You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Condition Monitoring of Machinery Is Through FFT of Field Current, Voltage, Stator Current and Shaft CurrentDocument1 pageCondition Monitoring of Machinery Is Through FFT of Field Current, Voltage, Stator Current and Shaft Currentshobhan1984No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Report of Unchahar Unit 2 Bearing 6 VibrationDocument8 pagesReport of Unchahar Unit 2 Bearing 6 Vibrationshobhan1984No ratings yet
- Phrasal Verbs List PDFDocument20 pagesPhrasal Verbs List PDFNelly Vicky CruzNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- 501 Sentence Completion QuestionsDocument194 pages501 Sentence Completion QuestionsSapna Ludhani100% (4)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Small Hydro AnalysisDocument52 pagesSmall Hydro Analysisapi-26947710100% (2)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Bar Chart Anpara U#2 PDFDocument1 pageBar Chart Anpara U#2 PDFshobhan1984No ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Bhel RSC VaranasiDocument29 pagesBhel RSC Varanasishobhan1984No ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Hydrogen Leakage in LMW Set (Thrust Seal)Document2 pagesHydrogen Leakage in LMW Set (Thrust Seal)shobhan1984No ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Quality Our CommitmentDocument3 pagesQuality Our Commitmentshobhan1984No ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Hydrogen Gas SensorsDocument21 pagesHydrogen Gas Sensorsshobhan1984No ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hydrogen Sensor Fabrication FlowchartDocument2 pagesHydrogen Sensor Fabrication Flowchartshobhan1984No ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
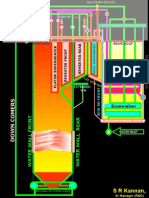
- Boiler Flow DiagramDocument1 pageBoiler Flow Diagramshobhan1984No ratings yet
- Rule Based Sensor Fault IdentificationDocument1 pageRule Based Sensor Fault Identificationshobhan1984No ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Hydrogen Gas SensorsDocument21 pagesHydrogen Gas Sensorsshobhan1984No ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Liberalized Economy Differences From State-Controlled One Which One Is BetterDocument1 pageLiberalized Economy Differences From State-Controlled One Which One Is Bettershobhan1984No ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Neural LogicDocument43 pagesNeural Logicshobhan1984No ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Presentation of RSC Varanasi EdittedDocument27 pagesPresentation of RSC Varanasi Edittedshobhan1984No ratings yet
- Design of Multi-Channel and Distributed Wireless Communication Network in Under Water VehicleDocument27 pagesDesign of Multi-Channel and Distributed Wireless Communication Network in Under Water Vehicleshobhan1984No ratings yet
- Bhel RSC VaranasiDocument30 pagesBhel RSC Varanasishobhan1984No ratings yet
- Vibration PDFDocument74 pagesVibration PDFshobhan1984No ratings yet
- Corruption in IndiaDocument1 pageCorruption in Indiashobhan1984No ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Pros and Cons of Democracy in India and Abroad Comparison of Democracy With Other Modes of GovernmentDocument1 pagePros and Cons of Democracy in India and Abroad Comparison of Democracy With Other Modes of Governmentshobhan1984No ratings yet
- Tnerc CodesDocument84 pagesTnerc CodesBala SubramanianNo ratings yet
- Threshold LogicDocument8 pagesThreshold Logicshobhan1984No ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- 19-AC Motor ProtectionDocument16 pages19-AC Motor ProtectionSristick100% (7)
- Overspeed Protection Device & Coincidence Limit SwitchDocument1 pageOverspeed Protection Device & Coincidence Limit Switchshobhan1984No ratings yet
- 1-Turbine Operation & MaintenanceDocument17 pages1-Turbine Operation & Maintenanceshobhan1984No ratings yet
