You might also like
- A Precise Control of AC Servo Motor Using Neural Network PID ControllerDocument7 pagesA Precise Control of AC Servo Motor Using Neural Network PID ControllerShantanu PatilNo ratings yet
- N EOM Project Report: Fuzzy-Pid ControllerDocument35 pagesN EOM Project Report: Fuzzy-Pid ControllerAnime XNo ratings yet
- A0408 05-0112 PDFDocument12 pagesA0408 05-0112 PDFIJMERNo ratings yet
- 08 July 2013Document5 pages08 July 2013IJBSTRNo ratings yet
- Comparative Analysis of Field Oriented Control of BLDC Motor Using SPWM and SVPWM TechniquesDocument6 pagesComparative Analysis of Field Oriented Control of BLDC Motor Using SPWM and SVPWM TechniquesTony starkNo ratings yet
- Development of A BLDC Motor Drive With Improved Output CharacteristicsDocument4 pagesDevelopment of A BLDC Motor Drive With Improved Output CharacteristicskurlshNo ratings yet
- Simulation & Controlling of Brushless DC Motor Using PI/Fuzzy HybridDocument4 pagesSimulation & Controlling of Brushless DC Motor Using PI/Fuzzy Hybridsunil kumarNo ratings yet
- Ijert Ijert: Control of Three Phase BLDC Motor Using Fuzzy Logic ControllerDocument5 pagesIjert Ijert: Control of Three Phase BLDC Motor Using Fuzzy Logic ControllergbksnNo ratings yet
- Accurate Modelling of DC Brushless Motor Drive for IndustryDocument4 pagesAccurate Modelling of DC Brushless Motor Drive for IndustryleodazitaNo ratings yet
- Performance Study of Enhanced Non LinearDocument10 pagesPerformance Study of Enhanced Non LinearadilNo ratings yet
- 41 Ijmtst0709093Document5 pages41 Ijmtst0709093Thức HoàngNo ratings yet
- Paris, FranceICSTEM (2019)Document6 pagesParis, FranceICSTEM (2019)Dr. D. V. KamathNo ratings yet
- Speed Control of Brushless DC Motor Using Fuzzy Logic ControllerDocument9 pagesSpeed Control of Brushless DC Motor Using Fuzzy Logic ControllerIOSRjournalNo ratings yet
- Modeling and Control of BLDC Motor using PI and FLCDocument66 pagesModeling and Control of BLDC Motor using PI and FLCBalajiKRamNo ratings yet
- Speed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationDocument5 pagesSpeed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationSofyan AhmadiNo ratings yet
- Simulation work on Fractional Order PIλ Control Strategy for speed control of DC motor based on stability boundary locus methodDocument7 pagesSimulation work on Fractional Order PIλ Control Strategy for speed control of DC motor based on stability boundary locus methodseventhsensegroupNo ratings yet
- Comparative Analysis of Speed Control Techniques of DC Motors With MatlabDocument4 pagesComparative Analysis of Speed Control Techniques of DC Motors With Matlabsrinureddy2014No ratings yet
- Simulation Model of ANN and PID Controller For Direct Current Servo Motor by Using Matlab/SimulinkDocument11 pagesSimulation Model of ANN and PID Controller For Direct Current Servo Motor by Using Matlab/SimulinkTELKOMNIKANo ratings yet
- Speed Control of Vsi Based Induction Motor Using AnnDocument38 pagesSpeed Control of Vsi Based Induction Motor Using AnnPAVAN CHAVALINo ratings yet
- Mohd Amir Fikri Awang (CD 5327) PDFDocument24 pagesMohd Amir Fikri Awang (CD 5327) PDFAibruob OmegaNo ratings yet
- Speed Control For Servo DC Motor With Different Tuning PID Controller With LabviewDocument11 pagesSpeed Control For Servo DC Motor With Different Tuning PID Controller With LabviewPratika RoyNo ratings yet
