You might also like
- Resumen Ingenieria de ControlDocument5 pagesResumen Ingenieria de ControlIsaudRodriguezNo ratings yet
- PippoDocument40 pagesPippostephenNo ratings yet
- A Brief History of Feedback ControlDocument20 pagesA Brief History of Feedback ControlJuan CastilloNo ratings yet
- 2 ArticuloDeInvestigación1-1Document6 pages2 ArticuloDeInvestigación1-1Jorge Luis Rodríguez GonzálezNo ratings yet
- Overview and History of Feedback ControlDocument4 pagesOverview and History of Feedback ControlJeremiah MalagueñoNo ratings yet
- 1 - Introduction To Control Chapter OneDocument13 pages1 - Introduction To Control Chapter Onesythepaul24No ratings yet
- Control EngineeringDocument5 pagesControl EngineeringAliceAlormenuNo ratings yet
- 0 - Actions On Structures Wind Loads - CIB ReportDocument100 pages0 - Actions On Structures Wind Loads - CIB ReportWilliam PolNo ratings yet
- Twentieth Century Developments On Control SystemsDocument6 pagesTwentieth Century Developments On Control SystemsIncohatusFormlessNo ratings yet
- A Brief History of Feedback ControlDocument19 pagesA Brief History of Feedback ControljefersonNo ratings yet
- New Trends in Fluid Mechanics Executive SummaryDocument11 pagesNew Trends in Fluid Mechanics Executive Summaryanon365842No ratings yet
- History of Automatic Control in 40 CharactersDocument5 pagesHistory of Automatic Control in 40 CharacterscparroraNo ratings yet
- Ch1 Introduction To Control SystemsDocument10 pagesCh1 Introduction To Control SystemsNasiha MokhtaruddinNo ratings yet
- Introduction To Control SystemDocument33 pagesIntroduction To Control Systemmarina890416No ratings yet
- Complex Numbers in Modern ApplicationsDocument15 pagesComplex Numbers in Modern ApplicationsMajid MehmoodNo ratings yet
- Entrooy Generation MinimizationDocument29 pagesEntrooy Generation MinimizationjaziyuvNo ratings yet
- Flutter of Subsonic WingDocument11 pagesFlutter of Subsonic WingmamalilariNo ratings yet
- A Brief History of Feedback Control Lewis PDFDocument19 pagesA Brief History of Feedback Control Lewis PDFAnonymous VfH06fQXbANo ratings yet
- Aerodynamic Performance of Wind Turbine Airfoil DUDocument17 pagesAerodynamic Performance of Wind Turbine Airfoil DUSara RodriguezNo ratings yet
- Respect The Unstable PDFDocument14 pagesRespect The Unstable PDFMarcelo Quispe CcachucoNo ratings yet
- Historia Lazo Cerrado - InglesDocument2 pagesHistoria Lazo Cerrado - InglesEdgar Israel López AuquillaNo ratings yet
- GC University Fluid Flow ProcessesDocument8 pagesGC University Fluid Flow Processes4501-Abdullah MasoodNo ratings yet
- Chapter 2Document20 pagesChapter 2yaaawNo ratings yet
- Control of A Decelerating Boundary Layer. Part 1: Optimization of Passive Vortex GeneratorsDocument11 pagesControl of A Decelerating Boundary Layer. Part 1: Optimization of Passive Vortex GeneratorsFauzi Hussin LeoNo ratings yet
- PDFDocument140 pagesPDFGherghe Bogdan0% (1)
- Control Systems TimelineDocument5 pagesControl Systems TimelinenikkiNo ratings yet
- Applicationsoffm 1Document28 pagesApplicationsoffm 1Ahmed SalehNo ratings yet
- Subject Report Aeroelasticity: Aeroelasticity Simulation Uav Atlantiksolar 'S WingDocument29 pagesSubject Report Aeroelasticity: Aeroelasticity Simulation Uav Atlantiksolar 'S WingTrần HiếuNo ratings yet
- Aerodynamic and Aerothermodynamic Analysis of Space Mission Vehicles (Viviani-Pezzella) PDFDocument918 pagesAerodynamic and Aerothermodynamic Analysis of Space Mission Vehicles (Viviani-Pezzella) PDFJesusDavidDeantonioPelaezNo ratings yet
