You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Nexgen Technology: Final Year Ieee Artificial Intelligent Titles 2020-2021 Artificial IntelligentDocument8 pagesNexgen Technology: Final Year Ieee Artificial Intelligent Titles 2020-2021 Artificial IntelligentPraveen KumarNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Nexgen Technology: Final Year Ieee Antenna Titles 2020-2021Document3 pagesNexgen Technology: Final Year Ieee Antenna Titles 2020-2021Praveen KumarNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Authentication and Key Agreement Based On Anonymous Identity For PeerDocument59 pagesAuthentication and Key Agreement Based On Anonymous Identity For PeerPraveen Kumar100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Design and Fabrication of An Autonomous FireDocument11 pagesDesign and Fabrication of An Autonomous FirePraveen KumarNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Ieee 2020-21 Power ElectronicsDocument4 pagesIeee 2020-21 Power ElectronicsPraveen KumarNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- GRAVITY POWER GENERATIONDocument15 pagesGRAVITY POWER GENERATIONPraveen KumarNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Ieee 2020-21 Power ElectronicsDocument4 pagesIeee 2020-21 Power ElectronicsPraveen KumarNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- 2017-18 Ieee PHP Projects TitleDocument2 pages2017-18 Ieee PHP Projects TitlePraveen KumarNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Ieee 2020-21 EmbeddedDocument19 pagesIeee 2020-21 EmbeddedPraveen KumarNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- BIGDATA 2017-18: A Parallel Multiclassification Algorithm For Big Data Using An Extreme Learning MachineDocument3 pagesBIGDATA 2017-18: A Parallel Multiclassification Algorithm For Big Data Using An Extreme Learning MachinePraveen KumarNo ratings yet
- MonicaDocument6 pagesMonicaPraveen KumarNo ratings yet
- Billing Using PythonDocument70 pagesBilling Using PythonPraveen KumarNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Crime Detection Using Data Mining IJERTV5IS010610Document6 pagesCrime Detection Using Data Mining IJERTV5IS010610Praveen KumarNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Automatic Pneumatic Bumper and Break Actuation BeforeDocument11 pagesAutomatic Pneumatic Bumper and Break Actuation BeforePraveen KumarNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Edge Intelligence: The Con Uence of Edge Computing and Artificial IntelligenceDocument25 pagesEdge Intelligence: The Con Uence of Edge Computing and Artificial IntelligencePraveen KumarNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Pneumatic Gear Shifting SystemDocument6 pagesPneumatic Gear Shifting SystemPraveen Kumar0% (1)
- Effective Solar Tracking System Maximizes Renewable EnergyDocument38 pagesEffective Solar Tracking System Maximizes Renewable EnergyPraveen KumarNo ratings yet
- Crime Detection Using Data Mining IJERTV5IS010610Document6 pagesCrime Detection Using Data Mining IJERTV5IS010610Praveen KumarNo ratings yet
- Break Pad Complete DopcuemntDocument44 pagesBreak Pad Complete DopcuemntPraveen KumarNo ratings yet
- Effects of Fibre Surface Treatment On Fracture-Mechanical Properties of Sisal-Fibre CompositeDocument2 pagesEffects of Fibre Surface Treatment On Fracture-Mechanical Properties of Sisal-Fibre CompositePraveen KumarNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Technology Can Help Your Business Grow From A SmallDocument12 pagesTechnology Can Help Your Business Grow From A SmallPraveen KumarNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Efficient Tree Structures For HighDocument7 pagesEfficient Tree Structures For HighPraveen KumarNo ratings yet
- Cynernetics Screen ShotDocument13 pagesCynernetics Screen ShotPraveen KumarNo ratings yet
- Proposed Prediction Model Deep, LearningDocument2 pagesProposed Prediction Model Deep, LearningPraveen KumarNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- (Iot) - Iot Applications and Services Cover Almost Any Sector WhereDocument22 pages(Iot) - Iot Applications and Services Cover Almost Any Sector WherePraveen KumarNo ratings yet
- Employe and ManagementDocument70 pagesEmploye and ManagementPraveen KumarNo ratings yet
- Efficient Tree Structures For HighDocument7 pagesEfficient Tree Structures For HighPraveen KumarNo ratings yet
- The Secured Power Charging Gateway Using Iot andDocument14 pagesThe Secured Power Charging Gateway Using Iot andPraveen KumarNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Robotics of Conflict Inside Multi-Partner Technology and SoftwareDocument23 pagesRobotics of Conflict Inside Multi-Partner Technology and SoftwarePraveen KumarNo ratings yet
- Long-Range Temporal Correlations and Scaling Behavior in Human Brain OscillationsDocument6 pagesLong-Range Temporal Correlations and Scaling Behavior in Human Brain OscillationsPraveen KumarNo ratings yet
