Professional Documents
Culture Documents
Dc&ac Gen Motor
Uploaded by
somnabuilistOriginal Description:
Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Dc&ac Gen Motor
Uploaded by
somnabuilistCopyright:
Available Formats
CHAPTER TW E 1.
V E
DC GEN E nATOR & MOTOR THEORY
DC enerator& Motor Theory
Introduction
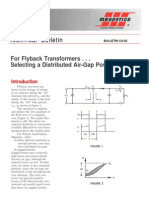
DC machines were the first electrical machines invented in the 1800's when in
1839 an elementary motor was used to drive a Locomotive in Edinburgh. Most
electric machines convert .energy by using a magnetic field that allows force to
be transmitted from a stationary to a moving part without physical connection.
There are two basic principles, which we have already discussed above,
exploited in generator and motor operation, The first, originally discovered by
the French ph ysicist Andre-Marie Amp ere, states that:
An electrical conductor caftyil1g a current at right angles to a
magnet.ic fi eld will experience a force at right angles to both the
field and the current.
The second principle, formulated on the observation s made by Michael
Faraday , states that:
A potential ditierence, or voltage, will be established between the
ends oien electrical conductor that moves across or perpendicular
to a magnetic field.
?()()6
- .
C ..
'0'0-\'>-'1 -'
These prin ciples apply for a moving conductor in a stationary magnetic field or
\..
. n\> equally for a s ta tionary-conductor wi th a moving magnetic field.
,c;'O
( o\i:"\
v
Q
Basic Generator Principles '::1
I)
';::..
g...
A generator is a machine that converts mechanical energy into electrical
by using the principle of magnetic induction. We have already gone througlf
this principle above and can be summari sed as: .
Whenever a conductor is moved within a magnetic field in such a way that e
conductor cuts across magnetic lines of flux, voltage is generated
&
fJ
&
I
c) c:s
Cupynght Barry College2002 - 2006 All rights reserved /11JJ1]J,part66.co.11k
235
CII A P Telt TW E LV E
OC G E N : R AT O R & MO T O. THE R Y
The amoun t of voltage generated depends on:
The strength of the magnetic field
The angle at which the conduct or cuts the magnetic field
The speed at which the conductor is moved
The length of the conductor within the magnetic field
The polarity of the voltage depend s on the directi on of the
magnetic lines of flux and the di rection of movement of the
conductor
To determine the directjon of the conventio nal current in a given sit uation, we
can use Fleming's right-hand rule for generators, illustrat ed in figure 12.1.
Motion of
Condu ctor
i
Figure 12.1 - Fleming' s Right-Hand Rule for Generat ors
The role is applied by using the thumb and first two finger s of the left hand,
arranged perpendicular to each other as in figure 12.1. If the thumb is poi nted
in th e directi on of conductor movement; the forefinger in the direction of
magneti c flux from north to sout h; then the middle finger points in the
direction of current flow in an external circui t to which the voltage is applied.
Note Conventional current flow is used in figure 12.1; if electron current
flow is used, it becomes the left-hand rul e, which is widely us ed in the
U SA.
236
Copyright Barry College 2002 - 2006 All right! reserved
CHA P T E R TW E L V
DC G E N E RA T O R & MO T O R T H E O R Y
A simple way of remembering which way round these rules are is that in the
UK we have the MG car, .i.e, mot or is Jeft hand and generator is right hand,
while in the USA they have GM cars.
The Simple Generator
The simplest generator is an ac generat or and basic generating prin ciples are
more easily explained by looking at thi s type first; the de gener at or will then be
discu ssed later. A simple generator, figure 12.2, consists of a wire loop
positioned so that it can rotate in a stationary magnetic field and as it does will
produce an induced emf in the loop . Sliding contacts, usually called brushes,
connec t the lo op to an external circuit l oad in order to pick up or use the
induced emf.
Pol e Pieces
Figure 12.2 - The Simple AC Generator
In fIgure 12.2 the p ole pieces provide the magneti c field and are shaped
positioned as illustrated to concentrate the magnetic field as close as
to the wire l oop . The rotating wir e is called the Armature and its ends ati"9
conne cted to rings, more correctly called Slip Rings, which rotate with tel
armature. Bru shes, usually made of carbon, ride against the slip rings and ha,;e
wires attached to them that connect to the exteroalload. Any generate d
appears across thes e brushes; this is demonstrated graphically in figure @ .3
below . tv
ro
s
,
IV
&
C)
Copyright BarryCollege 2002 - 2006 AJj n' gbtsreserved 1VIWJ.part66.co.l/k
237
CHAPTE T W E LV E
DC GE NE RA T O R a. D T O ll T HE O Y
}-----,----j '1
136 0
3 1800 1270
I
Figme 12.3 - Voltage Gen erati on
The simple genera tor illus trated in figure 12.3 above, produce s a voltage as the
armature loop rotat es in a clockwise di rection. For the" purposes of this
explanation, the ini tial or starting point is shown with the loop vertical, i.e, at
position CD, called th e 0 position. As illustr ated in figur e 12.3, at 0 the
armat ure loop is perpendicular to th e magneti c field and the loop' s red and
black conductors are moving parallel to the magnetic field.
At this point, indeed at any time the conducto rs are moving par allel t o the
magnetic fim,- no t cut any lines of flux, so no emf is induced and the
CD indicates zero. Thi s position is called the Neutral Plane.
armature loop now ro tates from position CD to <I> , i.e. 0 to 90, the
\."\)\1- con ductor s cut thr ough more and more line s of flux, at a continually increasing
angle. At 90, they are cutting through maximum flux lines and at a maximum
GO'\( angle. This results in the induced emf going from zero to ma ximum between
0 and 90.
