Printer Carriage Motion Control Laboratory
Printer Carriage Motion Control
Learning Objectives By the end of this laboratory experiment, the experimenter should be able to: Use a quad push-pull driver chip for bi-directional dc motor control. Use reflective photo-switches, opto-interrupter switches, and micro-switches for motion control. Explain how and why limit switches are used to prevent over-travel. Components Qty. 1 1 1 1 1 2 1 1 Overview The purpose of this lab is to help you learn how construct a system with multiple sensors and an actuator and interface these with the ATmega16 microcontroller. Figure 1 shows how all the components come together to complete the printer system. The procedure below will guide you in building and testing pieces of the system and then integrating them into a complete system.
+5V 10 k
Item ATmega16 microcontroller, STK500 board, and serial port cable. Solderless breadboard Printer carriage assembly Optical-interrupter switch (Fairchild H21LTB) Photo-reflective opto sensor (Fairchild QRB1134) Roller lever momentary switch (Omron SS-5GL2) SN754410 (Quad Half-H driver) or L293D (Quad Push-Pull driver with diodes) 74LS04 hex inverter
A switch on the STK500.
reflective opto
tact sw
ATmega16 & STK500
optointerrupter SN754410 74LS04 IN 1 IN 2 EN 1
+7V
+5V
motor
OUT 1 OUT 2
+5V
Limit SW 1 Limit SW 2
OPTO GND
OPTO POWER
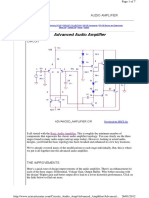
Figure 1. Printer carriage system. The printer carriage system contains: two sensors: a photo-reflective opto sensor and photo-interrupter switch; a power interface (the SN754410 and 1/6 of the 74LS04); the carriage motor, and two SPST switches to provide fail-safe end-of-travel limits. The connections between the modules and the STK500 are made through 5-way binding posts on the printer carriage assembly. The opto sensors and the SN754410 need +5 V to operate, and +7 V will be applied to the VS pin of the SN754410 to power the motor. San Jos State University Department of Mechanical and Aerospace Engineering
rev 1.1.1
16OCT2010
Page 1 of 7
Printer Carriage Motion Control Laboratory
Introduction Switches are common devices that permit or interrupt the flow of current In addition to simply controlling electrical power to a device (such as a motor or light), they can be used in motion control to detect whether or not a movable element has reached a predetermined position. Mechanical switches come in a variety of designs. They are categorized by the number of poles and throws they have. The number of poles represents the number of separate circuits that can be completed by the same action of the actuating lever or button. The number of throws represents the number of individual contacts for each pole. The most common types are shown in Figure 2 below.
Single-pole/single-throw (SPST) Single-pole/double-throw (SPDT)
Double-pole/single-throw (DPST)
Double-pole/double-throw (DPDT)
Figure 2. Examples of different switch configurations. The number of poles represents the number of separate circuits that can be completed by the same action of the movable contact(s) inside the switch. The number of throws represents the number of individual contacts for each pole.
