You might also like
- PID Controller: Navigation SearchDocument8 pagesPID Controller: Navigation SearchprashantshivanagiNo ratings yet
- PID controller basicsDocument6 pagesPID controller basicsdil17No ratings yet
- PID ControllerDocument17 pagesPID Controlleradetag0% (1)
- IPCDocument15 pagesIPCu can't see meNo ratings yet
- PID controller basicsDocument21 pagesPID controller basicsSandesh Kumar B VNo ratings yet
- PID ControllerDocument18 pagesPID ControllerCheng Khie Chieh100% (1)
- PID Controller: From Wikipedia, The Free EncyclopediaDocument17 pagesPID Controller: From Wikipedia, The Free EncyclopediatirupataiahxlNo ratings yet
- PID ControllersDocument58 pagesPID Controllerss12originalNo ratings yet
- PID ControlDocument11 pagesPID Controlhd03No ratings yet
- Control SystemDocument7 pagesControl SystemLeo LonardelliNo ratings yet
- W7ADocument15 pagesW7AShujah RashidNo ratings yet
- Report On Pid ControllerDocument14 pagesReport On Pid Controllersura samirNo ratings yet
- PID controller basics for process controlDocument16 pagesPID controller basics for process controlmarraurdersNo ratings yet
- PIDDocument17 pagesPIDFlorian Pjetri100% (1)
- ABB PID ControlDocument21 pagesABB PID Controlciocioi iancuNo ratings yet
- Tuning A PID Controller: Guillermo J. CostaDocument6 pagesTuning A PID Controller: Guillermo J. CostaDeepak RainaNo ratings yet
- Experiment No.1: Now Manually Move The AVS-1 Bar To Control The Flow Through The Valve in To The ContainerDocument16 pagesExperiment No.1: Now Manually Move The AVS-1 Bar To Control The Flow Through The Valve in To The ContainerfahadfiazNo ratings yet
- History of Control SystemDocument11 pagesHistory of Control Systemarvinlorenz100% (1)
- Control SystenDocument87 pagesControl SystenKpsingh KalsiNo ratings yet
- Control System - WikipediaDocument8 pagesControl System - WikipediafwefNo ratings yet
- PID Controller - Wikipedia, The Free EncyclopediaDocument18 pagesPID Controller - Wikipedia, The Free EncyclopediaWan MKNo ratings yet
- NI Tutorial 3782 enDocument4 pagesNI Tutorial 3782 enpetergoodingNo ratings yet
- Pid Control TheoryDocument8 pagesPid Control TheorySonu SinghNo ratings yet
- Chapter - 4 Control Configuration 4.1 Pid ControllerDocument8 pagesChapter - 4 Control Configuration 4.1 Pid ControllerMoorthy ManikandanNo ratings yet
- EVMS Full Notes PDFDocument78 pagesEVMS Full Notes PDFNaveen DhanurajNo ratings yet
- NI Tutorial 3782 enDocument4 pagesNI Tutorial 3782 enhiperboreoatlantecNo ratings yet
- PID ControllerDocument10 pagesPID ControllerFarid HazwanNo ratings yet
- PID ControlDocument3 pagesPID ControlDraganNo ratings yet
- Control System - المنهج المقرر PDFDocument122 pagesControl System - المنهج المقرر PDFTariq ZeyadNo ratings yet
- Pid EeeeDocument28 pagesPid Eeeecyprian obotaNo ratings yet
- Control SystemDocument6 pagesControl SystemkirandasNo ratings yet
- PID Controller: Control: The Proportional, The Integral and Derivative Values, Denoted PDocument16 pagesPID Controller: Control: The Proportional, The Integral and Derivative Values, Denoted PshaheerdurraniNo ratings yet
- Temperature Control Demonstration Unit: Experimental SetupDocument3 pagesTemperature Control Demonstration Unit: Experimental SetupHammad FazalNo ratings yet
- Manage and control devicesDocument6 pagesManage and control devicesSRI NANDANNo ratings yet
- Working or Operation of PID ControllerDocument7 pagesWorking or Operation of PID Controllerjohn glenn magnoNo ratings yet
- Process ControlDocument2 pagesProcess ControlFakharAbbasNo ratings yet
- ChE 5105 Group Experiment on PID Temperature ControlDocument10 pagesChE 5105 Group Experiment on PID Temperature ControlStephanie SomongcadNo ratings yet
- Ic 2003Document21 pagesIc 2003Dinesh KumarNo ratings yet
- Pid ControllerDocument20 pagesPid ControllerHarshal InamdarNo ratings yet
- Automatización 4ta Clase, Tipos de Opciones de ControlDocument6 pagesAutomatización 4ta Clase, Tipos de Opciones de Controlivandario17-1No ratings yet
- Introductory Concepts: ErrorDocument5 pagesIntroductory Concepts: ErrorbismilishfaqNo ratings yet