Note that from 0 t o 90, the red conductor cuts down through the field and
at th e same time the black conductor cut s up through the field. Thi s mea ns
tha t the induced emfs in the conductors are series-adding and the resultant
voltage across the brus hes, i.e. th e t erminal voltage, is the sum of the two
induced vo ltages and th e met er at position <I> reads maximum value.
As the armature loop continues rotating from 90 t o 180, position , the
conductors that were cutting th rough a maximum of flux lines at po sition (1)
now cut through fewer lines and they are again moving parall el to the ma gnetic
field at position ) no lon ger cutting through any flux lines. As the armature
con tinues the rotation from 90 to 180, the induced voltage de creases to zero
in the same way tha t it increased duriug the rotation from 0 t o 90 and the
meter reads zero again.
238
Copy right Barry College 2002 2006 All nghls rrserved 1J1JJJIJIparl66.co.uk
CH PT E R T WE L. V E
DC, E E R A T 0 & O,T 0 R T H E 0 R Y
As the armature has rotated from 0 La 180, the conductors have been
moving through the magnetic field in the same dir ection and so the pola rity of
the ind uced voltage has remained the same, illustrated by points A to C on the
graph in figure 12.3. As the loop ro tates beyond 180 through 270, position
@, and back to the initial starting point, position (}), the direction of the
conductors' cutting reverses through the magnetic field. NO\J:} the red
conductor CtItS " i? through the field while me black conductor cuts do 1'111
through the field and as a result, the polarity of the induced voltage reverses, as
shown in figure 12.3. The terminal voltage will be the same as it was from CD to
, except that the polarity is reversed as shown by the meter deflection at
position . The vol tage output waveform for a complete revoluti on of the
loop is shown on the graph in figure 12.3.
The Simple DC Generator
Wit h the DC generator, we need to look at a single-loop genetator again, b ut
this time with each terminal connected to a section of a two-segment metal
ring. The two segments are insulated from each other, forming a Commutator
that replaces the slip rings of the ac gener ator . The commutato r mecheni celly
reverses the armature loop connections to t he external circuit and thi s occurs
at the same time that th e armature loop voltage reverses. Through this process,
known as commutation, the commutator changes the generated ac voltage to
a pul sating de voltage as shown in the graph of figur e 12.4 below.
Figure 12.4 - Results of Using a Commutator
4 2
Copydgbt Barry C o J e ! ! ~ 2002 - 2006 AI} ngbts reserued lVJJJIJJ.part66.co.Jlk
239
c tl A TER T WELVE
DC G E N E RAT R & OT O R TH E O R Y
When the armature loop rotates clockwise from CD to @, a voltage is induced
in the armature loop that causes a current in a direction that deflects the meter
to the right Current flows through loop, out of the negative brush, through
the meter and the load, and back thr ough the po sitive brush to the loop.
Vol tage reaches its maximum value at on the graph and the generated
voltaze and the current fall to zero at a>. Ar this instant, each brush makes
ci
contact with both segments of the commutator and as the armature loop
continues to rotate to position , a voltage is again induced in the loop, but is
the opposite polari ty. The volt ages induced in the two sides of the coil at are
10 the reverse directi on to thar shown at .
In this case, the curr ent is flowing from the black side to the red side in
po sition and from the f ed side to the black side at . However, because
the segments of the commutator have rotated with the loop and are contacted
by opposite brushe s, the direction of current flow through the brushes and the
meter remain s the same as at CD.
The voltage developed across the brushes is now pulsating and unidirectional,
i.e, in one direction only and varies twice during each revolution between zero
and maximum; thi s variation is called Ripple.
Obviously, for mo st applications, a pulsating voltage is inappropriate.
Therefore, in practical generators, more armatur e loops, ie. coils, and more
commutator segments are used to produce an outpu t voltage waveform with
less ripple. The effects of additional coils may be illustrated'by adding a second
coil to the armature, figure 12.5.
/Generaror Terminal Voltage
--..,---
+ B
A
,
" '\
'
.
" " ~ \
,
, ,
. .
135
0
180
0
225 270 315
D
380
0
Coil voltages
Figure 12.5 - Effect of an Additional Coil
240
Copynght Barry College 2002 - 2006 All figbts reserved IJiwwpart66.co.tlk
C; ' PTE. TW E l- V E
DC GE E R A T k MO T OR TH E O R Y
The commutator in figure 12.5 must now be divided into four (4) parts since
there are now four (4) coil ends. As the assembly rotates in a clockwi se
directi on, the voltage induced in the black coil, decreases for the next 90 of
rotation.
In other words, fr om maximum to zero and the voltage induced in the red coi l
in cre ases from zero co maximum at t he same time. Since there are four (4)
segments in the commutator, a new segment passes each brush every 90
instead of every 180. This allows the brus h to switch from the black coil to
the red coil at the instant the voltages in the two coils ate equal. The brush
remains in contact with the red coil as it s induced voltage increases to
maximum, level 'B' in the graph and then decreases to level 'A', 90 later. At
thi s point, the proce ss repeats itsel f.
The graph in figure 12.5 shows the rip ple effect of the voltage when two
ar ma ture coils are used . Since there are now four (4) segments in the
commutator and only two brushes, the voltage cannot fall any lower than at
point 'A' and therefore, the ripple is limited ro th e rise and faU between levels
'A' and 'B ' on the graph. Adding more armature coils can further reduce the
ripple effect, and decreasing ripple in this way increases the etiective voltage
of the output .