Micro-switches typically refer to mechanical switches of small size that have a spring-loaded, momentary contact, operated by a push-button directly or via a pivoted cantilever. Microswitches find use in many consumer products such as notebook computers, appliances (to detect if a cover is closed), etc. Switches are comprised of moving or sliding mechanical elements are designed to operate for thousands to hundreds of thousands of on-off cycles. (What type of switch are the buttons on the STK500?) Opto-switches (e.g. opto-interrupters, etc.) are non-mechanical switches that use a light-emitting diode (LED) and a phototransistor. Light from the LED shines toward the base of a photransistor across a gap in the housing of the switch. The output of the photransistor will indicate whether or not something is blocking the light from the LED. Opto-interrupters are often used in mechatronic devices to indicate that a movable element has reached its desired position or endof-travel. Examples include printers, copiers, and manufacturing automation. Opto-interrupters are attractive to use, because they are solid-state, reliable, relatively inexpensive, and are straightforward to interface with logic circuits. Since they operate without physical contact, they have the advantages of longer lifetime, higher reliability, and faster actuation time compared to mechanical switches. You are going to use two types of opto-switches, a reflective (Fairchild QRB1134) and an interrupter-type (Fairchild H21LTB) on a printer mechanism and use them in driving a printer carriage between preset limits. You will also use two SPST microswitches to provide a fail-safe limit on the end-of-travel of the carriage in case one of the opto-switches fails. Assembling the System Like we have done in past expermiments, we will again construct the system in a modular way by building and testing pieces of the system as we go. This is a good general approach in any kind of electronic work, system design, or even computer programming. Avoid the temptation to wire everything up first and hope that it will all work the first time. Such an approach is doomed
San Jos State University Department of Mechanical and Aerospace Engineering
rev 1.1.1
16OCT2010
Page 2 of 7
Printer Carriage Motion Control Laboratory
to fail, and youll end up spending more time trying to figure out what is not working than if you jus build and test subsystems as you go along. First you will work with the sensors, and make sure that they are working properly; then youll connect the sensors to the ATmega16; then youll work with the SN754410 chip; then you will pull everything together to complete the printer system. Get a printer carriage assembly from your lab instructor. The next three sections will guide you through some tests to make sure that all the sensors on the assembly are working properly. Reflective Opto-switch First, before connecting anything, check that the reflective opto-switch, which is mounted on a bracket and attached to the side of the printer closest to the motor, is operating properly using the procedure below. 1. Set the HP E3630A Triple Output Power Supply to output +5V and +7V. Using banana-tobanana test leads, connect the +5V output and the Common output from the power supply to the respective OPTO POWER and the OPTO GND jacks on the printer carriage assembly. Measure the voltage at the binding post that is connected to the output of the reflective optosensor (which is shaped like an arrow head) when the aluminum plate on the carriage is in front of its face (this is the blocked condition). What voltage do you measure, and what does this voltage represent, logic high or low? Move the printer carriage, so that the reflective optosensor is no longer blocked, and measure its output voltage. What voltage do you measure, and what does this voltage represent, logic high or low? What should the voltages be in parts 1 and 2?
2.
3.
4.
If you are satisfied that the reflective opto-switch is working correctly, go on. If not, figure out what is wrong, and fix it, or ask you lab instructor for help. Opto-interrupter Check that the photo-interrupter (the one with the big slot in it that is mounted on a bracket and attached to the side of the printer frame furthest away from the motor) is operating properly. 4. Measure the voltage at the binding post that is connected to the output of the optointerrupter when the aluminum plate on the carriage is in its slot. What voltage do you measure, and what does this voltage represent, logic high or low? Measure the voltage at the output when the sensor is unblocked. What voltage do you measure, and what does this voltage represent, logic high or low? What should the voltages be in parts 4 and 5?
5. 6.
If you are satisfied that the photo-interrupter is working correctly, go on. If not, figure out what is wrong, and fix it, or ask you lab instructor for help. Limit Switches Move the printer carriage by hand, and make sure that each of the two microswitches at the far right and left limits of travel will be actuated when the aluminum flag on the carriage passes beneath them. Use the DMM to check for continuity between the OUT1 and OUT2 binding posts first with the roller levers from both switches unpressed, then with each switch, one at a time,
San Jos State University Department of Mechanical and Aerospace Engineering
rev 1.1.1
16OCT2010
Page 3 of 7
Printer Carriage Motion Control Laboratory
with its roller lever pressed. Continuity should be broken when either of the roller levers is pressed. These switches will be used to cut the power to the motor if the carriage travels beyond the opto-switches. It is very important that any device you design with moving components have some means to reliably prevent or deal with over-travel. Over-travel protection is important to avoid damage to the device and ensure the safety of others working with the machine or in its near vicinity. Connecting the Optical Sensors to the ATmega16 Connect the ATmega16 to the photo-reflective sensor and the opto-interrupter via the appropriate 5-way binding post, and write a short program that reads the state of each sensor and prints the corresponding logic level to the serial port. You may use any input port and pins you wish (except for PD0 and PD1, which are used for the serial port). If you need help remembering how to setup and use the serial port, refer to your old labs. Verify that your program correctly detects the change of state of the switches. Show your lab instructor that your program functions properly before going on Draw your own schematic, and document which pins you used. Include this code and schematics, and label it appropriately in your lab report. 74LS04 Hex Inverter The 74LS04 is a logic IC containing six independent inverters or NOT gates. Figure 3 shows how the chip is layed out. The output of an inverter or NOT gate simply reverses the logic level that is presented at its input. So, if logic high is presented at the input, the output of the inverter will be at logic low.