- 4 A Large Steam TurbineDocument22 pages4 A Large Steam TurbineabhikaushikNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Monitoring OF Power Plant OperationDocument9 pagesMonitoring OF Power Plant Operationshobhan1984No ratings yet
- Lecture19 Part 4 Lenzs LawDocument7 pagesLecture19 Part 4 Lenzs LawNoor SultanNo ratings yet
- isoMED427P DB enDocument6 pagesisoMED427P DB enMirwansyah TanjungNo ratings yet
- Basic Aerodynamics Module 8Document86 pagesBasic Aerodynamics Module 8Danish AlamNo ratings yet
- Impact of Jet (Lab 2)Document16 pagesImpact of Jet (Lab 2)Nur Aqilah Mohd ZaidiNo ratings yet
- Application of Gauss's LawDocument8 pagesApplication of Gauss's LawAkhmas MerajNo ratings yet
- PRELIM To FINALS ELECTRIC DEVICE THEORY 1Document9 pagesPRELIM To FINALS ELECTRIC DEVICE THEORY 1Lrac semaj NarivNo ratings yet
- Spacecraft Attitude ControlDocument14 pagesSpacecraft Attitude Controla320neoNo ratings yet
- Calculation of The Impedance of Rotor Cage End RingsDocument10 pagesCalculation of The Impedance of Rotor Cage End RingsjalilemadiNo ratings yet
- Power DiodesDocument46 pagesPower DiodesJay R BallonNo ratings yet
- Iec TR 61869-102-2014Document60 pagesIec TR 61869-102-2014moham akhNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- May 2005 Subject Report (TZ1)Document22 pagesMay 2005 Subject Report (TZ1)Swee Boon OngNo ratings yet
- (A) MARTIN 2003 - What Is Field TheoryDocument50 pages(A) MARTIN 2003 - What Is Field TheoryDiego Maganhotto CoraiolaNo ratings yet
- A New High Efficiency Power Amplifier For Modulated Waves by W. H. DohertyDocument20 pagesA New High Efficiency Power Amplifier For Modulated Waves by W. H. DohertySatadal GuptaNo ratings yet
- 7E Model Electric Circuit Sample DLPDocument10 pages7E Model Electric Circuit Sample DLPRamir BecoyNo ratings yet
- Gauss' Law PDFDocument22 pagesGauss' Law PDFPaul BryanNo ratings yet
- E210, ES210, & EA210 Military Specified: General CharacteristicsDocument6 pagesE210, ES210, & EA210 Military Specified: General CharacteristicsNalex1No ratings yet
- ID FanDocument7 pagesID FanDony RamdhaniNo ratings yet
- Maxwell EquationDocument10 pagesMaxwell EquationRakesh KumarNo ratings yet
- X STD - Science EM PDFDocument360 pagesX STD - Science EM PDFshan mugamNo ratings yet
- School of Physics & Materials Science: Thapar University, PatialaDocument1 pageSchool of Physics & Materials Science: Thapar University, PatialaPRADYUMAN PRATAP CHAUDHARYNo ratings yet
- Varun Kumar GDocument5 pagesVarun Kumar GVarun KumarNo ratings yet
- 编 号 (No.) : LNDK-TSFA-DQ-*** 密 级 (Security) : 版 本 (Version) :Document21 pages编 号 (No.) : LNDK-TSFA-DQ-*** 密 级 (Security) : 版 本 (Version) :刘佳No ratings yet
- EHV CatalogueDocument29 pagesEHV Cataloguefigv1975No ratings yet
- Topic 6. AC Circuit AnalysisDocument93 pagesTopic 6. AC Circuit Analysiskeinhuat79100% (1)
- Multiple Choice Questions of High Voltage Engineering (01-15)Document25 pagesMultiple Choice Questions of High Voltage Engineering (01-15)DHARANI PATHINo ratings yet
- Network Analysis SyllabusDocument4 pagesNetwork Analysis SyllabusAyushnaitik PatelNo ratings yet
- Design and Testing of Electrical MachinesDocument32 pagesDesign and Testing of Electrical MachinesSikander Hayat SarmadNo ratings yet
- Pea Grid Code (Eng)Document18 pagesPea Grid Code (Eng)Thanasate PrasongsookNo ratings yet
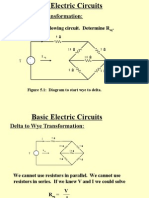
- Circuits 1 - Delta To WyeDocument11 pagesCircuits 1 - Delta To WyeAnthony CortezNo ratings yet
- Basics of VibrationsDocument45 pagesBasics of Vibrationsravimech_862750No ratings yet
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 4.5 out of 5 stars4.5/5 (9)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosFrom EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosRating: 5 out of 5 stars5/5 (1)