The Eiicctive voltage is the equivalent level of dc voltage that will cause the
same average curr ent flow through a given resistance. By using addi tio nal
armature coils , the voltage across the brushes is not allowed to faU to as low a
level between peaks. Practical generators use many armature coils and usually
also use more than one pair of magnetic poles. The additional magnetic poles
have the same effect on ripple , as doe s the additi onal armature coils. In
addition, th e increased number of poles provid es a stronger magnetic field, ie
greater flux lines, and thi s in tur n, allows an increase in output voltage be cause
the coils cut more lines of flux per revolution .
'20
06
""0\.:0, - ,
e f.,.
t: o\lc<f; '
--0. '-'
(Q '"
2 4 1
Gpynght Barry College 2002 - 2006 All nghtJ reserved JJnlwpart66.co.I!k
C H A P TER T ELVE
DC G EN ERA TO R & ., T O R TH E O V
El ectr om a netic Poles
Nearly all-practical generato rs use electro magnetic poles instead of the
permaDent magnets used in the simple generator illustrated above. The
electromagnetic field poles consist of coils of insul ated copper wire wound on
soft iron cores, as shown in figur e 12.6.
Figure 12.6 - Four-Pole Electromagnetic Gen erator
The main advantages of using electromagneti c pol es are that there is increased
field strength and now it can be contr olled; i.e. by varying the input voltage , the
field stre ngth can Val)'; and by varying the field strength, the output voltage of
the generato r can be controll ed.
')C)Q6
' ) C ) C ) ~ - ~
\ \ . <;r,(, ~
. (,0
1
''' <>
1
"90-......
i0-\. Commutation
:',';:$
cp"?
Comm uta tio n, as discu ssed above, is th e process by whi ch a dc voltage ou tp ut
is taken from an arm ature tha t ha s an ac voltage induced in it . As shown with
th e example of the sim ple generato r above, th e comm utator mechanically
reverses the armatu re loop connections to th e external circuit,
This occurs at the same instant that the voltage polarity in the armature loop
reverses. A DC voltage is applied to the load because the output connecti ons
are reversed as each commutat or segment passes under a brush, the segments
being insulat ed from each other.
In figure 12.7, commutation occurs simultaneously in the two coils that are
briefly short-circui ted by the brushes. Coil 'B' is short-circuited by the negative
brush while coil 'Y', the opposi te coil, is short-circuited by the positive brush.
However, th e brushe s are positioned on the commutato r so that each coil is
short-circuited as ir moves through its own electric al neutral plane, i.e. when
242
Copyright Barry CoUfge2002 - 2006 All rights reseried IJIlVWpart66.co.Jlk
CH P I; R TWE I. VE
D C GE ERA T O & Q T R THE O Y
th ere is no voltage generated in the coil, so preventing sparking between the
commutator and brush. Sparking between the brushes and commutator is an
indication of improper commutation, usually caused by imp roper bru sh
placement.
Load
Figure 12.7 - Commutat ion of a DC Gen erator
Armature Reaction
From previous chapters, you know that all current-carryi ng conductors
produce magnetic fields. The magneti c field produced by current in the
armature of a dc gcnerator affects th e flux pa ttern and distorts the main fiel d,
causing a shift in the neutral plane, which affects- commutation. Thi s change in
plane and the reaction of the magnetic field is called Armature
\ >gc'1
I
JReaction .
. CC.i>\v,"
As discussed above, for prop er commutation, the coil short-circuit ed by the
<.'-"i?\. - brushes must be in the neutral plane. If we look at the operation of a simple
Cp\!.' two-pole de gene rator, fIgur e 12.8, view 'A' shows the field poles and the m ain
magnetic field and the armature is shown in a simplified view in views 'B' and
'C' with the cross section of its coil represent ed as small circles. C6
';:}.
(JQ
::r
e-t
Copyright Ba'?J' Cot1ege 2002 - 2006 All righfJ reserved
243
CH A P T E R, TWEL V E
DC G E N E A T O R &. MO T O R TH E O Y
Old Neutral Plane New
.s-:: N eu tral
C. Plane I
.Armature
Magn etic
Field
Magne tic Fjeld
Ar mature Coil
Resulti ng From
In teraction
Figure 12.8 - Arrnature Reaction
The symbols within the circles represent arrows wi th the dot representing the
point of the arrow coming towards the front, and the cross represents the tail,
or feath ered end, going away to the back When the armature rotates
clockwise, the sides of the coil to the left will have current flowing towards the
from, as indicated by the dot and the other side of the coil will have current
flowing away. The field generated around each side of the coil is shown in view
'B' of figure this increases in strength for each wir e in the armatur e
coil, magnetic field almost perpendicular to the main field.
c o\\C
o
.
iC) there are two (2) fields, i.e. the main field, view 'N, and the field aroun d
\2;'\-'\.. .th e arma ture coil, view 'B' . View 'C' shows how the arma ture field distorts the
main field and how the neutral plane is shi fted in the direction of rotation.
Now if the brushes remain in the old neutral plane, they will be short-circui ting
coils that have voltage induced in them and so there will be arci ng between th e
brushes and commutator. To prevent thi s arcing in a prac tical generator, the
bru shes must therefor e be shifted to the new neutral plane.
However, shifting the brushes to the advanced position, i.e. th e new neutral
plane, does not complet ely solve the problems of arma ture reaction as its effect
varies with the load cur rent. Th erefor e, each time the load current varies, the
neutral plane shi fts and thi s means the brush pos ition must be changed each
time the load current varies.
In small generators, the effect s of armature reaction are reduced by ph ysically
shifting the position of the bru shes. However, thi s is not pr actical for large
generato rs and other means are used eliminate armature reacti on.
