You might also like
- Proc SPIE - Optra PaperDocument9 pagesProc SPIE - Optra PapernorbdudeNo ratings yet
- Beat The Micros in 2012Document43 pagesBeat The Micros in 2012norbdudeNo ratings yet
- SPIE 6422-32 Risley Prisms ToralesDocument8 pagesSPIE 6422-32 Risley Prisms ToralesnorbdudeNo ratings yet
- Proc SPIE - 6304Document10 pagesProc SPIE - 6304norbdudeNo ratings yet
- 7 Deadly Sins of Style Edition 2 PDFDocument47 pages7 Deadly Sins of Style Edition 2 PDFBagus ZakiNo ratings yet
- 2009 AO ND Filters With Risley PrismsDocument8 pages2009 AO ND Filters With Risley PrismsnorbdudeNo ratings yet
- 2010 - AO - 3D Scan - Telecentric Scanner and Double WedgesDocument21 pages2010 - AO - 3D Scan - Telecentric Scanner and Double WedgesnorbdudeNo ratings yet
- 2011 AO Li Y Risley Prisms Thick XXDocument8 pages2011 AO Li Y Risley Prisms Thick XXnorbdudeNo ratings yet
- 2011 AO Li Y Risley Prisms Thick XXDocument8 pages2011 AO Li Y Risley Prisms Thick XXnorbdudeNo ratings yet
- 2008 OPEX Microprisms ArrayDocument11 pages2008 OPEX Microprisms ArraynorbdudeNo ratings yet
- 2009 Jbo Rat With SsoctDocument3 pages2009 Jbo Rat With SsoctnorbdudeNo ratings yet
- 2006 OPEX Miyazaki - Volumetric Display - 3D ScanningDocument10 pages2006 OPEX Miyazaki - Volumetric Display - 3D ScanningnorbdudeNo ratings yet
- 2008 Appl Opt - Prism Interferometer - Small Angle DeviationDocument7 pages2008 Appl Opt - Prism Interferometer - Small Angle DeviationnorbdudeNo ratings yet
- 2010 AO - Lee - Rolland - Dual Detection FD OCTDocument3 pages2010 AO - Lee - Rolland - Dual Detection FD OCTnorbdudeNo ratings yet
- 2009 SpringerOpt Review - OCT PT Carii DentareDocument6 pages2009 SpringerOpt Review - OCT PT Carii DentarenorbdudeNo ratings yet
- 2007 OPEX Baumann - FD OCT - No Phase ShiftersDocument13 pages2007 OPEX Baumann - FD OCT - No Phase ShiftersnorbdudeNo ratings yet
- 2003 - Taylor & Francis Chap - Montagu - GS and Resonant ScannersDocument53 pages2003 - Taylor & Francis Chap - Montagu - GS and Resonant ScannersnorbdudeNo ratings yet
- 2007 JBO Jenkins 4D Scan Avian Heart XDocument3 pages2007 JBO Jenkins 4D Scan Avian Heart XnorbdudeNo ratings yet
- Booklet Global Marketing - 2013Document12 pagesBooklet Global Marketing - 2013norbdudeNo ratings yet
- 2011 PRER Elsevier - Podoleanu - Retina OCTDocument36 pages2011 PRER Elsevier - Podoleanu - Retina OCTnorbdudeNo ratings yet
- 2005 Ao Lee Rolland FD OctDocument14 pages2005 Ao Lee Rolland FD OctnorbdudeNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Problem Sheet 3Document2 pagesProblem Sheet 3balochfrahan.2003No ratings yet
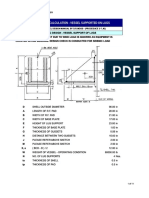
- Vessel seismic design calculationDocument11 pagesVessel seismic design calculationinnovativekarthiNo ratings yet
- PRELIM EXAM SOLUTIONSDocument8 pagesPRELIM EXAM SOLUTIONSamielynNo ratings yet
- IB EXtended Essay-Modeling The Variation in Specific Heat of A 4'-Octyl-4-Biphenyl-Carbonitrile Liquid Crystal Due To Phase TransitionDocument43 pagesIB EXtended Essay-Modeling The Variation in Specific Heat of A 4'-Octyl-4-Biphenyl-Carbonitrile Liquid Crystal Due To Phase TransitionAndrewNo ratings yet
- Tutorial 2 Chapter 2Document2 pagesTutorial 2 Chapter 2Marko IrwinNo ratings yet