74LS04
1 2 3 4 5 6 7 14 13 12 11 10 9 8
+5 V
Figure 3. 74LS04 pinout. The 74LS04 is a logic IC containing six inverters, also called NOT gates. The schematic symbol for a NOT gate is a triangle with an open circle at the end. Note that you must apply +5V and ground for the 74LS04 to function.
IMPORTANT: DO NOT ASSUME any logic IC chip is working when you receive it. You MUST test the logic level on the pin-outs you are working from. For example, observing Figure 3, if you chose to work with pin 1 and pin 2 as your designated inverter, test them by applying +5 Volts to pin 1 and verify that pin 2 is 0 Volts, then apply 0 Volts to pin 1 and verify that pin 2 is +5 Volts. Dont forget that you need to apply +5V and ground for the 74LS04 to function. NOTE: The hex inverters function can also be done entirely by software. By using the not operator (~), you can also reverse the logic level presented at an input, and use it to set the state of an output pin (i.e. PORTB = ~PINA; will set all pins on output port B to the inverted state of corresponding port A inputs).
San Jos State University Department of Mechanical and Aerospace Engineering
rev 1.1.1
16OCT2010
Page 4 of 7
Printer Carriage Motion Control Laboratory
Quad Half-H Driver The SN754410 (or L293D) is an IC designed for driving inductive loads, such as motors and solenoids from logic level signals. The chip has four, half H-bridges (also known as push-pull channels, because each of the four output can either source (push) or sink (pull) current), and each pair has an enabling input, and integral clamping (flyback) diodes as shown in Figure 4. Each channel can source or sink up to 600 mA continuous current. A push-pull channel consists of two transistors, a PNP and an NPN, in which the collectors and bases of the two devices are connected. When a logic-level signal is applied to the common base, one of the transistors will be saturated and the other cut-off. This arrangement allows the channel to either source (push) or sink (pull) current from the common collector junction, hence the name push-pull. If two channels are used, a dc motor can be driven bi-directionally from a power supply of single polarity.
SN754410
Enable 1 In 1 Out 1
1 2 3 4 5
+VS +VS
+5 V
16 15 14 13 12 11 10 9
VS=+7V is used to power the motor.
Out 2 In 2
6 7 8
+VS
Figure 4. SN754410 (or L293D) connections. The SN754410 is a four-channel push-pull driver chip with integral clamping diodes. Only two of the four channels are shown. The chip needs +5 V applied to pin 16 to operate. +VS is the voltage of the supply used to drive the motor (use +7 V for Vs). Channels 1and 2 will be enabled when logic high (+5 V) is applied to pin 1 (Enable 1).
74LS04 and SN754410 connection Pin 1 of the SN754410 is the enable input (abbreviated EN1) for the channels 1 and 2 (see Figure 4). When pin 1 is taken to logic high, the pair of push-pull channels (IN1/OUT1 and IN2/OUT2) is enabled, meaning that they are made operational. Thus if a logic high is applied to pin 1 (In 1), then pin 3 (Out 1) will go high (to about 1.4 V lower than Vs). If a logic low is applied to pin 2 (In 1), pin 3 (Out 1) will go low (to about 1.2 V above ground). When pin1 (EN1) is taken to logic low, the two channels are diasabled, which means that their outputs are effectively disconnected from the circuit. Connect the microcontroller to the 74LS04 and the SN754410 as shown in Figure 5. Set the +20V output terminal on the HP power supply so that it will output +7 V (check the voltage BEFORE you make the connection described next). Connect one of the tact switches provided on the STK500 interface board to an input pin of the ATmega16 using an appropriate jumper. Write a short program (label it appropriately) that looks for the switch to be pressed, enables EN1 of the SN754410, and toggles IN 1 and IN 2 (by toggling the bit
San Jos State University Department of Mechanical and Aerospace Engineering
rev 1.1.1
16OCT2010
Page 5 of 7
Printer Carriage Motion Control Laboratory
written to PB1) continuously. Verify that the voltage measured between OUT 1 and OUT 2 on the SN754410 reverses polarity when the bit written to PB1 toggles.