- Control SystemDocument8 pagesControl SystemEire SimanjuntakNo ratings yet
- PID Theory From WikipediaDocument7 pagesPID Theory From Wikipediaputra-tzuNo ratings yet
- Close Loop Control Sys IntroDocument7 pagesClose Loop Control Sys IntroDwi Mulyanti DwimulyantishopNo ratings yet
- Automatic Controllers & Control ModesDocument74 pagesAutomatic Controllers & Control ModesVishal IyerNo ratings yet
- Medule 1 Lect 1Document12 pagesMedule 1 Lect 1Aram Nasih MuhammadNo ratings yet
- Control SystemDocument21 pagesControl SystemKarthik SuvarnaNo ratings yet
- CollectionDocument122 pagesCollectionankur_1984No ratings yet
- Control SystemsDocument18 pagesControl Systemsgayatri jaltareNo ratings yet
- Fundamentals of Automatic Control SystemsDocument5 pagesFundamentals of Automatic Control Systemstoony reyesNo ratings yet
- Process Control Concepts: Understanding Feedback Loops, Variables, and TerminologyDocument39 pagesProcess Control Concepts: Understanding Feedback Loops, Variables, and Terminologykaezzar10100% (1)
- PID ControllerDocument24 pagesPID ControllerAliceAlormenuNo ratings yet
- PIDControllerDocument42 pagesPIDControllerstephenNo ratings yet
- Process Control Exp 5Document4 pagesProcess Control Exp 5RickLeeNo ratings yet
- On-Off and PID Control Methods ExplainedDocument1 pageOn-Off and PID Control Methods ExplainedTristan SisonNo ratings yet
- Contro EngineeringDocument29 pagesContro EngineeringNor AshimyNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Diagnosis and Robust Control of Complex Building Central Chilling Systems for Enhanced Energy PerformanceFrom EverandDiagnosis and Robust Control of Complex Building Central Chilling Systems for Enhanced Energy PerformanceNo ratings yet
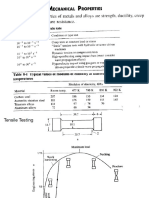
- B E MechDocument363 pagesB E MechAnonymous p8bHAAxNo ratings yet
- Electrical Actuation Systems GuideDocument40 pagesElectrical Actuation Systems GuideAnonymous p8bHAAxNo ratings yet
- Projection of Points and PlanesDocument30 pagesProjection of Points and PlanesAnonymous p8bHAAxNo ratings yet
- ED7102-Computer Applications in DesignDocument11 pagesED7102-Computer Applications in DesignLOGANTKEC100% (2)
- Ferrous MetallurgyDocument30 pagesFerrous MetallurgyGaurav KumarNo ratings yet
- Sections of Solids & Development of SurfaceDocument12 pagesSections of Solids & Development of SurfaceAnonymous p8bHAAxNo ratings yet
- Iso QBDocument2 pagesIso QBAnonymous p8bHAAxNo ratings yet
- New Picture PDFDocument1 pageNew Picture PDFAnonymous p8bHAAxNo ratings yet
- Kings: Department of Mechanical EngineeringDocument11 pagesKings: Department of Mechanical Engineeringrammit2007No ratings yet
- Line Types and Dimensioning Methods in Engineering DrawingsDocument10 pagesLine Types and Dimensioning Methods in Engineering DrawingsthamaraikkannangNo ratings yet
- Computer Aided Design: Lecture NotesDocument61 pagesComputer Aided Design: Lecture NotesbalacoeusNo ratings yet
- B.E. Mech PDFDocument113 pagesB.E. Mech PDFarulmuruguNo ratings yet
- Polymer ProcessingDocument28 pagesPolymer ProcessingMousom SomNo ratings yet
- Industrial RoboticsDocument47 pagesIndustrial Roboticspravdiv100% (2)
- Unit 4 MTCDocument118 pagesUnit 4 MTCAnonymous p8bHAAxNo ratings yet
- On Equations of Motion of Elastic Linkages by FEMDocument15 pagesOn Equations of Motion of Elastic Linkages by FEMAnonymous p8bHAAxNo ratings yet
- L 4Document42 pagesL 4Guna RajNo ratings yet
- Mn7203 Material Testing and Characterization L T P CDocument5 pagesMn7203 Material Testing and Characterization L T P CAnonymous p8bHAAxNo ratings yet
- CG Lab Manual ProgramsDocument61 pagesCG Lab Manual ProgramsVivek KvNo ratings yet
- Handout 6Document10 pagesHandout 6Anonymous p8bHAAxNo ratings yet
- Capd NotesDocument14 pagesCapd NotesAnonymous p8bHAAxNo ratings yet
- Material Science Chapter on Polymer Types, Processing & ApplicationsDocument13 pagesMaterial Science Chapter on Polymer Types, Processing & ApplicationsVaibhav ShrivastavaNo ratings yet
- Capd 2Document7 pagesCapd 2Anonymous p8bHAAxNo ratings yet
- Forms of Inventories NotesDocument3 pagesForms of Inventories NotesAnonymous p8bHAAxNo ratings yet
