You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Passive Filter vs. Active Filter: DefinitionsDocument3 pagesPassive Filter vs. Active Filter: DefinitionsAmit DebnathNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Distribution SubstationDocument8 pagesDistribution SubstationAmit Debnath100% (1)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Bus-Bar ArrangementDocument8 pagesBus-Bar ArrangementAmit DebnathNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Beyond Syllabus Training On Off Grid Solar System: Phase-IDocument28 pagesBeyond Syllabus Training On Off Grid Solar System: Phase-IAmit DebnathNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- EE - S4 - EM-II - 25.03.2020 (Types and Construction of Alternator)Document12 pagesEE - S4 - EM-II - 25.03.2020 (Types and Construction of Alternator)Amit DebnathNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Short Type Questions of Three Phase Induction Motor - 01.04.2020Document5 pagesShort Type Questions of Three Phase Induction Motor - 01.04.2020Amit DebnathNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Protective Relays: B.TECH/EE/EE-602Document4 pagesProtective Relays: B.TECH/EE/EE-602Amit DebnathNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Single Phase MotorsDocument4 pagesSingle Phase MotorsAmit DebnathNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Induction Machines 02 - STDNTDocument9 pagesInduction Machines 02 - STDNTAmit DebnathNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Stabilization of Gird Connected Wind Generator During Power Network Disturbances by StatcomDocument5 pagesStabilization of Gird Connected Wind Generator During Power Network Disturbances by StatcomAmit DebnathNo ratings yet
- New Doc 2019-02-11 09.00.03-20190211092630Document5 pagesNew Doc 2019-02-11 09.00.03-20190211092630Amit DebnathNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Electrical Fuse HRC Fuse High Rupturing Capacity - Electrical EngineeringDocument5 pagesElectrical Fuse HRC Fuse High Rupturing Capacity - Electrical EngineeringAmit DebnathNo ratings yet
- A Novel Method of Power Flow Analysis With UPFC Considering Limit Violations of VariableDocument5 pagesA Novel Method of Power Flow Analysis With UPFC Considering Limit Violations of VariableAmit DebnathNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Study of The Simulation of DC Traction Power Supply System Based On AC/DC Unified Newton-Raphson MethodDocument4 pagesStudy of The Simulation of DC Traction Power Supply System Based On AC/DC Unified Newton-Raphson MethodAmit DebnathNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Kraft,: To NotDocument13 pagesKraft,: To NotAmit DebnathNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Three-Phase STATCOM Models For Large-Scale Newton-Raphson Power Flow StudiesDocument6 pagesThree-Phase STATCOM Models For Large-Scale Newton-Raphson Power Flow StudiesAmit DebnathNo ratings yet
- Automatic Sun Tracking System - ASTSDocument15 pagesAutomatic Sun Tracking System - ASTSAmit DebnathNo ratings yet
- Phase Noise and Frequency StabilityDocument114 pagesPhase Noise and Frequency StabilityCharles FarhleyNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Automatic Power Factor Correction Using Pic Microcontroller PDFDocument61 pagesAutomatic Power Factor Correction Using Pic Microcontroller PDFShashikant MauryaNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
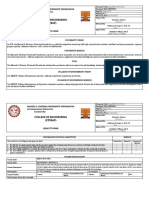
- Eebc 33223 3321l-Syllabus-2019Document11 pagesEebc 33223 3321l-Syllabus-2019Jayven VillamaterNo ratings yet
- ckt3 Ac DC Examples PDFDocument31 pagesckt3 Ac DC Examples PDFSayan ChowdhuryNo ratings yet
- 1) Electrical Department, Sepuluh Nopember of Institute Technology Surabaya, 60111, IndonesiaDocument45 pages1) Electrical Department, Sepuluh Nopember of Institute Technology Surabaya, 60111, IndonesiadimasfupNo ratings yet
- Ac Electrical Circuit LabDocument71 pagesAc Electrical Circuit LabtahiaNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Complex SignalsDocument17 pagesComplex Signalskiran kumar gNo ratings yet
- Mathematics of The Discrete Fourier Transform (DFT) With Audio ApplicationsDocument5 pagesMathematics of The Discrete Fourier Transform (DFT) With Audio ApplicationsA. VillaNo ratings yet
- Lesson 1 - Et332bDocument20 pagesLesson 1 - Et332bkrishnareddy_chintalaNo ratings yet
- ECE Sem 2 SyllabusDocument11 pagesECE Sem 2 SyllabusDaksh SharmaNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Power Quality Aspect of Solar Power: JWG C4/C6.29Document9 pagesPower Quality Aspect of Solar Power: JWG C4/C6.29PabloCokyNo ratings yet
- Line Differential Protection Scheme Modelling (PDF Library)Document6 pagesLine Differential Protection Scheme Modelling (PDF Library)Nirmal RajaNo ratings yet
- GEH-6359 Power Syst StabDocument31 pagesGEH-6359 Power Syst StabSaurabh S. VermaNo ratings yet
- Week 7-Transformers Voltage Regulation and Per Unit calculations-ELEC2300Document30 pagesWeek 7-Transformers Voltage Regulation and Per Unit calculations-ELEC2300Look AxxNo ratings yet
- CH3 Design Considerations of Primary Systems Mars 2020Document67 pagesCH3 Design Considerations of Primary Systems Mars 2020isra marabahNo ratings yet
- UGRD-EE6202 Electric Circuits Theory 2: Home UGRD-EE6202-2033T Week 14: Final Examination Final ExamDocument18 pagesUGRD-EE6202 Electric Circuits Theory 2: Home UGRD-EE6202-2033T Week 14: Final Examination Final ExamJitlee PapaNo ratings yet
- Session Code Subject::2l20lln0nDocument8 pagesSession Code Subject::2l20lln0nFareez AshfariNo ratings yet
- 1P2 Circuit Analysis II Notes MooreDocument162 pages1P2 Circuit Analysis II Notes MooreskateBNo ratings yet
- Network Theory-Electrical and Electronics Engineering-The Fourier SeriesDocument16 pagesNetwork Theory-Electrical and Electronics Engineering-The Fourier SeriesMompati Letsweletse100% (1)
- Electrical Units of MeasureDocument3 pagesElectrical Units of MeasureRaj PatelNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Cse I Basic Electrical Engg. (10ele 15) NotesDocument200 pagesCse I Basic Electrical Engg. (10ele 15) NotesBala SubramanyamNo ratings yet
- Activity5 Group1Document24 pagesActivity5 Group1NicoNo ratings yet
- Alternating Voltages and CurrentsDocument15 pagesAlternating Voltages and CurrentsDavid AmarteyNo ratings yet
- # 0 - Silabus EL2001Document12 pages# 0 - Silabus EL2001Fajri SNo ratings yet
- Transformer DifferentialDocument40 pagesTransformer Differentialshahrizal7100% (1)
- Physical OpticsDocument50 pagesPhysical OpticsMuhammed AbdulmalikNo ratings yet
- SYLLABUSDocument313 pagesSYLLABUSNeethu GopanNo ratings yet
- 01a PROT401 PowerSystemBasics r4Document76 pages01a PROT401 PowerSystemBasics r4Edna Dayana Guerrero ArevaloNo ratings yet
- Faculty of Electrical Engineering Universiti Teknologi MaraDocument5 pagesFaculty of Electrical Engineering Universiti Teknologi Maraaqil aimanNo ratings yet
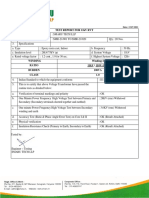
- RVT Test ReportDocument5 pagesRVT Test ReportAK YadavNo ratings yet
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)