+5V 10 k
Switch on the STK500
PA0
tact sw
Atmega 16 & STK500
1/6 of 74LS04
SN754410 IN 1 OUT 1 OUT 2
PB1 PB0
IN 2 EN 1
Figure 5. Connections to the ATmega16, the 74LS04, and the SN754410 (or L293). Note that the connections for +5 and Vs are not shown on the SN754410, but need to be connected. Also, the switch and resistor shown is already on the STK500. You just need to jumper the switch pin to PA0 on the microcontroller.
Motor Connection
Assuming that you have gotten all the pieces to work so far, you are now ready to interface the printer carriage motor, and get things moving! Connect the output of the optoswitches to the ATmega16 if they are not still connected. The general layout of your system should look like Figure 6 below.
+5V 10 k
A switch on the STK500.
reflective opto
PA0 tact sw
ATmega16 & STK500
optointerrupter SN754410 74LS04 IN 1 IN 2 EN 1
+7V
+5V
motor
OUT 1 OUT 2
+5V
PB1 PB0
Limit SW 1 Limit SW 2
OPTO GND
OPTO POWER
Figure 6. Printer Carriage Motion Controller System. The carriage is driven between limits set by the two optoswitches continuously after the program detects that the tact switch has closed.
San Jos State University Department of Mechanical and Aerospace Engineering
rev 1.1.1
16OCT2010
Page 6 of 7
Printer Carriage Motion Control Laboratory
Motor Connection Write a program that will drive the carriage back and forth between the opto-switches when the tact switch is pressed. Before you jump in and start coding, think about the logic of how you are going accomplish the task! Write a flow chart and develop the logic of your code before you try to move the carriage. Use your experience from previous labs to fashion your program, and do so by building and testing pieces of your code, rather than trying to write the whole program from start to finish in one shot. IT IS EXTREMELY IMPORTANT THAT THE LIMIT SWITCHES FUNCTION PROPERLY. IF YOU DRIVE THE CARRIAGE BEYOND THE OPTO-SWITCHES, MAKE SURE THAT THE LIMIT SWITCHES CUT POWER TO THE MOTOR. The motor, belt, and/or carriage assembly may be damaged if the carriage crashes at the end of the stroke. We dont want you to have to buy us new printer if your break this one! For more information on the SN754410, see http://focus.ti.com/docs/prod/folders/print/sn754410.html. For more information on the 74LS04, look at the data sheets on the Texas Instruments web site: http://www.ti.com
San Jos State University Department of Mechanical and Aerospace Engineering
rev 1.1.1
16OCT2010
Page 7 of 7
You might also like
- BuellTuningGuide en V2.0Document148 pagesBuellTuningGuide en V2.0William Bernard JrNo ratings yet
- st60 IlsDocument17 pagesst60 Ilsjeanpaul CAYTANNo ratings yet
- 3 Ym 30Document224 pages3 Ym 30Arif Riansyah0% (1)
- Monografico CNC EngDocument73 pagesMonografico CNC Engjeanpaul CAYTANNo ratings yet
- Sangean ATS-909 / Radio Shack DX-398, Roberts R861: What Is The ATS-909? What Is The DX-398?Document17 pagesSangean ATS-909 / Radio Shack DX-398, Roberts R861: What Is The ATS-909? What Is The DX-398?jeanpaul CAYTANNo ratings yet
- Lesson 9 Assembler DirectivesDocument8 pagesLesson 9 Assembler Directivesjeanpaul CAYTANNo ratings yet