- Review of Literature and Patents on Aerodynamic Effects of LEP WingsDocument40 pagesReview of Literature and Patents on Aerodynamic Effects of LEP WingsHari NaniNo ratings yet
- DSRSSTMKNDL 2Document27 pagesDSRSSTMKNDL 2Yesi Indri HeryaniNo ratings yet
- 1.1 A BRIEF HIS-WPS OfficeDocument10 pages1.1 A BRIEF HIS-WPS OfficeLiezel Pura EugerioNo ratings yet
- Additional Notes2Document83 pagesAdditional Notes2syahrulhishamNo ratings yet
- Prediction and Experimental Validation of Buffeting PhenomenaDocument2 pagesPrediction and Experimental Validation of Buffeting Phenomenasumon1314No ratings yet
- A Brief History of Feedback Control - LewisDocument19 pagesA Brief History of Feedback Control - LewisLuis ZambranoNo ratings yet
- Fluid Flows and Control - AskTheExpertsDocument6 pagesFluid Flows and Control - AskTheExpertsVictor Christian Paredes CaunaNo ratings yet
- Wind Action According To The Brazilian Code: A Case Study: 1 A.M.Wahrhaftig, 2 R.M.L.R.F. BrasilDocument12 pagesWind Action According To The Brazilian Code: A Case Study: 1 A.M.Wahrhaftig, 2 R.M.L.R.F. BrasilRANGAMALLIGA6941No ratings yet
- Investigation of The Heave Dynamics of Air Cushion Vehicles (ACV) : Parametric and Chaotic StudiesDocument21 pagesInvestigation of The Heave Dynamics of Air Cushion Vehicles (ACV) : Parametric and Chaotic Studiesbb06412000No ratings yet
- Process ControlDocument2 pagesProcess ControlKishore RamNo ratings yet
- Hydraulic Circuits: HelalyDocument52 pagesHydraulic Circuits: HelalySurendra SenanayakeNo ratings yet
- Wind Tunnel Testing HistoryDocument19 pagesWind Tunnel Testing HistoryJack WillettNo ratings yet
- Power HydraulicsDocument2 pagesPower HydraulicsĐiệp NgọcNo ratings yet
- History of ACEDocument2 pagesHistory of ACEm1nitk 19No ratings yet
- P 004059Document24 pagesP 004059Manmatha KrishnanNo ratings yet
- Glatt International Times NoDocument10 pagesGlatt International Times NoAhmed Osama ShalashNo ratings yet
- Introduction to Control SystemsDocument23 pagesIntroduction to Control SystemsJagan JagaNo ratings yet
- 1 Introduction To PneumaticDocument25 pages1 Introduction To PneumaticHuzai AzmanNo ratings yet
- 417-Final Thesis Ater Plg. Check-1Document44 pages417-Final Thesis Ater Plg. Check-1balaji.sasane99No ratings yet
- Murman Cole (Extract)Document24 pagesMurman Cole (Extract)Manikanth ValavojuNo ratings yet
- Newtb 141Document7 pagesNewtb 141proxywarNo ratings yet
- A Brief History of Automatic Control: Stuart BennettDocument9 pagesA Brief History of Automatic Control: Stuart BennettMUhammad HafidhNo ratings yet
- Modeling of Aerodynamic Flutter On A NACA 4412 Airfoil Wind Blade (Final)Document7 pagesModeling of Aerodynamic Flutter On A NACA 4412 Airfoil Wind Blade (Final)Alfa BetaNo ratings yet
- Static Longitudinal StabilityDocument32 pagesStatic Longitudinal StabilityBhura SinghNo ratings yet
- Oscillating Water Column 2Document17 pagesOscillating Water Column 2rizwan54549No ratings yet
- Earthquake Response of Imperial County Services BuildingDocument27 pagesEarthquake Response of Imperial County Services Buildingrock_musicNo ratings yet
- AirflowControlbynonThermalPlasmaActuators0022 3727-40-3 S01Document33 pagesAirflowControlbynonThermalPlasmaActuators0022 3727-40-3 S01شاكر العاقلNo ratings yet
- Aeronautical Eng I 00 Klem RichDocument148 pagesAeronautical Eng I 00 Klem RichviorelcroitoruNo ratings yet
- Energetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationFrom EverandEnergetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- Chapter 12 - ThermodynamicsDocument69 pagesChapter 12 - Thermodynamicszahid_polyNo ratings yet
