You might also like
- System DifDocument9 pagesSystem DifSameOldHatNo ratings yet
- FSMA Solve Friction Problems Student PDFDocument6 pagesFSMA Solve Friction Problems Student PDFCamille Cucio0% (1)
- Vibration Propagation of Gear Dynamics in A PDFDocument64 pagesVibration Propagation of Gear Dynamics in A PDFsunil481No ratings yet
- Mathcad Solutions To The Chemical Engineering Problem SetDocument29 pagesMathcad Solutions To The Chemical Engineering Problem SetFelipe ChicrallaNo ratings yet
- Engine Control System PDFDocument750 pagesEngine Control System PDFsunil481No ratings yet
- Class XI Mathematics BookDocument423 pagesClass XI Mathematics Booksunil481No ratings yet
- Engine Control System PDFDocument750 pagesEngine Control System PDFsunil481100% (1)
- Friction Factors PDFDocument10 pagesFriction Factors PDFsunil481No ratings yet
- FRACTURE & FATIGUE - Advanced Fracture Mechanics - O'Dowd (Notes)Document107 pagesFRACTURE & FATIGUE - Advanced Fracture Mechanics - O'Dowd (Notes)manmathk100% (1)
- Inclined StressDocument28 pagesInclined StressAli El-Gazzar100% (1)
- FRACTURE & FATIGUE - Advanced Fracture Mechanics - O'Dowd (Notes)Document107 pagesFRACTURE & FATIGUE - Advanced Fracture Mechanics - O'Dowd (Notes)manmathk100% (1)
- FRACTURE & FATIGUE - Advanced Fracture Mechanics - O'Dowd (Notes)Document107 pagesFRACTURE & FATIGUE - Advanced Fracture Mechanics - O'Dowd (Notes)manmathk100% (1)
- Pearson Gate 2016 Detailed Analysis MeDocument4 pagesPearson Gate 2016 Detailed Analysis MeILAYAPERUMAL KNo ratings yet
- Technical Art Lecture 1 by Anupam SexaneDocument26 pagesTechnical Art Lecture 1 by Anupam Sexanesunil481No ratings yet
- S Kumar PaperDocument17 pagesS Kumar Papersunil481No ratings yet
- Pearson Gate 2015 Set 3 Me SPDocument16 pagesPearson Gate 2015 Set 3 Me SPsunil481No ratings yet
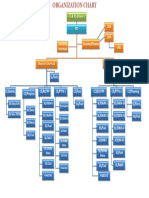
- Organisational Chart 12122014Document1 pageOrganisational Chart 12122014sunil481No ratings yet
- GKP 3 Cut Off Stategies and Psus Hiring MeDocument2 pagesGKP 3 Cut Off Stategies and Psus Hiring Mesunil481No ratings yet
- Pearson Gate 2015 Set 1 Me SPDocument18 pagesPearson Gate 2015 Set 1 Me SPsunil481No ratings yet
- Pearson Gate 2015 Set 2 Me SPDocument20 pagesPearson Gate 2015 Set 2 Me SPsunil481No ratings yet
- GKP 2014 Set 1 Me SPDocument14 pagesGKP 2014 Set 1 Me SPsunil4810% (1)
- Pearson Gate 2016 Set 1 Me SPDocument18 pagesPearson Gate 2016 Set 1 Me SPsunil481No ratings yet
- Engineering Drawing Question Bank Unit I & IIDocument15 pagesEngineering Drawing Question Bank Unit I & IISundara MoorthyNo ratings yet
- Basic Thermodynamic Concepts Like Temperature, Pressure and MoreDocument228 pagesBasic Thermodynamic Concepts Like Temperature, Pressure and MorechandankrdumkaNo ratings yet
- Tata Technologies Automotive BrochureDocument8 pagesTata Technologies Automotive Brochuresunil481No ratings yet
- Gallavotti - Elements of MechanicsDocument594 pagesGallavotti - Elements of MechanicslordnovakNo ratings yet
- Aerospace Ansys SolutionDocument44 pagesAerospace Ansys Solutionsunil481No ratings yet
- Cse-I-Elements of Civil Engg. & Engineering Mechanics (10civ-13) - NotesDocument109 pagesCse-I-Elements of Civil Engg. & Engineering Mechanics (10civ-13) - NotesPandal RajNo ratings yet
- Experimental Bullet Impact On Steel and ArmourDocument29 pagesExperimental Bullet Impact On Steel and Armoursunil481No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Cooling Fan Motor (Spin-on Element) (Square Solenoid Coil) Parts ListDocument2 pagesCooling Fan Motor (Spin-on Element) (Square Solenoid Coil) Parts ListEdgar SanchezNo ratings yet