- Sliding Mode Controller For Induction Motor DrivesDocument57 pagesSliding Mode Controller For Induction Motor DrivesSibin G ThomasNo ratings yet
- Model Predictive Control of High Power Converters and Industrial DrivesFrom EverandModel Predictive Control of High Power Converters and Industrial DrivesNo ratings yet
- Self Tuned PID Based Speed Control of PMDC Drive: E.Gowthaman C.Dinesh BalajiDocument7 pagesSelf Tuned PID Based Speed Control of PMDC Drive: E.Gowthaman C.Dinesh BalajiajieNo ratings yet
- Speed control of BLDC Motor using IPM and Micro 2812Document41 pagesSpeed control of BLDC Motor using IPM and Micro 2812subbanna100% (1)
- Optimal PID Controller Parameters For Vector ContrDocument8 pagesOptimal PID Controller Parameters For Vector ContrTony starkNo ratings yet
- 1#a Comparative Study of PI Fuzzy and ANN Controllers For Chopper Fed DC Drive With Embedded Systems ApproachDocument17 pages1#a Comparative Study of PI Fuzzy and ANN Controllers For Chopper Fed DC Drive With Embedded Systems ApproachalialibabaNo ratings yet
- IMC Tuned PID Controller Improves DC Motor ControlDocument6 pagesIMC Tuned PID Controller Improves DC Motor ControljayaseelanNo ratings yet
- Speed and Position Control of DC Motor Using LabVIEW-IJRASETDocument8 pagesSpeed and Position Control of DC Motor Using LabVIEW-IJRASETIJRASETPublicationsNo ratings yet
- Simple and Effective Digital Control of A Variable-Speed Low Inductance BLDC Motor DriveDocument11 pagesSimple and Effective Digital Control of A Variable-Speed Low Inductance BLDC Motor DriveVidhya M PNo ratings yet
- Design of Robust H-Infinity Speed Controller For High Performance BLDC Servo DriveDocument6 pagesDesign of Robust H-Infinity Speed Controller For High Performance BLDC Servo DriveyaheyaNo ratings yet
- Speed Control of DC Motor Using PWM TechniqueDocument76 pagesSpeed Control of DC Motor Using PWM TechniquekishoreNo ratings yet
- Low Cost Fuzzy Logic Based Speed Control of BLDC Motor DrivesDocument6 pagesLow Cost Fuzzy Logic Based Speed Control of BLDC Motor DrivesAlex CastilloNo ratings yet
- Control BLDC Motor Speed Using PID ControllerDocument5 pagesControl BLDC Motor Speed Using PID ControllerAbhay JangirNo ratings yet
- 5sensorlessBLDC PDFDocument7 pages5sensorlessBLDC PDFAlex CastilloNo ratings yet
- Speed Performance of Three Phase Induction Motor by Using Simplified Vector Control MethodDocument7 pagesSpeed Performance of Three Phase Induction Motor by Using Simplified Vector Control MethodNithyashriNo ratings yet
- A Technical Seminar Report On: P.Neeharika (08B21A02B5)Document9 pagesA Technical Seminar Report On: P.Neeharika (08B21A02B5)srinivas0276No ratings yet
- DSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM TechniqueDocument18 pagesDSP-Based Real-Time Implementation of AC-DC-AC Converter Using SPWM Techniquebalamurugan041992No ratings yet
- Development of FPGA Based Smart Controller For Speed Control of BLDC MotorDocument7 pagesDevelopment of FPGA Based Smart Controller For Speed Control of BLDC MotorInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Result PPRDocument5 pagesResult PPRMayuri Chauray-shindeNo ratings yet
- Co-Simulation of BLDC Motor Commutation by Using MDocument7 pagesCo-Simulation of BLDC Motor Commutation by Using Mahurtado017No ratings yet