- Control Systems NotesDocument133 pagesControl Systems Noteseee limatNo ratings yet
- Adaptive Control of Uncertain Gear Transmission Servo Systems With Deadzone NonlinearityDocument9 pagesAdaptive Control of Uncertain Gear Transmission Servo Systems With Deadzone Nonlinearitysaleh1978No ratings yet
- BA SyllabusDocument4 pagesBA SyllabusHanNo ratings yet
- Tetrahedron Manufacturing Service Corporate DeckDocument54 pagesTetrahedron Manufacturing Service Corporate DecktetrahedronNo ratings yet
- Quality Management EbookDocument44 pagesQuality Management EbookAnand80% (5)
- IEC 62304 Software Lifecycle Processes SummaryDocument8 pagesIEC 62304 Software Lifecycle Processes SummaryJeffery Wunady0% (1)
- 20 - Pressman-Ch-1314-Software-TestingDocument39 pages20 - Pressman-Ch-1314-Software-Testingapi-237335979No ratings yet
- Plant Development Improvement SystemDocument7 pagesPlant Development Improvement Systemsamsudinnor winataNo ratings yet
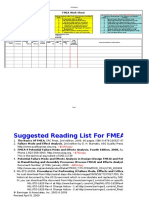
- FMEADocument3 pagesFMEAyadiNo ratings yet
- GenderAgeDetectionDocument9 pagesGenderAgeDetectionVarun KumarNo ratings yet
- OOAD Using UML ExplainedDocument26 pagesOOAD Using UML ExplainedHiren BhingaradiyaNo ratings yet
- Manage and control devicesDocument6 pagesManage and control devicesSRI NANDANNo ratings yet
- Solucion A Algunos Ejercicios Capitulo 7Document14 pagesSolucion A Algunos Ejercicios Capitulo 7Giancarlo Blandino AbreuNo ratings yet
- II B.Tech II Semester Regular Examinations, Apr/May 2007 Chemical Engineering Thermodynamics-IDocument7 pagesII B.Tech II Semester Regular Examinations, Apr/May 2007 Chemical Engineering Thermodynamics-IrajaraghuramvarmaNo ratings yet
- Assiut University Automatic Control Final Exam QuestionsDocument3 pagesAssiut University Automatic Control Final Exam QuestionsEngAbdallahMohamedNo ratings yet
- Introduction To Pid Controllers Ed2Document16 pagesIntroduction To Pid Controllers Ed2Christian BernabeNo ratings yet
- Thermodynamic properties calculation using Peng-Robinson EOSDocument3 pagesThermodynamic properties calculation using Peng-Robinson EOSpaullinhhaNo ratings yet
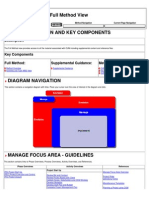
- OUM 6.2 Full Method ViewDocument1,831 pagesOUM 6.2 Full Method Viewsieger7473% (11)
- Lamb - Particle Swarm Optimization (PSO)Document11 pagesLamb - Particle Swarm Optimization (PSO)Mahmoud Abd El HadiNo ratings yet
- Practice Problems: Chapter 17, Maintenance and Reliability: Problem 1Document4 pagesPractice Problems: Chapter 17, Maintenance and Reliability: Problem 1Normalyn Andres MacaysaNo ratings yet
- ME 267: Advanced Thermodynamics I: Thermodynamic RelationsDocument73 pagesME 267: Advanced Thermodynamics I: Thermodynamic Relationsluzviminda ramosNo ratings yet
- Physical Chemistry I (100 Items)Document14 pagesPhysical Chemistry I (100 Items)Mark Ryan Tripole67% (3)
- Chapter 6: Entropy and The Laws of ThermodynamicsDocument12 pagesChapter 6: Entropy and The Laws of Thermodynamicshsa89No ratings yet
- SDLCDocument9 pagesSDLCbisyrul hafiNo ratings yet
- TQM in Service SectorDocument21 pagesTQM in Service SectorPushkar MathureNo ratings yet
- Conceptual Model of Food and Nutritional System PDFDocument11 pagesConceptual Model of Food and Nutritional System PDFdanaNo ratings yet
- AEAS 207 Lec 1Document44 pagesAEAS 207 Lec 1Samin Yaser AhmedNo ratings yet
- Algorithmic Construction of Lyapunov FunctionsDocument14 pagesAlgorithmic Construction of Lyapunov Functionstennis1949No ratings yet