- I S Bus Specification: 1.0 2.0 Basic Serial Bus RequirementsDocument7 pagesI S Bus Specification: 1.0 2.0 Basic Serial Bus RequirementseballiriNo ratings yet
- A60 InstallationDocument50 pagesA60 Installationjeanpaul CAYTANNo ratings yet
- Paul Mali - Magnetic Amplifiers - Principles and ApplicationsDocument110 pagesPaul Mali - Magnetic Amplifiers - Principles and ApplicationsJuri Loktionov100% (1)
- Layout PCB High Speed CircuitsDocument7 pagesLayout PCB High Speed Circuitsjeanpaul CAYTANNo ratings yet
- Advanced Ampli e CircuitsDocument7 pagesAdvanced Ampli e Circuitsjeanpaul CAYTANNo ratings yet
- Anenometer PROAWVFLYERDocument1 pageAnenometer PROAWVFLYERjeanpaul CAYTANNo ratings yet
- A Practical Guide To High-Speed Printed-Circuit-Board LayoutDocument6 pagesA Practical Guide To High-Speed Printed-Circuit-Board Layoutyamaha640No ratings yet
- A60 HandbookDocument110 pagesA60 Handbookjeanpaul CAYTANNo ratings yet
- Volvo - Penta - MD2010 20 30 40Document81 pagesVolvo - Penta - MD2010 20 30 40vizzinni100% (2)
- RoadmapDocument2 pagesRoadmapjeanpaul CAYTANNo ratings yet
- A Practical Guide To High-Speed Printed-Circuit-Board LayoutDocument6 pagesA Practical Guide To High-Speed Printed-Circuit-Board Layoutyamaha640No ratings yet
- BLRBAC Safe Firing of Auxiliary Fuel (February 2012) PDFDocument72 pagesBLRBAC Safe Firing of Auxiliary Fuel (February 2012) PDFjeanpaul CAYTANNo ratings yet
- Global Maritime Distress and Safety System (GMDSS)Document39 pagesGlobal Maritime Distress and Safety System (GMDSS)jeanpaul CAYTANNo ratings yet
- BLRBACEmergencyShutdownProcedureOctober2009 PDFDocument17 pagesBLRBACEmergencyShutdownProcedureOctober2009 PDFjeanpaul CAYTANNo ratings yet
- BLRBACEmergencyShutdownProcedureOctober2009 PDFDocument17 pagesBLRBACEmergencyShutdownProcedureOctober2009 PDFjeanpaul CAYTANNo ratings yet
- BLRBAC Safe Firing of Auxiliary Fuel (February 2012) PDFDocument72 pagesBLRBAC Safe Firing of Auxiliary Fuel (February 2012) PDFjeanpaul CAYTANNo ratings yet
- Evinrude Carbfuel PumpDocument15 pagesEvinrude Carbfuel Pumpjeanpaul CAYTAN100% (1)
- Proton d1200 Circuit DiagramDocument1 pageProton d1200 Circuit Diagramjeanpaul CAYTANNo ratings yet
- Sweet Spot PDFDocument18 pagesSweet Spot PDFcornondaNo ratings yet
- Evinrude Pump Lower UnitDocument19 pagesEvinrude Pump Lower Unitjeanpaul CAYTAN100% (1)
- Transistor Interfacing Semicon Mrobot - ch6Document44 pagesTransistor Interfacing Semicon Mrobot - ch6jeanpaul CAYTANNo ratings yet
- Ethernet (DHCP) Configuration Guide - Windows 95/98/meDocument2 pagesEthernet (DHCP) Configuration Guide - Windows 95/98/mejeanpaul CAYTANNo ratings yet
- Evinrude Carbfuel PumpDocument15 pagesEvinrude Carbfuel Pumpjeanpaul CAYTAN100% (1)
- MicrocontrollerDocument3 pagesMicrocontrollerjeanpaul CAYTANNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Newtons Laws: By: Armaan NooraniDocument10 pagesNewtons Laws: By: Armaan NooraniArmaan NooraniNo ratings yet
- Varispeed F7 Manual PDFDocument478 pagesVarispeed F7 Manual PDFpranab_473664367100% (2)
- EHB en File 10.5.1 PressureTemperature Ratings Acc To JIS B 2220 2239Document4 pagesEHB en File 10.5.1 PressureTemperature Ratings Acc To JIS B 2220 2239wholenumberNo ratings yet
