You might also like
- Reiki AngelicoDocument13 pagesReiki Angelicotitoj2012100% (4)
- Trabajo Lazo CerradoDocument16 pagesTrabajo Lazo CerradochicotonyxdNo ratings yet
- Colocacion de Electrodos para TensDocument20 pagesColocacion de Electrodos para Tensmirianys montañez100% (1)
- Tesina. Diplomado en AcupunturaDocument45 pagesTesina. Diplomado en AcupunturaMartita Silva100% (1)
- Practica 6 TEORIA DE CONTROLDocument11 pagesPractica 6 TEORIA DE CONTROLMiguel GuerreroNo ratings yet
- Convertidor Ac AcDocument13 pagesConvertidor Ac AcPedro Beltran100% (1)
- Practica 7 PDF Laboratorio de Teoria de Control y Robotica UnamDocument12 pagesPractica 7 PDF Laboratorio de Teoria de Control y Robotica UnamMiguel GuerreroNo ratings yet
- Evaluacion 3 Proceso IndustrialesDocument6 pagesEvaluacion 3 Proceso IndustrialesJimmy Fabian Orellana VallejosNo ratings yet
- ControladoresDocument15 pagesControladoresAntony TorrezNo ratings yet
- Control Electrónico en Aire AcondicionadoDocument16 pagesControl Electrónico en Aire Acondicionadolmelendezi100% (1)
- Ballet RusoDocument2 pagesBallet RusoVarinia Lourdes Barrantes SeguraNo ratings yet
- VM ENAM 19 - Villapepas 10Document4 pagesVM ENAM 19 - Villapepas 10AlexeiNo ratings yet
- Reporte 7 TCyRDocument6 pagesReporte 7 TCyRJan GarcíaNo ratings yet
- El Perfil Del Psicologo EmergencistaDocument9 pagesEl Perfil Del Psicologo Emergencistacxrf091No ratings yet
- Control Por Contactos DARIEMSDocument58 pagesControl Por Contactos DARIEMSAbraham MartinezNo ratings yet
- Que Es Un TransmisorDocument9 pagesQue Es Un TransmisorromerNo ratings yet
- Ensayo L1Document4 pagesEnsayo L1Adrian Millan MartinezNo ratings yet
- Control y AutomatizacionDocument32 pagesControl y AutomatizacionEmilio Daniel Villalba LozanoNo ratings yet
- Lazo Abierto y CerradoDocument12 pagesLazo Abierto y CerradoMiguel BurgosNo ratings yet
- Percy Mamani Soncco Control1Document13 pagesPercy Mamani Soncco Control1Anonymous MMLzZjbyNo ratings yet
- Conversor A-D de Doble Rampa de 8 Bit'sDocument9 pagesConversor A-D de Doble Rampa de 8 Bit'siona chou100% (1)
- Informe 5 Sistemas de ControlDocument15 pagesInforme 5 Sistemas de ControlPablo Sandoval UrionaNo ratings yet
- ADC Doble RampaDocument5 pagesADC Doble Rampagagafefawefaef100% (1)
- 15 - Instrumentos de Medición Digitales Parte 1Document20 pages15 - Instrumentos de Medición Digitales Parte 1Susana Prado IratchetNo ratings yet
- Seminario Accionamiento Eléctrico Parte 3Document43 pagesSeminario Accionamiento Eléctrico Parte 3Anonymous bDl76usdvaNo ratings yet
- Actividad 1 Tecnología Electrónica Santiago ZavalaDocument4 pagesActividad 1 Tecnología Electrónica Santiago ZavalaSantiago ZavalaNo ratings yet
- Práctica 11Document6 pagesPráctica 11Karencita VanessaNo ratings yet
- Practica 3 de Instrumentación y ControlDocument9 pagesPractica 3 de Instrumentación y ControlAle AlvarezNo ratings yet
- Funcionamiento de Un AutomataDocument4 pagesFuncionamiento de Un AutomataMartin GonzalesNo ratings yet
