You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Love&Responsibility John Paul IIDocument32 pagesLove&Responsibility John Paul IIAlexandra MuresanNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Rate AnalysisDocument38 pagesRate AnalysisSarin0% (1)
- RCD Chapter 6 Columns and Walls DesignDocument47 pagesRCD Chapter 6 Columns and Walls Designkongl100% (3)
- B0054832-4 Erection Arrangement DRB-XCL PC Fired Burner C.C.WDocument1 pageB0054832-4 Erection Arrangement DRB-XCL PC Fired Burner C.C.WNanang Cesc UttaNo ratings yet
- COMPOSITE WING OPTIMALIZATION USING FEM ANALYSES SYSTEMS by Miroslav Spišák - Peter MalatinDocument3 pagesCOMPOSITE WING OPTIMALIZATION USING FEM ANALYSES SYSTEMS by Miroslav Spišák - Peter MalatinVesa RäisänenNo ratings yet
- CAESAR II Pipe Stress Analysis GuideDocument37 pagesCAESAR II Pipe Stress Analysis GuideEko Idris Hutagaol100% (1)
- Linen and Laundry DepartmentDocument37 pagesLinen and Laundry DepartmentHannah Aven Malata71% (7)
- Additive Specialties and High Performance ConcentratesDocument11 pagesAdditive Specialties and High Performance ConcentratesXuân Giang NguyễnNo ratings yet
- Tunnel Construction Techniques and Their DetailsDocument72 pagesTunnel Construction Techniques and Their DetailsRajesh Khadka100% (1)
- Thermal Power Plant Layout and OperationDocument77 pagesThermal Power Plant Layout and OperationAlexNo ratings yet
- List of Student in Group A, B, C in DTSDocument2 pagesList of Student in Group A, B, C in DTSNalla PaiyanNo ratings yet
- CK College of Engineering & Technology: Cuddalore-3Document1 pageCK College of Engineering & Technology: Cuddalore-3Nalla PaiyanNo ratings yet
- C K College of Engineering & Technology: Cuddalore-3Document1 pageC K College of Engineering & Technology: Cuddalore-3Nalla PaiyanNo ratings yet
- Special Issue:: ShipsDocument10 pagesSpecial Issue:: ShipsNitinNo ratings yet
- 13-3 - Modelling of FSWDocument36 pages13-3 - Modelling of FSWNalla PaiyanNo ratings yet
- C K College of Engineering & Technology: Cuddalore-3Document1 pageC K College of Engineering & Technology: Cuddalore-3Nalla PaiyanNo ratings yet
- Finite Element MethodDocument37 pagesFinite Element Methodmohsin160No ratings yet
- Program Slicing Techniques and Its ApplicationsDocument15 pagesProgram Slicing Techniques and Its ApplicationsijseaNo ratings yet
- Created by Image To PDF Trial Version, To Remove This Mark, Please Register This SoftwareDocument1 pageCreated by Image To PDF Trial Version, To Remove This Mark, Please Register This SoftwareNalla PaiyanNo ratings yet
- 15.cutter Location Data Optimization in 5 Axis Surface MachiningDocument10 pages15.cutter Location Data Optimization in 5 Axis Surface MachiningNalla PaiyanNo ratings yet
- Modelling Using AxisymmetryDocument8 pagesModelling Using AxisymmetryNalla PaiyanNo ratings yet
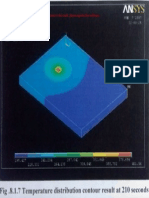
- Ansys FSW 6Document4 pagesAnsys FSW 6Nalla PaiyanNo ratings yet
- V52 57Document10 pagesV52 57Nalla PaiyanNo ratings yet
- Ansys FSW 14Document5 pagesAnsys FSW 14Nalla PaiyanNo ratings yet
- Friction Stir Welding Process Parameters For Joining Dissimilar Aluminum AlloysDocument14 pagesFriction Stir Welding Process Parameters For Joining Dissimilar Aluminum AlloysNalla PaiyanNo ratings yet