- Capd Imp QuesDocument2 pagesCapd Imp QuesAnonymous p8bHAAxNo ratings yet
- FEA Simulation of Metal CuttingDocument6 pagesFEA Simulation of Metal CuttingAnonymous p8bHAAxNo ratings yet
- Line AlgorithmDocument62 pagesLine AlgorithmAnonymous p8bHAAxNo ratings yet
- R013968998 PDFDocument10 pagesR013968998 PDFAnonymous p8bHAAxNo ratings yet
- PLANT LOCATION FACTORS FOR NEW ORGANIZATIONSDocument2 pagesPLANT LOCATION FACTORS FOR NEW ORGANIZATIONSAnonymous p8bHAAxNo ratings yet
- Electro-Hydraulic Equipment Price QuotationDocument6 pagesElectro-Hydraulic Equipment Price QuotationAnonymous p8bHAAxNo ratings yet
- PAG 03.1 - Determination of ResistivityDocument3 pagesPAG 03.1 - Determination of ResistivityjmsonlNo ratings yet
- Why Men Are The Submissive SexDocument8 pagesWhy Men Are The Submissive SexWilliam Bond89% (9)
- Ore Pass Design and Placement Koivisto Mikko PDFDocument105 pagesOre Pass Design and Placement Koivisto Mikko PDFasepdayat100% (1)
- Activity 13Document13 pagesActivity 13Lielannie CarasiNo ratings yet
- Dentsply Sirona Q2 Earnings Presentation - FINALDocument18 pagesDentsply Sirona Q2 Earnings Presentation - FINALmedtechyNo ratings yet
- Commonwealth scholarships to strengthen global health systemsDocument4 pagesCommonwealth scholarships to strengthen global health systemsanonymous machineNo ratings yet
- Learning CurveDocument7 pagesLearning CurveSyed FaizanNo ratings yet
- Template For Group AssignmentDocument5 pagesTemplate For Group AssignmentIntan QamariaNo ratings yet
- Kinder DLP Lesson-Exemplar-Week-25-Day-2Document16 pagesKinder DLP Lesson-Exemplar-Week-25-Day-2Leonor BagnosNo ratings yet
- Philippine Idea FileDocument64 pagesPhilippine Idea FileJerica TamayoNo ratings yet
- Einstein AnalysisDocument2 pagesEinstein AnalysisJason LiebsonNo ratings yet
- Seán Ó HEochaidhDocument3 pagesSeán Ó HEochaidhJoakamaster 16No ratings yet
- 2004 Swamee, Prabhata K. Rathie, Pushpa N. - Exact Solutions For Normal Depth ProblemDocument9 pages2004 Swamee, Prabhata K. Rathie, Pushpa N. - Exact Solutions For Normal Depth Problemjosue.angelo9459No ratings yet
- Permissions Problems - DeniedDocument5 pagesPermissions Problems - DeniedGeo KalNo ratings yet
- ABC Pre School: (Please Refer Advertisement in This Section)Document5 pagesABC Pre School: (Please Refer Advertisement in This Section)hemacrcNo ratings yet
- Arrest of Leila de Lima (Tweets)Document74 pagesArrest of Leila de Lima (Tweets)Edwin MartinezNo ratings yet
- CANON KABUSHIKI KAISHA vs. COURT OF APPEALSDocument2 pagesCANON KABUSHIKI KAISHA vs. COURT OF APPEALSJUAN REINO CABITACNo ratings yet
- Timeline of The Human SocietyDocument3 pagesTimeline of The Human SocietyAtencio Barandino JhonilNo ratings yet
- Games and Sports As Man's Cultural HeritageDocument5 pagesGames and Sports As Man's Cultural Heritagesimransabir152004No ratings yet
- Summary of Verb TensesDocument4 pagesSummary of Verb TensesRamir Y. LiamusNo ratings yet
- Sheikh Yusuf Al-Qaradawi A Moderate Voice From TheDocument14 pagesSheikh Yusuf Al-Qaradawi A Moderate Voice From ThedmpmppNo ratings yet
- Week4.pdf 82849 1 1583836882000 PDFDocument17 pagesWeek4.pdf 82849 1 1583836882000 PDFsssmmm8No ratings yet
- Wegsheider's Role Theory in Substance Abusing FamiliesDocument5 pagesWegsheider's Role Theory in Substance Abusing FamiliesLouisa KouklaNo ratings yet
- Sereno's Dissenting Opinion Re TruthCommDocument35 pagesSereno's Dissenting Opinion Re TruthCommGerald MagnoNo ratings yet
- Signals SyllabusDocument1 pageSignals SyllabusproNo ratings yet
- Comparative Summary of 5 Learning TheoriesDocument2 pagesComparative Summary of 5 Learning TheoriesMonique Gabrielle Nacianceno AalaNo ratings yet
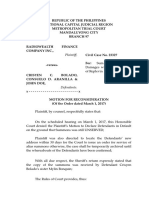
- Motion For Reconsideration (Bolado & Aranilla)Document4 pagesMotion For Reconsideration (Bolado & Aranilla)edrynejethNo ratings yet
- Assignment 1Document3 pagesAssignment 1Rabia Ahmad100% (1)
- Case 3:09 CV 01494 MODocument13 pagesCase 3:09 CV 01494 MOAnonymous HiNeTxLMNo ratings yet
- Past Perfect TenseDocument21 pagesPast Perfect TenseAliana CruzNo ratings yet