244
Copyright Barry College 2002 - 2006 Ali Tights resened IJ!WJVpart66.co.ul:
C H A P . R WE I. V' E
DC D E- M E A OR & O T O R THE RY
Compensating Windings and Interpoles
In larger generators, Compensating Windings or Interpoles ate used to
overcome armature reaction, figure 12.9.
Main
Compensating
Interpo les Fldd
Winclings
Pole
Figure 12.9 - Compensating Windings & Interpoles
Compensating winclings consi st of a series of coils embedded in slots in the
pole faces and these are connected in series with the armature. The series
connected compensating windings produce a magneti c field that .varies
directlywiili armature current Because the compensating windings are wound
to produce a field that opposes the magnetic field of the armature, they tend to
cancel the effects of the armature magnetic field. The neutral plane will
therefore remain stationary and in its original position for all values of
armature current. As a result, once the brushes have been set correctly, they do
not have to be mo ved again.
_'1Cl06
, ere:. way to reduce the effects of armature reaction is to place small
.,') (,0\\'-'"0 auxiliary poles, called Interpoles, betwe en the main field poles. These hav e a
"9';-") few turns of wire and are connected in series with the armature. They are
woun d and placed so that each one has the same magnetic polarity as the main
Cp<:;;"i pole ahead of it, in the directi on of rot ation, and the generated field then
produces th e same effect as the compensating winding. This field, in effe8'
cancels the armature reaction for all values of load current by causing a shift Ji51
the neutral plane opp osite to the shift caused by armature reacti on.
amount of shift created by the interpoles will equal the shift caused BE
armature reaction since both are a result of armature current
to
l>'
P
ft:
Generator Motor Reaction
"0
s
When a gen erator deliver s current to a load, the armature current a
magnetic force that opp oses the rotation of the armature called @ Motor
Reaction. To simplify matters again, if we take a single armature d>nductor,
figure 12.10 view eN, when it is stationary, no voltage is gener ated and no
Copynght Barry College2002 - 2006 All rights reserved JJ/JJIlI}.part66.co. uk
245
C li A P T E 'r IE LV l!
DC GE N E R A O R I!, MO T O R T H E O R Y
current flows and so no force acts on the conductor. When the conductor is
moved downwards , view 'B' figure 12.10, and the circuit is completed through
an ext ernal load , current flows through the conductor in the dir ection indicated
setting up lines of Dux around the conductor in a clockwise directio n.
j\
Field Weakened
Figure 12.10 - Motor Reaction in a Simple Gen erator
The interacti on between the conductor field and the main field of the
generator weakens the field above the conductor and strengthens the field
below the conductor. The main field consists of lines that now act like
stretched and so an upward reaction force is produced that acts
in Orl?,c2
si
t'&l>'b to the downward driving force applied to the armature
q:@cl'l\ 1!tor. If the current in the conductor increases, the reaction force
and th erefor e, mor e force must be applied to the conductor to keep it
,rif'''
M"'"
Cp'\i.
With no armature current, there is no magnetic, i.e. motor, reaction and so the
moving .
force required to turn the armature is low. As the arm ature curre nt increases,
th e reaction of each armature conductor against the rotation also increases.
The generato r' s actual force is multiplied by th e number o f conductors in th e
armature and the driving for ce required to maintain the gene rator arm ature
sp eed must be increased to Overcome the mot or reaction. The force applied to
turn the arm atur e must overcom e th e motor reaction force in all de generato rs
and th e device that provid es th e turning forc e applied to the armature is called
th e Prime Mover. The prime mover may be an electric motor, a petrol engine,
a steam turbine, or any o ther mechanical device that provides turning force.
246
Copy ngbt Barry College 2002 - 2006 All rigbtsreserved WIIJ1J)part66.co. "k
CH A l" E R TW E L V E
DC G': A T D & MO O R T H E Q Y
Armature Losses
In dc generators, as in most electrical devi ces, certain unwanted forces act to
decre-ase its efficiency . These for ces, as they affect the armatur e, are considered
as l osses and may be defined as one of three (3) type s:
1. Copper or r
2
R loss 10 th e winding
2. Eddy current loss in the core
3. Hyste resis loss
Copper Losses
There is po wer lost in the armature windi ng of a gener ator due to heat and this
is kn own as the Copper Loss. Heat is genera ted a.ny time curren t flows iri a
conduc tor and copper los s i s an I
2
R loss, i.e. P=I
2
R, which increases as current
increases. The amount of heat is also proportional t o the resistance of the
conductor , whi ch varies dire ctly with its length and inver sely with iLS cross
sectional area (csa). Copper loss is minimis ed by using large diameter wire that
can easily carry the current.
Eddy Current Loss es
The gener ator armature cor e is made fro m s oft iron , which is a conducting
material with desirable magneti c characteristics. As we already kno w, any
co nductor will have currents induced in it when it is rotated in a m agn eti c field
and th ese currents are called Eddy Currents, already discussed in previous
chapters. As with any current, th ese produce heat, whi ch is considered a loss.
The'iit\Bsrance of th e mat erial in whi ch the flow affects edd y currents,
'].\:\C)1tst '1ike any other electrical currents. As mentioned above, the resistance of
, GO\\c'{;,'" any material is inversely p roportional to it s cross-sectional area .