- INFORMEDocument20 pagesINFORMEJosé Ignacio Mendieta CamargoNo ratings yet
- 9 Fase 3 - Diseñar La Etapa de Potencia y FiltradoDocument16 pages9 Fase 3 - Diseñar La Etapa de Potencia y FiltradoSolMilenaMejíaNo ratings yet
- Control Electrónico Aire Acondicionado Mini SplitDocument14 pagesControl Electrónico Aire Acondicionado Mini SplittalentoNo ratings yet
- PLC Tratamiento Señales AnalogasDocument12 pagesPLC Tratamiento Señales AnalogasJohan Andres Rodriguez CortesNo ratings yet
- El Control Digital en La IndustriaDocument8 pagesEl Control Digital en La IndustriaJuan GalvesNo ratings yet
- SERVOMOTORDocument7 pagesSERVOMOTORRogelio MtzNo ratings yet
- Transmisor NeumaticoDocument7 pagesTransmisor NeumaticoAndres De Jesus LozanoNo ratings yet
- Reporte Final Control DigitalDocument23 pagesReporte Final Control DigitalHéctor Omar SanchezNo ratings yet
- Semana 3Document21 pagesSemana 3adriana4camacNo ratings yet
- Fase3 Hernan AlapeDocument13 pagesFase3 Hernan AlapeJavier E. PinzónNo ratings yet
- Guia de Práctica N°3 Módulo de CaudalDocument27 pagesGuia de Práctica N°3 Módulo de Caudaljerson saucedo delgadoNo ratings yet
- T5C3 CtosDisparoD 183143 PDFDocument10 pagesT5C3 CtosDisparoD 183143 PDFAlejandra PalaciosNo ratings yet
- Instituto Politécnico NacionalDocument8 pagesInstituto Politécnico NacionalFrancisco AC100% (1)
- Control de Procesos - 2da. ParteDocument54 pagesControl de Procesos - 2da. ParteJarry RNBNo ratings yet
- Investigacion 10%Document17 pagesInvestigacion 10%Jose Gabriel Torrealba OropezaNo ratings yet
- Practicas de AutomatizacionDocument34 pagesPracticas de AutomatizacionMartin TreviñoNo ratings yet
- Control Automatico HornoDocument31 pagesControl Automatico HornoRudy Glausser100% (1)
- Transmisor TransductorDocument4 pagesTransmisor TransductorSamantaAmadorNo ratings yet
- Pi2 Hotec CPDocument18 pagesPi2 Hotec CProbertarceNo ratings yet
- Práctica2 TransmisoresDocument6 pagesPráctica2 TransmisoresricardoNo ratings yet
- ControladoresDocument8 pagesControladoresAna Silvia Avalos IbarraNo ratings yet
- 7,8,9 y 10 Informes ElkaDocument8 pages7,8,9 y 10 Informes ElkaMireya LainezNo ratings yet
- Tipos de TransmisoresDocument4 pagesTipos de Transmisorescameron1119880% (1)
- Materia de ApoyoDocument39 pagesMateria de ApoyoEstudiantilNo ratings yet
- Tarea 06 TransmisoresDocument5 pagesTarea 06 TransmisoresLeo AlcantaraNo ratings yet
- Trabajo 2 - Ingenieria - de - Control - Rzuñagua PDFDocument20 pagesTrabajo 2 - Ingenieria - de - Control - Rzuñagua PDFRoger Zuñagua SunturaNo ratings yet
- 2ControlP PosicionDocument25 pages2ControlP PosicionnegroNo ratings yet
- Electronic Trip Circuit Breaker BasicsDocument9 pagesElectronic Trip Circuit Breaker BasicsMaximo Gomez GuerreroNo ratings yet
- Practica TransmisoresDocument10 pagesPractica TransmisoresJulio Cesar ParedesNo ratings yet
- Grupo 203039 - 10 - FASE - 5Document33 pagesGrupo 203039 - 10 - FASE - 5pcortizs30% (1)
- Proyecto de Ingenieria InversaDocument15 pagesProyecto de Ingenieria InversaYuberki S. PuelloNo ratings yet