- Fpga Based BLDC Motor ControlDocument20 pagesFpga Based BLDC Motor ControlPreeti Mishra100% (1)
- Binding PDFDocument29 pagesBinding PDFSraboni RoyNo ratings yet
- Chapter-1: 1.1 Pi ControllerDocument21 pagesChapter-1: 1.1 Pi ControllerRAVINA MANGALNo ratings yet
- Microcontroller Controlled BLDC Drive for Electric VehiclesDocument4 pagesMicrocontroller Controlled BLDC Drive for Electric VehiclesAvinash Babu KmNo ratings yet
- FinalDocument52 pagesFinalMayank SrivastavaNo ratings yet
- Ijert Ijert: Speed Control of DC Motor Using Digital Control SystemDocument3 pagesIjert Ijert: Speed Control of DC Motor Using Digital Control SystemArturo ChaconNo ratings yet
- Speed Control Using Fuzzy Controller For A Four Switch Sensorless BLDC MotorDocument7 pagesSpeed Control Using Fuzzy Controller For A Four Switch Sensorless BLDC MotorInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Implementation of Pid Trained Artificial Neural Network Controller For Different DC Motor DriveDocument14 pagesImplementation of Pid Trained Artificial Neural Network Controller For Different DC Motor DriveGery VerzaztNo ratings yet
- Simulation DC Motor Speed Control System by Using PID ControllerDocument6 pagesSimulation DC Motor Speed Control System by Using PID ControllerEditor IJTSRDNo ratings yet
- Comparative Study Between Pid and Fuzzy Pid Controller For Speed Control of BLDC Motor IJERTV7IS050098Document6 pagesComparative Study Between Pid and Fuzzy Pid Controller For Speed Control of BLDC Motor IJERTV7IS050098DIVYA PRASOONA CNo ratings yet
- Implementation of Pid Trained Artificial Neural Network Controller For Different DC Motor DriveDocument13 pagesImplementation of Pid Trained Artificial Neural Network Controller For Different DC Motor DriveMuruganandam MasilamaniNo ratings yet
- Modelling BLDC Motor Drive Using Sensored and Sensorless ControlDocument10 pagesModelling BLDC Motor Drive Using Sensored and Sensorless ControlvishiwizardNo ratings yet
- PI Ref 1Document6 pagesPI Ref 1Ramya BabuNo ratings yet
- Comparison of DC Motor Speed Control Using Fuzzy Logic and MPCDocument5 pagesComparison of DC Motor Speed Control Using Fuzzy Logic and MPCraghav4life8724No ratings yet
- Ijprse V2i1 2Document6 pagesIjprse V2i1 2Pratika RoyNo ratings yet
- Project Report On Speed Control of DC Motor by Using PWM TechniqueDocument75 pagesProject Report On Speed Control of DC Motor by Using PWM Techniquepandyamech80% (15)
- Digital Power Electronics and ApplicationsFrom EverandDigital Power Electronics and ApplicationsRating: 3.5 out of 5 stars3.5/5 (3)
- AC Electric Motors Control: Advanced Design Techniques and ApplicationsFrom EverandAC Electric Motors Control: Advanced Design Techniques and ApplicationsFouad GiriNo ratings yet
- IJSC Vol2 Iss1 253 260 2 PDFDocument8 pagesIJSC Vol2 Iss1 253 260 2 PDFMd Mustafa KamalNo ratings yet
- Help PDFDocument2 pagesHelp PDFMd Mustafa KamalNo ratings yet
- 2012bukataphd PDFDocument200 pages2012bukataphd PDFMd Mustafa Kamal100% (1)
- Omega PID TunningDocument4 pagesOmega PID TunningOwaisNo ratings yet
- 1Vol4No11 PDFDocument6 pages1Vol4No11 PDFMd Mustafa KamalNo ratings yet
- A PSO-Based Optimum Design of PID Controller For A Linear Brushless DC MotorDocument5 pagesA PSO-Based Optimum Design of PID Controller For A Linear Brushless DC MotorMd Mustafa KamalNo ratings yet