A. B.
Solid Laminated
Core Cor e
Figure 12.11- Eddy Currents in Different Cores
CllJ!Ynght Barry College2002 - 2006 All rights reserved WIII1v.part66.co.uk
247
C H AP T E T t' E L V E
DC ' E NER T O R & M OTO R T HE O R Y
Figure 12.11 view 'A' , shows the eddy currents induced in an armature core
that is a solid piece of soft ir on while view 'B' , shows a soft iron core of the
same size, but made up of several small pieces insulated from each othe r. This
process is called Iemination.
As illustrat ed in view 'B' , the curre nts in each piece of the laminated core are
considerably less than in the solid core because th e resistance 'of the pieces 1S
much high er, i.e. resistance is inversely proportional to cross-sectional area.
The curr ents in the indivi dual pieces of the laminated core are so small that the
sum of the individual currents is much less than the total of eddy curren ts in
the solid iron core and so eddy current losses are kept low when the core
material is made up of many thin sheets of me tal.
Laminations in a small generator armature may be as thin as 1/64 inch and are
insulated from each other by a thin coat of lacquer or, in some cases, simply
by the oxidation of the surfaces.
Oxidation is caused by cont act with the air while the laminations are being
annealed and this provides eno ugh insulation, as its value need not be high
because the induced voltages induced are ve ry small. Most generators use
armatures with laminated cores to reduce eddy curr ent losses.
Hysteresis Losses
We have already discussed Hys teresis and Hysteresis loss if). a previous chapter
and I am sure you will remember it is a heat loss caused by the magnetic
properties of the arma ture.
Wh en an armature core is in a magneti c field, the magnetic par ticles of the cor e
tend to line up with the magnetic field, but wh en the armature core is rotating,
its magnetic field keeps changing direction. The continuous movement of the
magnetic particlij)@-s t ry to . themselves with the m3.aonetic
produces,)@11ecUlar fri ction, which ill turn, produces hea t. This heat IS
to th e armarure windings causing the armature resistances to
.
",'<>'0
To compe nsate for hysteresis losses, most dc gen erator armatures use heat
treated silicon st eel laminations. After the steel ha s been formed to the proper
shape, th e laminations are heated and allowed to cool. This annealing process
reduces the hysteresis loss to a low value.
The Practical DC Generator
r..
What we have discus sed so far is the theor etical DC generator . The actual
construction and operation of a practical DC generator differs somewh at from
our simple generators and these differences include the construction of the
armature, the manner in which the armature is wound, and the method of
developing the main magnetic field.
248
Copyright Barry Co1lege 2002 - 2006 All ngbt.r reserued wlVwparl66. t:o.ul:
CU APT IIR T W E L V E
O C OENE R T O & M OTO T H !! O R
As already shown above, a generator that has only one or two armature loops
has high ripple vol tage, whi ch results in too little current to be of any practical
use. To increase the am ount of output cur rent, several loops of wire are used
and these eliminate most of the ripple.
T he loo ps of wire, usually called windings, are evenly spaced aroun d the
armat ure S0 [hat the distance between each windi ng is the same.
The com muta tor in a pr actical generator is also different as it has several
segments instead of two or four, as in our simple examples above with the
number of segments equalling the number of armature coils. The following
paragraphs describe several different methods of armature construction.
Gramme-Ring Armature
Figure 12.12 below, shows an end and composite view of a Gramme-Riag
armature where each coil is connected to two commutator segments.
Commutator
B. Compos ite View
Figure 12.12":' Gramme Ring Armature
With tills construction, one end of coil 1 goes to segment A, and its other end
goes to segment B; one end of coil 2 goes to segment C, and the other end of
coil 2 goes to segment B, et c, i.e. the rest of the calls are connected in a si.m.iQr
way in series, around the armature. To complete the series arrangement, coill
connect s to segment A and therefore, each coil is in series with every
coil. Figure 12.12 view 13 shows a composite view and illustrates graphi cally
physical relationship of the coils and commutator locations. to
.,'J
TIle windings of a Gramme-ring armature are placed on an iron ring.
disadvantage of this arrangement is that the windings located on the inner
of the iron ring cut few lines of flux and so they have little, if any, vom;;.ge
induced in them. For this reason, the Gramme-ring armature is not
&
249
Copyright Barry CofjcJ!,e 2002 - 2006 All n'ghtJ reserved u!)JllJlp art66.co.uk
C H !' T E R T WE L E
o O E ti E Il A T R & M O T O R T H E ORY
Drum-Type Armature
A drum-type armature, figur e 12.13, has the armature windings placed in slots
cut in a drum-shap ed iron core. Each winding completely surr ounds the core
so that the entir e length of the conductor cut s the main magnetic field.
Therefor e, the total voltage induced in the armature is greater than in th e
Gramme -ring and so is much more efficient. This type of armature now
accounts for the majority of modern DC generators.
Slots
Winding
Laminated Core
Figure 12.13 - Drum-Type Armature
Drum-type armatures are wound with either of two types of windings , Lap or
Wave winding, depending on how th eir wires are connected to the armature.
WitJ1 lap windings the two ends of anyone coil are taken to adjacent segments,
whereas in wave windi ngs, the two ends of each coil are bent in opposite
to segments some distance apart .
.c':l\ c'f:,c
winding illustrated in figure 12.14 view A, is used in de generato rs
. '9'0- designed for high-current applications. The windings are connected to provide
several parallel path s for current in the armature and for this reason, lap-
GO';:;; wound armatures require several p airs of poles and brushes.
Figure 12.14 view B shows a wave winding tha t is us ed in dc generators
designed for high-voltage app lications . Notice that the two ends of each coil
are conn ected to commutator segments separated by th e distance between
poles. T his configuration allows th e series addi tion of th e voltages in all th e
windings between brushes . T his type of windi ng only requi res one pair of
brushes, bu t in p ractice, a practical generator may have several pairs to improve
commutation.