- Antipsychotic DrugsDocument2 pagesAntipsychotic DrugsDana Mae AfanNo ratings yet
- Tac71 09Document32 pagesTac71 09TateNo ratings yet
- Chap 011 NotesDocument10 pagesChap 011 Notesfree50No ratings yet
- Bus 428Document236 pagesBus 428Emeka Ken Nwosu100% (1)
- Quality Executive resume highlighting MHA and NABH experienceDocument3 pagesQuality Executive resume highlighting MHA and NABH experiencesherrymattNo ratings yet
- Accurate breadmaker instructionsDocument32 pagesAccurate breadmaker instructionsliviugrasu_scribdNo ratings yet
- Understanding the Multidimensional SelfDocument20 pagesUnderstanding the Multidimensional SelfJuan Dela CruzNo ratings yet
- Industrial Gases and AcidsDocument5 pagesIndustrial Gases and AcidscarlNo ratings yet
- ADANI POWER LIMITED: POWERING INDIA'S GROWTH WITH A 2030 OUTLOOKDocument26 pagesADANI POWER LIMITED: POWERING INDIA'S GROWTH WITH A 2030 OUTLOOKAnonymous V4jDKjUR6No ratings yet
- Pohnpei - About Nan MadolDocument20 pagesPohnpei - About Nan MadolSándor TóthNo ratings yet
- BLDC Motor Driven Solar PV Array Fed Water Pumping System Employing Zeta ConverterDocument6 pagesBLDC Motor Driven Solar PV Array Fed Water Pumping System Employing Zeta ConverterRahul UdayanNo ratings yet
- A House of Many Mansions: The History of Lebanon ReconsideredDocument256 pagesA House of Many Mansions: The History of Lebanon ReconsideredAnıl Koca100% (2)
- Chapter 11Document3 pagesChapter 11JIMENEZ, Hans Rainer C.No ratings yet
- 13 Chapter7Document19 pages13 Chapter7Bharg KaleNo ratings yet
- CV - Sanjana DhaidwalDocument1 pageCV - Sanjana DhaidwalPayal KathiawadiNo ratings yet
- Antiviral Agents and Infection ControlDocument94 pagesAntiviral Agents and Infection ControlKimberly GeorgeNo ratings yet
- Communication Network Architecture of A Smart Grid: by Manasa Swamireddy and Koushik PuppalaDocument28 pagesCommunication Network Architecture of A Smart Grid: by Manasa Swamireddy and Koushik Puppalamanasa28112002No ratings yet
- Descriptive ParagraphDocument25 pagesDescriptive Paragraphabdishakuur272No ratings yet
- Lesson 1 Introduction To TTLDocument38 pagesLesson 1 Introduction To TTLmarie judimor gomezNo ratings yet
- 21 Day Fat Loss Nutrition Program Book PDFDocument89 pages21 Day Fat Loss Nutrition Program Book PDFJohnDNo ratings yet
- Standoblue Base Coat Colors With Use of Mix 130 Silk Silver: Working Process: Special Effect Standoblue BasecoatDocument3 pagesStandoblue Base Coat Colors With Use of Mix 130 Silk Silver: Working Process: Special Effect Standoblue BasecoatMee MeeNo ratings yet
- Karen Horney Abduls PDFDocument31 pagesKaren Horney Abduls PDFlala123No ratings yet
- Order To Cash SAP SDDocument15 pagesOrder To Cash SAP SDWanderAndradeNo ratings yet
- Lab Manual: Shree Ramchandra College of Engineering, Lonikand, Pune - 412 216Document43 pagesLab Manual: Shree Ramchandra College of Engineering, Lonikand, Pune - 412 216jatindraNo ratings yet
- Gearbox Reliability Collaborative Phase 3 Gearbox 2 Test 1Document46 pagesGearbox Reliability Collaborative Phase 3 Gearbox 2 Test 1sebastianNo ratings yet
- 05 Allama Ibn e Nujaim or Un Ki Kitab PDFDocument20 pages05 Allama Ibn e Nujaim or Un Ki Kitab PDFFk imaginaryNo ratings yet
- Master Instruments Calibration ListDocument2 pagesMaster Instruments Calibration ListUsman MazherNo ratings yet
- Infections PDFDocument29 pagesInfections PDFLoudry ElfaNo ratings yet
- Luccon PflegehinweisEDocument2 pagesLuccon PflegehinweisEDejana Lazarus Lufkin MarosNo ratings yet