- Friction Stir Welding: An Introduction to the Process and its ApplicationsDocument29 pagesFriction Stir Welding: An Introduction to the Process and its ApplicationsNalla PaiyanNo ratings yet
- LpleDocument2 pagesLpleNalla PaiyanNo ratings yet
- Improving Reliability of Heat Transfer and Materials Flow Calculations During Friction Stir Welding of Dissimilar Aluminum AlloysDocument10 pagesImproving Reliability of Heat Transfer and Materials Flow Calculations During Friction Stir Welding of Dissimilar Aluminum AlloysNalla PaiyanNo ratings yet
- Ceres GAHT System BrochureDocument4 pagesCeres GAHT System BrochureeioNo ratings yet
- Tabela de Corrosão Little GiantDocument12 pagesTabela de Corrosão Little GiantAlex Sandro FerreiraNo ratings yet
- RX022Document356 pagesRX022ElZeroMJNo ratings yet
- Machine Design 1 Long Quiz 2 1Document5 pagesMachine Design 1 Long Quiz 2 1Cayle MalitNo ratings yet
- Importing Mining Chemicals From ChinaDocument6 pagesImporting Mining Chemicals From Chinacalisto_rNo ratings yet
- Waterpik Dual Power Pulse ZZR 769ME Instruction Manual PDFDocument2 pagesWaterpik Dual Power Pulse ZZR 769ME Instruction Manual PDFTezozómocNo ratings yet
- Conditions Under Which Fracture, Breakage, and Abnormal Wear Are Likely To Occur Carbide Tool Materials For Wear ResistanceDocument1 pageConditions Under Which Fracture, Breakage, and Abnormal Wear Are Likely To Occur Carbide Tool Materials For Wear Resistanceluis ortaNo ratings yet
- Astm A192 PDFDocument2 pagesAstm A192 PDFgaminNo ratings yet
- 100kW Induction Heater PrototypeDocument13 pages100kW Induction Heater PrototypeaungkyawmyoNo ratings yet
- IC200PBI001Document4 pagesIC200PBI001Humberto BalderasNo ratings yet
- 5600 Series Mechanical Heat DetectorsDocument2 pages5600 Series Mechanical Heat DetectorsHector Cueva LopezNo ratings yet
- Eumind Final Report - Group 3 - Waste Management - Hfs Powai - Go Green 2020-21-CompressedDocument40 pagesEumind Final Report - Group 3 - Waste Management - Hfs Powai - Go Green 2020-21-Compressedapi-539242855No ratings yet
- 07 r05310306 Thermal Engineering IIDocument8 pages07 r05310306 Thermal Engineering IIandhracollegesNo ratings yet
- ABB TC The RangeDocument16 pagesABB TC The Rangebabubhaiyya4211No ratings yet
- Durability of HDPE Geomembranes: R.Kerry Rowe, Henri P.SangamDocument19 pagesDurability of HDPE Geomembranes: R.Kerry Rowe, Henri P.SangamAnonymous ImoZI0363No ratings yet
- Introduction To Welding - MetallurgyDocument15 pagesIntroduction To Welding - Metallurgyramkishore_87100% (1)
- As 5056-2006 Metallic Coatings - Powder Metal (And Composites) Applied by Mechanical Means at Ambient TemperaDocument7 pagesAs 5056-2006 Metallic Coatings - Powder Metal (And Composites) Applied by Mechanical Means at Ambient TemperaSAI Global - APACNo ratings yet
- Manual SaniviteDocument26 pagesManual Sanivitejottings100% (1)
- HMT 7th Sem NIT Raipur QPaperDocument28 pagesHMT 7th Sem NIT Raipur QPaperShashi Bhushan PatelNo ratings yet
- Esquema Inverter FujiDocument18 pagesEsquema Inverter FujiRicardo Nicolau WerlangNo ratings yet