250
Copyright Barry Co/lege2002 - 2006 A/I nj,htJ reserved W1J/lJ1.part66.co.uk
C H AP.TE R T E L V :
DC GEN E R A T OR & M O T O R T H l; O Y
Po sition of
Fi eld Poles Armature
Commutator
(A) Lap Winding
Commu tator
Segmen ts
(B) Wave Winding
Figure 12.14- Lap & Wave windings on Drum-Type Arm atures
Lap windings have as many paths in parallel between the negative and positi ve
brushes as th ere are poles. For instance, wi th an eigh t (8)-pole Jap winding, the
armature conductors for m eight (8) parallel parts between the negative and
positive brushes.
With a wave winding on the other hand has only two (2) paths in parallel,
irrespective of the num ber of poles. Therefo re, i f a machine has 'P' pairs of
poles:
of paths with a lap winding =2P
00
7-
_ 2:
c oWoc;c ; Numb er of paths with a wave winding = 2
iD
.if''''
Cy \;.<'<' Field Excitation
When a dc voltage is appli ed to the field windings of a dc generator, currenr
flows through the windings and sets up a steady magnetic field. This is
Field Excitation. This excitation voltage can be produced by the gene t atg;'
itself or it can be supplied by an outside source, such as a battery.
6J
A gen erat or tha t supplies its own field excitat ion is called a Self-Excitefj
Generator, but is only possible if the field pole pieces have retained a sligh\:
amo unt of permanent magneti sm, called Residual Magnetism. When
generator starts rotating, the weak residual magnetism generates a small voh1P-ge
in the armature. This small voltage applied to the field coils causes a
curre nt , Alth ough small, this field current str engthens the magnetic fiolB and
allows the armature to generate a higher voltage, which then field
strength, etc. Tills pr ocess continues until the output volt-age rhes the
generator' s rated output.
251
Copynght Barry College 2002 . 2006 All ngbtJreseroed lplJI1},.part66.co.llk
C H A I'"tE R T WE L V E
D C G E l E A TO & ~ O OR T tE O R Y
Generator Classification
Self- excited generators are classed according to the type of field connectio n
they use and there are three gene ral type s:
Seri es wound
Shunt wound
e Compound wound
Compound wound generators are further classified as cumulative compound
and di fferential compound but are not di scussed in this chapter.
Series Wound Generator
In the series wound generator, figure 12.1 5, the field windings are connected in
series with the armature. Current that flows in the armature flows through the
external load circuit and thr ough the field windings.
,
r- . F- l d ~
,") enes ~ e (>
0.....--
T? L ~ d _ Generator
Circuit Outp ut
0---,
Figure 12.15- Series-Wound Generator
The series-wound generator uses very low r esistance field coil s, which consist
of a few turns of large diameter "Tire. The voltage output inc reases as the load
circuit starts drawing mot e current and under low-load current condi ti ons, the
current flowing in the load and through the generator is small. Since small
current means that the field poles set up a small magnetic field, only a small
vol tage is induced in the armature. If the resi stance of the load decreases, by
Ohm's Law, the load current increases and more current flows through the
field. This increases th e magnetic field and increase s the output voltage.
Therefore, a series woun d dc generator's characteri stic is that the outp ut
voltage varies with load current. This is undesirable in most applications , and
so this type of generator is rarely used in practice.
252
Copyright Barry CoUege2002 - 2006 All rigbtsreserved wIVWpart66.ro.uk
C H P T E R TW E L VE
DC GENERATOR & //lO T O tD O R Y
Shunt Wound Generator
In a shun t-wound generator, figure 12,16, the field coils consist of many turns
of small wire that are connected in parallel with the load, In other words, they
ar e connected across the output voltage of the arma ture,
0
I
Sh,,",!
Generator
Armature
field
Outpu t
0
Figure 12,16 - Shunt-Wound Generator
Current in the field windings of a shunt-wound generator is independent of the
load current. Since the field curr en t, and therefore field str ength, is no t affected
by load current, the output voltage remains nearly constant unlike the ou tput
voltage of the series-wo und generator, In practical use, the ou tput voltage in a
de shunt wound generator varies inversely as load current varies, ie the ou tput
voltage de creases as load current increases because the voltage drop acros s the
armature resistance increases.
Compound 'Wound Generators
')()Q6
c overcome the disadvantages of series and shunt wound generators,
1 co\\c
lB
compound wound generators have a series field winding in additi on to a shunt
field winding, as shown in figure 12.17,
. ,j5i
,=
(,0\; )
J
Shunt t
E
0..---
Generator
Output
Arrna ture
Figure 12.17- Compound Wound Generator
Capynghl Eo'!)' Colkge2002 2006 A ll n'gh/s reserved WJV1JJ,port66. co,lIk
253
CH A ER T W E L VE
DC GE NE ATO R s O T R TH E O R Y
With the compound wound generator, the shunt and series windings are
wound on the same pole pieces and when load cur rent increases, the armature
voltage decr eases just as in t he shunt wound generator. This causes th e voltage
applied to the shunt field winding to decrease, which results in a decrease in
the magnetic field. This same increase in load curr ent, since it fl ows through
the series winding, causes an increase in the magnetic field produce d by that
wi nding.
Now by proportioning the two fields so that the decrease in the shunt field is
just compensated by the increase in the series field, the output voltage remains
constant.
This is illustr ated in figur e 12.18, which shows the voltage characteristics of the
series, shunt and compound wound generators.