- Lars hagg2012PID PDFDocument6 pagesLars hagg2012PID PDFMd Mustafa KamalNo ratings yet
- Up ReportDocument26 pagesUp ReportMaheshNo ratings yet
- Basic Instrumentation Measuring Devices and Basic Pid ControlDocument125 pagesBasic Instrumentation Measuring Devices and Basic Pid ControlCuong Nguyen ChiNo ratings yet
- TransDocument25 pagesTransMd Mustafa KamalNo ratings yet
- 19Document42 pages19Bhavya SainiNo ratings yet
- GA Speed Regulation of BLDCDocument6 pagesGA Speed Regulation of BLDCdivinelightNo ratings yet
- The Fractional Fourier Transform and Its ApplicationsDocument26 pagesThe Fractional Fourier Transform and Its ApplicationsCarlos Francisco HerreraNo ratings yet
- Xiachangliang 4 PDFDocument8 pagesXiachangliang 4 PDFMd Mustafa KamalNo ratings yet
- OpticalDocument88 pagesOpticalMd Mustafa KamalNo ratings yet
- Session-Animation and GraphicsDocument68 pagesSession-Animation and GraphicsMd Mustafa KamalNo ratings yet
- Best simple PID tuning rulesDocument27 pagesBest simple PID tuning rulesstathiss11No ratings yet
- Microprocessor Controlled Ac and DC DrivesDocument21 pagesMicroprocessor Controlled Ac and DC DrivesMd Mustafa KamalNo ratings yet
- Lecture15 PDFDocument34 pagesLecture15 PDFMd Mustafa KamalNo ratings yet
- Microprocessor Controlled Ac and DC DrivesDocument21 pagesMicroprocessor Controlled Ac and DC DrivesMd Mustafa KamalNo ratings yet
- Linux 2 Weeks Short CourseDocument2 pagesLinux 2 Weeks Short CourseMd Mustafa KamalNo ratings yet
- The Fractional Fourier Transform and Its ApplicationsDocument26 pagesThe Fractional Fourier Transform and Its ApplicationsCarlos Francisco HerreraNo ratings yet
- Digital control of speed using SCRs and ADCDocument6 pagesDigital control of speed using SCRs and ADCMd Mustafa KamalNo ratings yet
- Digital control of speed using SCRs and ADCDocument6 pagesDigital control of speed using SCRs and ADCMd Mustafa KamalNo ratings yet
- BLDC FuzzyDocument6 pagesBLDC FuzzyMd Mustafa KamalNo ratings yet
- 11 03 0293 00 000e CFB DeletionDocument3 pages11 03 0293 00 000e CFB DeletionMd Mustafa KamalNo ratings yet
- Gain and Noise Figure of Erbium-Doped Fiber Amplifier (EDFADocument5 pagesGain and Noise Figure of Erbium-Doped Fiber Amplifier (EDFAMd Mustafa KamalNo ratings yet
- Hydro Power Plant EssentialsDocument41 pagesHydro Power Plant EssentialsMd Mustafa Kamal100% (2)
- Use of EDCA Access During HCF Polling: Mathilde Benveniste, Avaya LabsDocument5 pagesUse of EDCA Access During HCF Polling: Mathilde Benveniste, Avaya LabsMd Mustafa KamalNo ratings yet
- Social marketing and entertainment-education strategyDocument15 pagesSocial marketing and entertainment-education strategyBiji ThottungalNo ratings yet
- Tcs Employment Application Form: Basic DetailsDocument6 pagesTcs Employment Application Form: Basic DetailsRakesh Reddy GeetlaNo ratings yet
- Bangalisan V Ca G.R. No. 124678 July 31, 1997 Regalado, J.: FactsDocument1 pageBangalisan V Ca G.R. No. 124678 July 31, 1997 Regalado, J.: FactsKate GaroNo ratings yet
- Introduction to ShipbuildingDocument7 pagesIntroduction to Shipbuildingmanoj narayananNo ratings yet
- Alignment: Application and Installation GuideDocument28 pagesAlignment: Application and Installation Guideaabaroasr100% (3)