- Quantum Tunneling Explained in 40 CharactersDocument19 pagesQuantum Tunneling Explained in 40 CharactersAlex ToasaNo ratings yet
- Nikolas TeslaDocument4 pagesNikolas TeslaJamesNo ratings yet
- ECH148 UC DavisDocument5 pagesECH148 UC DavisKaul PatrickNo ratings yet
- Ec2305 Transmission Lines & Wave Guides Question BankDocument6 pagesEc2305 Transmission Lines & Wave Guides Question BankharvishNo ratings yet
- Iare - HVDC - Lecture Notes PDFDocument57 pagesIare - HVDC - Lecture Notes PDFShakeeb ArefinNo ratings yet
- Ruta Al Caos PDFDocument33 pagesRuta Al Caos PDFDiego VilchesNo ratings yet
- Moody Chart Solver, HDocument3 pagesMoody Chart Solver, HAnonymous LrKeCiUNo ratings yet
- Springback of Thin-Walled Tube NC Precision Bending and Its Numerical SimulationDocument8 pagesSpringback of Thin-Walled Tube NC Precision Bending and Its Numerical SimulationYasser BouktirNo ratings yet
- United States Patent: (10) Patent No.: US 7482,597 B2Document22 pagesUnited States Patent: (10) Patent No.: US 7482,597 B2JustaUser2No ratings yet
- LTB Part2 F14 OptDocument15 pagesLTB Part2 F14 OptNejib GhazouaniNo ratings yet
- Aeropolis CPT LogsDocument10 pagesAeropolis CPT LogsHarianto RamadhanNo ratings yet
- Determine Amount of Oxygen in Tank from Pressure and TemperatureDocument3 pagesDetermine Amount of Oxygen in Tank from Pressure and Temperatureyeng botzNo ratings yet
- On FACTSDocument33 pagesOn FACTSAravind Babu100% (1)
- Etg 1 02Document9 pagesEtg 1 02Tapas RoyNo ratings yet
- Effects of solution heat treatment on microstructure and mechanical properties of AZ61-0.7Si magnesium alloyDocument5 pagesEffects of solution heat treatment on microstructure and mechanical properties of AZ61-0.7Si magnesium alloysujit_sekharNo ratings yet
- UNSW Mid-Session Exam Sample for MATS2005 Fluid Dynamics and Heat TransferDocument2 pagesUNSW Mid-Session Exam Sample for MATS2005 Fluid Dynamics and Heat TransferPaulo PolloNo ratings yet
- 9702p2vectorsallcompleted 150816104932 Lva1 App6891Document17 pages9702p2vectorsallcompleted 150816104932 Lva1 App6891Suman Pant0% (1)
- 2019 Summer Question Paper (Msbte Study Resources)Document5 pages2019 Summer Question Paper (Msbte Study Resources)Ashish pathareNo ratings yet
- An Improved Quadrilateral Flat Element With Drilling Degrees of Freedom For Shell Structural AnalysisDocument35 pagesAn Improved Quadrilateral Flat Element With Drilling Degrees of Freedom For Shell Structural AnalysisDaniele Di LucaNo ratings yet
- Sample Number Notes Atmospheric Pressure Patmos (Kpa) Fan Setting S (%) Fan Speed N (RPM) Air Temperature T (°C)Document3 pagesSample Number Notes Atmospheric Pressure Patmos (Kpa) Fan Setting S (%) Fan Speed N (RPM) Air Temperature T (°C)Umair MaqboolNo ratings yet
- Tesla's Contributions to Wireless Communication DiscussedDocument10 pagesTesla's Contributions to Wireless Communication Discussedharishkumarsingh100% (1)
- PG - M.sc. - Physics - 345 21 - Quantum Mechanics-IDocument304 pagesPG - M.sc. - Physics - 345 21 - Quantum Mechanics-I17 CSE Lokesh VNo ratings yet
- Physics Mechanics Help BookletDocument88 pagesPhysics Mechanics Help Bookletdj7597100% (1)
- Introduction 2Document30 pagesIntroduction 2niteshNo ratings yet
- Creep Testing Kappa SSDocument2 pagesCreep Testing Kappa SSGustavo LealNo ratings yet