- Tulsion A 23SMDocument2 pagesTulsion A 23SMMuhammad FikriansyahNo ratings yet
- Projectile Motion: AP Physics CDocument26 pagesProjectile Motion: AP Physics CCedric VargasNo ratings yet
- AGI MiniSting ManualDocument108 pagesAGI MiniSting ManualVvg ValenciaNo ratings yet
- TDA7072 DatasheetDocument11 pagesTDA7072 Datasheetsergio_741No ratings yet
- Categories and Sheaves PDFDocument495 pagesCategories and Sheaves PDFcarlos100% (1)
- AME101 LectureNotesDocument142 pagesAME101 LectureNotesNagarjunavarma GannaNo ratings yet
- What Is Solvatochromism?: Alberto Marini, Aurora Mun Oz-Losa, Alessandro Biancardi, and Benedetta MennucciDocument8 pagesWhat Is Solvatochromism?: Alberto Marini, Aurora Mun Oz-Losa, Alessandro Biancardi, and Benedetta MennucciJadaNo ratings yet
- Chapter 16 Fourier Series AnalysisDocument18 pagesChapter 16 Fourier Series AnalysisKarim KhanNo ratings yet
- EE276 Test 8Document3 pagesEE276 Test 8fred francisNo ratings yet
- Chapter 1Document11 pagesChapter 1Crist John PastorNo ratings yet
- Assignment 3 ShazmirDocument10 pagesAssignment 3 ShazmirVedarajan ArmugamNo ratings yet
- Source: "Sears and Zemansky's University Physics With: Fig. 1. The Work Done On A Baseball Moving inDocument8 pagesSource: "Sears and Zemansky's University Physics With: Fig. 1. The Work Done On A Baseball Moving inMaria Diane DizonNo ratings yet
- Aggregates in ConcreteDocument16 pagesAggregates in Concretevinaykrishna123No ratings yet
- Karakteristik Motor KomponDocument14 pagesKarakteristik Motor KomponPola RismaNo ratings yet
- Grade 7 Chem NF 1st Term (1) - 1-6Document6 pagesGrade 7 Chem NF 1st Term (1) - 1-6zizo gamingNo ratings yet
- DE38#######KS###: Data Sheet and Instruction Manual DE38 Digital Differential Pressure Transmitter / SwitchDocument12 pagesDE38#######KS###: Data Sheet and Instruction Manual DE38 Digital Differential Pressure Transmitter / SwitchAmirouche BenlakehalNo ratings yet
- Subject - Wise - Result EditedDocument34 pagesSubject - Wise - Result EditedSiva RamanNo ratings yet
- Design of Containemt IsolatorsDocument72 pagesDesign of Containemt IsolatorsSweekar Borkar50% (2)
- Number Patterns and Sequences and Decimals HotsDocument3 pagesNumber Patterns and Sequences and Decimals Hotszarina binti jusohNo ratings yet
- New Oscillation Criteria For Second Order Nonlinear Differential EquationsDocument6 pagesNew Oscillation Criteria For Second Order Nonlinear Differential EquationsresearchinventyNo ratings yet
- 1927 06 The Electric ArcDocument16 pages1927 06 The Electric ArcdeyvimaycolNo ratings yet
- DS160 Service Manual English 1Document64 pagesDS160 Service Manual English 1Roman Cupul RuizNo ratings yet
- F Wedge+Pseudo 18 07 2021 TestDocument2 pagesF Wedge+Pseudo 18 07 2021 TestAryanNo ratings yet
- Thermal Conductivity of MaterialDocument7 pagesThermal Conductivity of MaterialPhyu Mar Thein Kyaw0% (1)
- Flow Around SphereDocument11 pagesFlow Around SpheremiladNo ratings yet
- Types and Characteristics of Precipitation - pdf-395658211 PDFDocument8 pagesTypes and Characteristics of Precipitation - pdf-395658211 PDFGio TtaNo ratings yet
- Micro Tower Maps 150909Document12 pagesMicro Tower Maps 150909Luis TorcidaNo ratings yet