- Election Laws (Nachura, de Leon, Bernas, Valencia) (2022)Document101 pagesElection Laws (Nachura, de Leon, Bernas, Valencia) (2022)Aimee VenterosoNo ratings yet
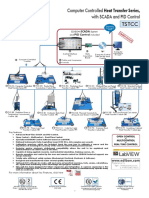
- Computer Controlled Heat Transfer Series SCADA PIDDocument30 pagesComputer Controlled Heat Transfer Series SCADA PIDAli HadiNo ratings yet
- Gemstone MineralsDocument8 pagesGemstone MineralsRina Shane PascuaNo ratings yet
- Quadcopter Project Presentation Using KK 2.1.5 ControllerDocument13 pagesQuadcopter Project Presentation Using KK 2.1.5 ControllerAkshay SinghalNo ratings yet
- CT Procurement 21 - 22 General Conditions of Contract (Standard)Document9 pagesCT Procurement 21 - 22 General Conditions of Contract (Standard)Ben Slimen SlahNo ratings yet
- Design of Experiments - Wikipedia, The Free EncyclopediaDocument12 pagesDesign of Experiments - Wikipedia, The Free EncyclopediaKusuma ZulyantoNo ratings yet
- Saleslist 5Document43 pagesSaleslist 5scribd495No ratings yet
- NSW Building Industry Security of Payment ActDocument31 pagesNSW Building Industry Security of Payment ActJason ShermanNo ratings yet
- 7s ModelDocument18 pages7s ModelUJJAL SAHU100% (2)
- Behringer Europower-P0569 Hca2400 Sps1000 DPX Pmp-1280s 5000 SCHDocument15 pagesBehringer Europower-P0569 Hca2400 Sps1000 DPX Pmp-1280s 5000 SCHNorel Andrei100% (2)
- Muru Crane CV WordDocument6 pagesMuru Crane CV WordMURUGESAN PONNIAHNo ratings yet
- SPE-176481-MS Deep Water Reservoir Characterization and Its Challenges in Field Development Drilling Campaign, Kutei Basin, Indonesia-A Case StudyDocument16 pagesSPE-176481-MS Deep Water Reservoir Characterization and Its Challenges in Field Development Drilling Campaign, Kutei Basin, Indonesia-A Case StudyDian KurniawanNo ratings yet
- DRDO recruitment for scientists in remote areasDocument7 pagesDRDO recruitment for scientists in remote areasselva mechNo ratings yet
- Edu Uc Ddo 05 06 Onwards 7-21Document20 pagesEdu Uc Ddo 05 06 Onwards 7-21biplabsahoo10No ratings yet
- Career Interest Inventory HandoutDocument2 pagesCareer Interest Inventory HandoutfernangogetitNo ratings yet
- ReadmeDocument13 pagesReadmeLalo RuizNo ratings yet
- Philippine Environmental Laws SummaryDocument54 pagesPhilippine Environmental Laws SummaryHayel Rabaja50% (2)
- 6 Non-Executive-Presidents-In-Parliamentary-Democracies-PrimerDocument34 pages6 Non-Executive-Presidents-In-Parliamentary-Democracies-PrimerWorawut Von SarkhanNo ratings yet
- Direct Cuspal Coverage Posterior Resin Composite RestorationsDocument8 pagesDirect Cuspal Coverage Posterior Resin Composite Restorationsdentace1No ratings yet
- Interview Questions For PBDocument3 pagesInterview Questions For PBskrtripathiNo ratings yet
- Uy V ContrerasDocument6 pagesUy V Contrerascha chaNo ratings yet
- Cultural Impacts of Tourism in VietnamDocument4 pagesCultural Impacts of Tourism in VietnamBùi Thanh Ngọc BíchNo ratings yet
- Solutions For Smarter and Smoother People FlowDocument12 pagesSolutions For Smarter and Smoother People FlowMichelle SusantoNo ratings yet
- Physics Project On Dual Axis Solar TrackerDocument10 pagesPhysics Project On Dual Axis Solar TrackerDanish AhamedNo ratings yet
- PLSQL - 5 - 6 - Brayan Ferney Perez Moreno PDFDocument5 pagesPLSQL - 5 - 6 - Brayan Ferney Perez Moreno PDFBryan PerezNo ratings yet