- Sensores y Actuadores 1 PDFDocument21 pagesSensores y Actuadores 1 PDFRoberto HermenegildoNo ratings yet
- Control Digital Basado en DSP para Un Motor de InducciónDocument6 pagesControl Digital Basado en DSP para Un Motor de InducciónJorMa HMNo ratings yet
- Soluciones Unidad 1Document14 pagesSoluciones Unidad 1Saúl Cabo BlancoNo ratings yet
- Informe 2 - FisiopatologíaDocument5 pagesInforme 2 - FisiopatologíaKiara SenmacheNo ratings yet
- Qué Alimentos Fortalecen Los Tendones y MúsculosDocument16 pagesQué Alimentos Fortalecen Los Tendones y MúsculostatiteteNo ratings yet
- Mate CircunferenciaDocument8 pagesMate CircunferenciaAnonymous 3CS2gZNo ratings yet
- Manual Pastores Parte2Document96 pagesManual Pastores Parte2Marcelo Reyes CerdaNo ratings yet
- Evaluación Formativa Módulo 3Document11 pagesEvaluación Formativa Módulo 3Cristóbal Cabrera MuñozNo ratings yet
- Manual de Bienvenida Padres de Familia 2023-2024Document12 pagesManual de Bienvenida Padres de Familia 2023-2024luis.torresNo ratings yet
- Capitulo 3 - VA UnidimensionalesDocument95 pagesCapitulo 3 - VA UnidimensionalesLaura Ximena Guerrero TrujilloNo ratings yet
- CronobiologíaDocument2 pagesCronobiologíaRoger LauNo ratings yet
- DEFINITIVO - CLASE 6 PronosticoDocument31 pagesDEFINITIVO - CLASE 6 PronosticoLain BristllNo ratings yet
- GUIA 2 Ejercicios PracticosDocument8 pagesGUIA 2 Ejercicios PracticosMaria JoseNo ratings yet
- De La Lengua y Otros MalesDocument3 pagesDe La Lengua y Otros MalesPatricio TapiaNo ratings yet
- Metodos de Adquisicion de ConocimientoDocument18 pagesMetodos de Adquisicion de ConocimientoAndres Chavez100% (1)
- Tesdoc A2015 Palomo Ana MaternidadDocument395 pagesTesdoc A2015 Palomo Ana MaternidadElisabet Merino AldaiNo ratings yet
- PDFDocument10 pagesPDFSANTIAGO TORRESNo ratings yet
- Clases AbstractasDocument8 pagesClases AbstractasFran MayNo ratings yet
- Gaitan 2006 El Bienestar Social de La InfanciaDocument18 pagesGaitan 2006 El Bienestar Social de La InfanciaMichelle CisternasNo ratings yet
- 3 La Ética Como Ordenación de La ConductaDocument7 pages3 La Ética Como Ordenación de La ConductayaninaNo ratings yet
- Adorno. La Negociación Del Miedo en Los NaufragiosDocument22 pagesAdorno. La Negociación Del Miedo en Los NaufragiosMicaela MolinaNo ratings yet
- Geografia - 1er Año - I Bimestre - 2014Document22 pagesGeografia - 1er Año - I Bimestre - 2014Franz VillarruelNo ratings yet
- Presentación Principios Generales Del DerechoDocument19 pagesPresentación Principios Generales Del DerechoAnay Mena JuarezNo ratings yet
- Recolección de Datos Cuantitativos 1Document4 pagesRecolección de Datos Cuantitativos 1Elian torresNo ratings yet
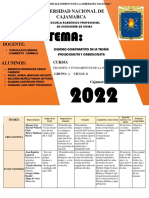
- Cuadro Comparativo Teoría Evolucionista y CreacionistaDocument2 pagesCuadro Comparativo Teoría Evolucionista y CreacionistaCésar MendozaNo ratings yet
- Proyección de CráneoDocument6 pagesProyección de Cráneofiel_en_cristo67% (6)
- Clase Desigualdades e InecuacionesDocument17 pagesClase Desigualdades e Inecuacionesmyriamruby50% (2)