Compressors Z18-Z75: Take All ReadingsDocument1 pagePreventive Mantenance On Z Compressors Z18-Z75: Take All ReadingsHatem AbdelrahmanNo ratings yet
- IBERDROLA's Center For Monitoring, Diagnostic and Simulation (CMDS) of Combined-Cycle Power PlantsDocument4 pagesIBERDROLA's Center For Monitoring, Diagnostic and Simulation (CMDS) of Combined-Cycle Power PlantsHatem AbdelrahmanNo ratings yet
- Ontario Power Generation's Nanticoke Power PlantDocument3 pagesOntario Power Generation's Nanticoke Power PlantHatem AbdelrahmanNo ratings yet
- Best Practices: Asset Condition ManagementDocument2 pagesBest Practices: Asset Condition ManagementHatem AbdelrahmanNo ratings yet
- Helping You ... : Fourth Quarter 1999 Vol. 20 No. 4Document1 pageHelping You ... : Fourth Quarter 1999 Vol. 20 No. 4Hatem AbdelrahmanNo ratings yet
- 2 Q 01 HanifanDocument2 pages2 Q 01 HanifanHatem AbdelrahmanNo ratings yet
- Payback Profile:: Suncor Uses Bently Nevada To Increase Profitability - Part 2Document6 pagesPayback Profile:: Suncor Uses Bently Nevada To Increase Profitability - Part 2Hatem AbdelrahmanNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Moment InertiaDocument18 pagesMoment InertiaHamka HidayahNo ratings yet
- IndoorsDocument81 pagesIndoorssshhhaaaaaNo ratings yet
- Fyc7 - System of Particles & Rotational Motion - Conceptual Mcqs - (116Q)Document18 pagesFyc7 - System of Particles & Rotational Motion - Conceptual Mcqs - (116Q)Hema PriyaNo ratings yet
- Exercise - 1 To 3 PC Circular Motion ResoDocument15 pagesExercise - 1 To 3 PC Circular Motion ResoZenith xNo ratings yet
- Machine Foundation For Rotary MachineDocument88 pagesMachine Foundation For Rotary MachineAkarshGowdaNo ratings yet
- UNIT 2 (B) Dynamic Force AnalysisDocument39 pagesUNIT 2 (B) Dynamic Force AnalysisSAI PRAMOD RAVADANo ratings yet
- 657f2fc1ba44990018f402f1 ## Practice Test-04 Question PaperDocument18 pages657f2fc1ba44990018f402f1 ## Practice Test-04 Question PaperSiya JaniNo ratings yet
- Chapter 1 - Lecture 1 - 20-12-2011-1Document15 pagesChapter 1 - Lecture 1 - 20-12-2011-1Suhas KandeNo ratings yet
- Acople Flender Highly Flexible CouplingsDocument88 pagesAcople Flender Highly Flexible Couplingsmarcelo castilloNo ratings yet
- General Physics 1 Quarter 2 WEEK 1Document6 pagesGeneral Physics 1 Quarter 2 WEEK 1Normal FanNo ratings yet
- STD 10physics Force SolutionsDocument38 pagesSTD 10physics Force SolutionsHemant ChaudhariNo ratings yet
- Rotor Balancing Simulator: Fourth Year Graduation ProjectDocument21 pagesRotor Balancing Simulator: Fourth Year Graduation ProjectMahmoud SamirNo ratings yet
- Cbse Xi Physics Test PapersDocument14 pagesCbse Xi Physics Test PapersBhavesh DesaiNo ratings yet
- Faizul Amin Barch.1602008021 L2-T1Document67 pagesFaizul Amin Barch.1602008021 L2-T1Faizul Amin NayanNo ratings yet
- Precision Machine Design Error BudgetDocument66 pagesPrecision Machine Design Error Budgetnz578427100% (1)
- Hand Out On Rotational DynamicsDocument7 pagesHand Out On Rotational DynamicsLorna BacligNo ratings yet
- 2003 Aipmt Pre English 13660 13897 PDFDocument18 pages2003 Aipmt Pre English 13660 13897 PDFCvcNo ratings yet
- Fundamentals of RoboticsDocument19 pagesFundamentals of RoboticsdharshanirymondNo ratings yet
- ORBIT v30n1 2010 r15Document60 pagesORBIT v30n1 2010 r15mathewaj100% (1)
- Screw Thread Friction PDFDocument4 pagesScrew Thread Friction PDFKeith Tanaka MagakaNo ratings yet
- New Charge Frozen Protection For MillDocument14 pagesNew Charge Frozen Protection For Milljuan_fimNo ratings yet
- Foundations and Geotechnical HazardsDocument22 pagesFoundations and Geotechnical Hazardskwon777No ratings yet
- R-J3iC AuxAxis Setup Manual (System Installation Manual MARFCINST09051E REV.B)Document62 pagesR-J3iC AuxAxis Setup Manual (System Installation Manual MARFCINST09051E REV.B)trangovicNo ratings yet
- Solid MechanicsDocument342 pagesSolid MechanicsRodrigo MarinNo ratings yet
- SKF Plain BearingDocument36 pagesSKF Plain Bearinga04205No ratings yet
- VSF - Symbols and FormulasDocument2 pagesVSF - Symbols and FormulasHassan MoazenNo ratings yet
- Bearing CatalogueDocument107 pagesBearing CatalogueSheikh ZakirNo ratings yet
- Dynamic Behaviour of Electric Drives: Fundamental Torque EquationsDocument10 pagesDynamic Behaviour of Electric Drives: Fundamental Torque EquationsEthio Dangote TubeNo ratings yet
- Quiz 1Document6 pagesQuiz 1Eliza Mae Aquino100% (1)