~
.B
J3
~
...,
B- "
o Load Current
Shun tWoWld
:::l
E-
;::J
Load Current
, - - - - - - - - - - ' = ~ = ' _ ' = = ' - - - - _ ___'
Series Wound
Load Current
Compo und Wound
Figure 12.18 - Voltage Characteristics of Generators
A s you can see, by proportioning t he effects of the two fields, series and shunt,
a compound-wo und generator provides a cons tant output voltage under
varying load conditions. However, actual curves are seldom, if ever, as perfect
as shown in figure 12.18.
254
Copy right Bal7J' Callege 2002 - 2006 Ail rightr reserved lW7W.part66.co. uk
C i A P T ER T EL VE
DC GEN E R A T OR If. M O T OR T lt E O Y
Generator Constr uction
As with all machines, the de generator can be broken down int o several
component partS, figure 12.19.
Arrnaru..re
Field Windings on Pole Face
Magnetic Circuit of
A2-Pole Generat or
Armature Coils
Armature
Adjustment for
Spring Tension
Risers
Plgtail
""--=' ./ Spring fo r
/\ ., --"''- Brush
Pressure
Adjustment
Slo ts for
for <y' Ring
Coil Leads Brush
\
Copper Segme nt s
Brush Holder
Typical Brush and Holde r
Figure 12.19 - Components of a DC Gen erator
c;;
Figure 12.20 shows a cutaway drawing of the generator with the
parts installed, illustrating the physical relation ship of the component s to eae-1&
to
1'0
n
o'
It:
9ij
&
rf?
255
Copyright Baf!)' Colfegf. 2002 2006 All ngh!f re.rerved IJ/1HF.part66. co. uk
CI1 ;\ P T -R T i EL V E
DC G H E RA 0 l & M T O R H ORY
Suppressor
Box
Field
Tcrrrunal
Connecting
Link
Ter min al
Bloc k
Air
Oil
Seal
Commuter End
Fram e Cover
Comm uter
nave
End
En d
Armature
Frame
Frame
Figure 12.20 - Cutaway of a DC Generator
Voltage Regulation
Regulation of a generator refers to the voltage change that takes place as the
load changes. It is usually expressed as the change in voltage from a no-load
conditi on to a full-load condition, and is expressed as a per centage of full-load
using the following formula:
E J-Efl
Percent age of Regulation =: n x 100
E
]
. Co\\e
o
c is the generator's no-load termin al vo ltage and Err- its full-load E
nL
.dF'\. . terminal voltage. For example, to calculate the p ercent of regulation of a
Cp'Y,,<""'" generato r 'With a no- load voltage of 462 volts and a full-load vo ltage of 440
volts:
Percentage of Regulation :::: 462 - 440 x 100
440
Percentage of Regulati on =: 5%
In practical terms, the lower the p ercent of regulatio n, th e better the generator.
In the above example, the 5% regulation represented a 22-volt change from no
load to full load, whereas a 1% change would repre sent a change of 4.4 volts,
which, of course, would be better still.
256
Copyrigbt Barry C-O /lege 2002 . 2006 All rights reserved u'J>/Jvpart66.co.J{ k
" P T lO lt T E L V E
DC GENERATOR & /lO T o n TH E R Y
Voltag e Control
Voltage control is either manual or automatic and in mo st cases, the process
involve s changing the resistance of the field circuit to con trol the field curren t.
Cont rolling the field curr ent in this way allows control of the output voltage.
The major difference between l':1e various voltage control systems is merely rhe
method by whic h the field circuit resistance and the curr ent are controlled.
N ote: Voltage Regulatiol1 sho uld not be confused with Vol tage Control
although in many techni cal manuals they are talked about as one and the same.
As cUscussed above, voltage regulation is an internal action occurring within
the generator whenever the load changes, wh ereas voltage control is an
imposed action, usually through an external adjustment, for the purpose of
increasing or decr easing ter minal voltage.
Manual Voltage Control
The han d-operated field rheostat, shown in figur e 12.21, is a typical example of
manual voltage control. The field rheostat is connected in series with the shu nt
field circuit, which provides the simplest metho d of controlling the terminal
vol tage of a DC generator.
t;l
""0
...-:
""'
c+
6l
b:J
r:;
Figure 12.21- Simple Hand-Operated Field Rheostat
p
This type of field rheostat contains tapped resistor s with leads to a +
terminal switch . The switch ann may be rotated to make contact
various resistor taps and thi s vari es the amount of resistance in the field ,#cuit.
Rotating the arm in the direction of the Lower arr ow, i.e, counter-clockwise,
increases the resi stance and lowers the output voltage; while ann in
the Raise direction decreases the resistance and increases the output voltage.
257
Copyright Barry College 2002 2006 All rightJreserved wwwpart66.co.uk
CH T E R TW E L V E
D C G 14 E R A T O R & MO T 0 R T Ii E Y
Most generator field rhe ostats use resistors of alloy wire as they have a high
specific resistance and a low temp eratur e coefficient . These alloys includ e
copper, ni ckel, manganese, and chromium and they are often marked under
trade names such as Nichrome, Advance , Manganin, etc.
Auto mat ic Voltaire Contr ol
<..}
Automatic voltage control is used where load current vanauons exceed the
built-in ability of the generator to regulate itself It achieves this by sensilJg
changes in output voltage causing a change in field resistance to keep the
output voltage constant.
Basic Motor Principles
The dc motor is a m echenical -aotuivxtze that can be used in many different
ways. Many large pieces of equipment depend on a de motor for their power to
move as tbe speed and direc tion of rotation of a DC motor is easily controlled.
nus makes it especially useful, for operating equipment, such as winches,
cranes, actuators, etc that must move in di fferent di rections and at varying
speeds.
