You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Whatiswdmwp - en USDocument1 pageWhatiswdmwp - en UStheimagingsourceNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Whatisdcamwp - en USDocument1 pageWhatisdcamwp - en UStheimagingsourceNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Vfappswp - en USDocument18 pagesVfappswp - en UStheimagingsourceNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Vfman - en USDocument9 pagesVfman - en UStheimagingsourceNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Vfir12led - en USDocument6 pagesVfir12led - en UStheimagingsourceNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Whatisdirectxwp - en USDocument1 pageWhatisdirectxwp - en UStheimagingsourceNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Xcd79spec - en USDocument4 pagesXcd79spec - en UStheimagingsourceNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Tisusbcmoscamsgs - en USDocument1 pageTisusbcmoscamsgs - en UStheimagingsourceNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
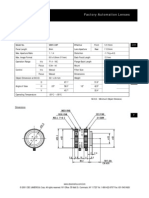
- t2z1816cs - en USDocument1 paget2z1816cs - en UStheimagingsourceNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- T0812fics3.en USDocument1 pageT0812fics3.en UStheimagingsourceNo ratings yet
- Tisfwcamsgs - en USDocument1 pageTisfwcamsgs - en UStheimagingsourceNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- t2z1816cs - en USDocument1 paget2z1816cs - en UStheimagingsourceNo ratings yet
- Tisfwcamsgs - en USDocument1 pageTisfwcamsgs - en UStheimagingsourceNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Mt9t031.en USDocument12 pagesMt9t031.en UStheimagingsourceNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Icx249al - en USDocument20 pagesIcx249al - en UStheimagingsourceNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Mt9v023.en USDocument2 pagesMt9v023.en UStheimagingsourceNo ratings yet
- Mt9m001.en USDocument2 pagesMt9m001.en UStheimagingsourceNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Mt9d131.en USDocument18 pagesMt9d131.en UStheimagingsourceNo ratings yet
- Icx248ak - en USDocument21 pagesIcx248ak - en UStheimagingsourceNo ratings yet
- Mt9m131.en USDocument14 pagesMt9m131.en UStheimagingsourceNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- M6z1212.en USDocument1 pageM6z1212.en UStheimagingsourceNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Icx248ak - en USDocument21 pagesIcx248ak - en UStheimagingsourceNo ratings yet
- m0814mp - en USDocument1 pagem0814mp - en UStheimagingsourceNo ratings yet
- Icx248al - en USDocument20 pagesIcx248al - en UStheimagingsourceNo ratings yet
- Icx084ak - en USDocument18 pagesIcx084ak - en UStheimagingsourceNo ratings yet
- Icx059ck - en USDocument19 pagesIcx059ck - en UStheimagingsourceNo ratings yet
- Icx099al - en USDocument21 pagesIcx099al - en UStheimagingsourceNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Icx209ak - en USDocument18 pagesIcx209ak - en UStheimagingsourceNo ratings yet
- Icx058cl - en USDocument18 pagesIcx058cl - en UStheimagingsourceNo ratings yet
- Icx058cl - en USDocument18 pagesIcx058cl - en UStheimagingsourceNo ratings yet
- 10 StereoDocument131 pages10 StereoUdaranga WickramasingheNo ratings yet
- Stereo Vision-Estimation of Disparity: Advanced Computer Vision Course MEC - 301/2Document29 pagesStereo Vision-Estimation of Disparity: Advanced Computer Vision Course MEC - 301/2Rekha JayaprakashNo ratings yet
- Programming Assignment 3 3D Reconstruction: InstructionsDocument15 pagesProgramming Assignment 3 3D Reconstruction: InstructionsHilbert JeffNo ratings yet
- Photo Plan ManualDocument327 pagesPhoto Plan ManualTareas Hacemos Sus TareasNo ratings yet
- Single-View Geometry of A Rectangle With Application To Whiteboard Image RectificationDocument7 pagesSingle-View Geometry of A Rectangle With Application To Whiteboard Image RectificationRazvan PistoleaNo ratings yet
- Epipolar GeometryDocument14 pagesEpipolar GeometryphysicsnewblolNo ratings yet
- Automatic Rectification of Perspective Distortion From A Single Image Using Plane Homography PDFDocument12 pagesAutomatic Rectification of Perspective Distortion From A Single Image Using Plane Homography PDFAnonymous lVQ83F8mCNo ratings yet
- ENVI Tutorial: Orthorectifying Aerial PhotographsDocument12 pagesENVI Tutorial: Orthorectifying Aerial PhotographsPartha GhoshNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Computer Vision Projective Geometry and Calibration: Professor HagerDocument67 pagesComputer Vision Projective Geometry and Calibration: Professor Hagersab108No ratings yet
- Computer Vision System ToolboxDocument10 pagesComputer Vision System ToolboxClaudia Angélica Rivera RomeroNo ratings yet
- GSE 189 Lab 4Document15 pagesGSE 189 Lab 4Jasper MollenoNo ratings yet
- Photogrammetric Applications For Cultural HeritageDocument128 pagesPhotogrammetric Applications For Cultural HeritageKathy JancesNo ratings yet
- Lab 1Document14 pagesLab 1HudaNo ratings yet
- Epipolar Geometry 2Document50 pagesEpipolar Geometry 2David LichaaNo ratings yet
- The Technology of Image Processing Used in Automatic Target-Scoring SystemDocument4 pagesThe Technology of Image Processing Used in Automatic Target-Scoring SystemDedy LoebisNo ratings yet
- Cylindrical Rectification PDFDocument7 pagesCylindrical Rectification PDFShi LiliNo ratings yet
- Stereo Vision Applying Opencv and Raspberry Pi: Commission IIDocument5 pagesStereo Vision Applying Opencv and Raspberry Pi: Commission IISouvik DattaNo ratings yet
- A Stereo Perception Framework For Autonomous VehiclesDocument6 pagesA Stereo Perception Framework For Autonomous Vehicles4728Vishakha KambleNo ratings yet
- 15 April 2020 - Session1 - Digital Image Enhancement - Mrs Minikashi KumarDocument40 pages15 April 2020 - Session1 - Digital Image Enhancement - Mrs Minikashi KumarAnita Sofia KeyserNo ratings yet
- Computer Vision Toolbox (Matlab)Document10 pagesComputer Vision Toolbox (Matlab)Hotland SitorusNo ratings yet
- Stereovision Based Hand Gesture RecognitionDocument30 pagesStereovision Based Hand Gesture RecognitionVikram Shenoy HandiruNo ratings yet
- Azure DevOps Engineer: Exam AZ-400: Azure DevOps Engineer: Exam AZ-400 Designing and Implementing Microsoft DevOps SolutionsFrom EverandAzure DevOps Engineer: Exam AZ-400: Azure DevOps Engineer: Exam AZ-400 Designing and Implementing Microsoft DevOps SolutionsNo ratings yet
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]From EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Rating: 5 out of 5 stars5/5 (2)
- RHCSA Red Hat Enterprise Linux 9: Training and Exam Preparation Guide (EX200), Third EditionFrom EverandRHCSA Red Hat Enterprise Linux 9: Training and Exam Preparation Guide (EX200), Third EditionNo ratings yet