- Nirs DS2500 Analyzer: ManualDocument54 pagesNirs DS2500 Analyzer: Manualedward tagarinoNo ratings yet
- At-CP1E CPU Unit SoftwareDocument450 pagesAt-CP1E CPU Unit SoftwareNikolas Kolasni Lakenir Ckerde DockosNo ratings yet
- Chapter 8 State Space AnalysisDocument22 pagesChapter 8 State Space AnalysisAli AhmadNo ratings yet
- Instructions For Continued Airworthiness Maintenance Manual Supplement Concorde Valve Regulated Lead-Acid Main BatteryDocument11 pagesInstructions For Continued Airworthiness Maintenance Manual Supplement Concorde Valve Regulated Lead-Acid Main BatteryESAVENo ratings yet
- Hager Guide To Junction Boxes PDFDocument16 pagesHager Guide To Junction Boxes PDFTTaanNo ratings yet
- Spec25051 - Teck CableDocument4 pagesSpec25051 - Teck Cablecrfg2003No ratings yet
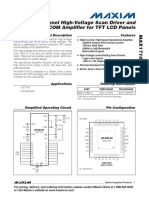
- 10-Channel High-Voltage Scan Driver and VCOM Amplifier For TFT LCD PanelsDocument10 pages10-Channel High-Voltage Scan Driver and VCOM Amplifier For TFT LCD PanelsVinicius MarcosNo ratings yet
- Jabra A120s User ManualDocument51 pagesJabra A120s User Manualapi-26157899No ratings yet
- Lesson 6 Connection of Field WindingDocument26 pagesLesson 6 Connection of Field WindingGleden Umayam33% (3)
- Vertx SeriesDocument24 pagesVertx SeriesGert Baez CuevasNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Impedance Measurement Instruments: 26.1. Introduction To Impedance MeasurementsDocument26 pagesImpedance Measurement Instruments: 26.1. Introduction To Impedance MeasurementsHeiner Farid Castillo AvellaNo ratings yet
- 300Mhz To 450Mhz Low-Power, Crystal-Based +10Dbm Ask/Fsk TransmitterDocument11 pages300Mhz To 450Mhz Low-Power, Crystal-Based +10Dbm Ask/Fsk TransmitterBlagoja GjakovskiNo ratings yet
- Roubik Gregorian-Introduction To CMOS OP-AMPs and Comparators-Wiley (1999)Document369 pagesRoubik Gregorian-Introduction To CMOS OP-AMPs and Comparators-Wiley (1999)Maanas Khurana50% (2)
- Preface For The Power SystemsDocument16 pagesPreface For The Power SystemsSaket Tirpude20% (5)
- Att.1 QT1-L-G-020-05-00003, KKS Numbering SystemDocument85 pagesAtt.1 QT1-L-G-020-05-00003, KKS Numbering SystemDoan Ngoc DucNo ratings yet
- Cat Digital Voltage Regulator Manual: Read/DownloadDocument2 pagesCat Digital Voltage Regulator Manual: Read/DownloadBrian Jr Ruiz Alegre0% (1)
- Homework 3: Phase and Timing Estimation Due November 22: EE 477 Introduction To Digital Communications Fall 2019Document2 pagesHomework 3: Phase and Timing Estimation Due November 22: EE 477 Introduction To Digital Communications Fall 2019kelvin mwanikiNo ratings yet
- GENERATOR RELAY PANEL PROTECTIONSDocument17 pagesGENERATOR RELAY PANEL PROTECTIONSsandeep11789No ratings yet
- Phy VivaDocument3 pagesPhy VivaKaran RMWNo ratings yet
- Energy Conversion: Ruben J. Dichoso InstructorDocument24 pagesEnergy Conversion: Ruben J. Dichoso InstructorCj LlemosNo ratings yet
- Zener Diode and Diode ApplicationDocument51 pagesZener Diode and Diode Applicationnibar dyllanNo ratings yet
- IJRET V/Hz control of AC induction motorDocument7 pagesIJRET V/Hz control of AC induction motoredi ediNo ratings yet
- ETH-2 For Compact/Modular 3rd Generation PSS: Operating Manual - Item No. 21140-EN-04Document72 pagesETH-2 For Compact/Modular 3rd Generation PSS: Operating Manual - Item No. 21140-EN-04RUBENNo ratings yet
- Philips+Chassis+TPM18 6LDocument90 pagesPhilips+Chassis+TPM18 6LJackson FerreiraNo ratings yet
- Resetting To The Delivery State: SIMATIC S7-300 CPU 31xC and CPU 31x: InstallationDocument2 pagesResetting To The Delivery State: SIMATIC S7-300 CPU 31xC and CPU 31x: InstallationHerry SusiloNo ratings yet
- Chapter 2 Computer EvolutionDocument28 pagesChapter 2 Computer EvolutionmillerNo ratings yet
- FDI302 FDI302 FDI302 FDI302 FDI302: Field Device InterfaceDocument2 pagesFDI302 FDI302 FDI302 FDI302 FDI302: Field Device InterfaceLuis MilanNo ratings yet
- MasterFan SF360R ARGB CoolerMaster's 360mm Addressable RGB FanDocument2 pagesMasterFan SF360R ARGB CoolerMaster's 360mm Addressable RGB FanMohd Aris IbrahimNo ratings yet
- Runyes Autoclave - Service ManualDocument21 pagesRunyes Autoclave - Service Manualvoica andreea67% (15)
- Transformer Class 12 ProjectDocument21 pagesTransformer Class 12 ProjectAbhishek Sen50% (2)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- Quantum Physics: What Everyone Needs to KnowFrom EverandQuantum Physics: What Everyone Needs to KnowRating: 4.5 out of 5 stars4.5/5 (48)
- Summary and Interpretation of Reality TransurfingFrom EverandSummary and Interpretation of Reality TransurfingRating: 5 out of 5 stars5/5 (5)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessFrom EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessRating: 4 out of 5 stars4/5 (6)