A de motor's operation i s based on the same prin ciple as the generator, ie that
a current-carrying conductor placed in a magneric field, perpendicular to the
lines o f flux, tends to move in a direction perpendicular to th e magnetic lines
of flux. There is a definite rel ationship between the direction of the magn etic
field, the direction of current in the co nductor, and the di rection in which the
conductor t end s to move, which is hest explained by using Flem iog's l eft
h and r ule for m otors, as illustra ted in figure 12.22, using conven tional
current flow.
Flux
,.-----v
)
Figure 12.22 - Fleming's Left-Hand Rule for Motors
258
Copyright Barry College 2002 - 2006 All right! reserved wwJJl.part66.co. uk
-
C H P T E fl T W ELVE
DC GENER A TOR & M O 't O R T H E O R Y
To find the direction of motion of a conductor, using this method, extend the
r:
~ .
thumb, forefinger, and middle finger of the right hand so they are at right
angles to each other, as illustrared in figure 12.22. If the forefinger is pointed in
the direction of magnetic flux, i.e. north to south, and the middl e finger is
pointed in the dir ection of current flow in the conductor, the thumb will point
in the dire ction the conduc tor will move,
Put simply, a dc mo tor rotate s to produce mechanical energy because of two
magnetic field s interacting with each other. The armature of a de motor acts
like an electromagnet when current Bows through it s calls and since the
armature is located within th e magnetic field of the field poles, these two
)
, magn etic fields interact.
L
f . ~
Now we know from earlier chapters and the discussions concerning generators
above that like !lliI.oonetic poles repel and unlike magnetic poles attract. The dc
..
motor has field poles that are stationa ry and an armatu re that turns on b.earings
in the space between tile field poles.
The armatur e of a de mot or has windings on it just like the armature of a de
generato r and these are also connected to commutator segments. A de motor
consi sts of the same components as a de generator and in fact, m ost dc
generato ts can be made to acr as mo tors, and vi ce versa.
To explain the de motor principle, let us star t-off again by looking at a simple
D C motor, figure 12.23.
Figure 12.23 - Simple DC Motor
e
t;;:J
s
;,0
p
~
This simple motor has two field poles, one a north and one a south pole,'ind
the magnetic line s of force extend across the opening between the poles &rth
to south. ISS
,
&
C)':3
Copyright Batr)' Coi1ege 2002 2006 All rightsreserved
2 5 9
lJ/JJJ]J'.parl66. co.uk
! ... .
-,., { ".
CHA P E R T W EL V E
DC G EN E R A TOR & MOTOR TII O R Y
The armature in this simple de motor is a single loop of wire, just as in the
simple armature we discussed at the beginning of this chapt er on DC
generators. However, in this case, the loop of wire has current flowing thr ough
it from an external source, which produces a magnetic field, indicated by the
dot ted line through the loops.
The loop, i.e, armature, field 15 both attracted and repelled by the field from the
permanent magnetic poles. Since the current thro ugh t he loop goes around in
the direction of the arrows, the north pole of the armature is at the upper left,
and the south pole of the armature is at the lower right, as shown i n figure
12.23 view (1) and of course, as the loop turn s, these magnetic poles turn with
it.
Now, as shown in the illustrations, as the loop rotates, the north armatur e pole
is repelled from the north Reidp ole and attrac ted to the right by the so uth
iield p ole.
Likewise, the south armature pole is repelled from the south field pole and is
attracted t o th e left by the nort h field pole. This action causes the armature to
tum in a clockwise direction, as illustrated in figur e 12.23 view (2).
After the loop has turned far enough so that it s north pole is exactly op pos ite
the south field pole, the brushes advance to the next segments, G.'1anging the
direction of current flow through the armature loop and chang.ing the polarity
of the arma ture field, as shown in figure 12.23 view (3). The process now
repeats itself as long as the current flows and the magne tic fields again repel
and attract each other, causing the armat ure to turn continuously.
In this illustration of a simple motor , the moment um of the rotating armature
carries it past the position where the unlike pol es are exactly lined up.
However, if these fields are exaetly lined up wh en the armature current is
initially turned 900there is no mo mentum to start the armature moving and in
thi s would not rotate. In order to star t the motor ro tating in
it woul d be necessary to give it a mechani cal spin, but in reality,
pro blem does not exist when there are mor e t urns on the armature as
<0
:,c<\."'\. there is more than one armatur e field.
>'i....
( ,0'<
Counter Emf
While a DC motor is running, it acts somewhat like a de generator as there is a
magnetic field from the field poles, and a loop of wire is turning and cutting
thi s magnetic field. For the moment , disregard the fact that there is current
flowing through the loop of wire from the external source. As the loop sides
cut the magnetic field, a voltage is induced in them, the same as it was in the
loop sides of the de generator and this induced voltage causes current to flow
in the loop.
260
Copyright Bany College 2002 - 2006 A ll rights reserved lJJWwpart66.&0 .t/k
C lIJ\ P T I! R TW E L V E
or: G E N "E R T O R 8. M O O R T H E O Y
l
"
;;
. ;
. \
,'i
'\0'05
\; \.\<Bv-.
Cp"< '
)
1
I
Now, consider the relative direction between this current and the current that
causes the mot or to tun, Applying the left-hand rule for generators, disc ussed
abo ve, we can see tha t the direction of current flow caused by the gen erator
acti on is in the direction opposite to that of the battery current. Since thi s
,gcnerator-actioll vol ta ge is opposite that of the power source, it is called a
'CO U J)tN emf ' or back emf.
However, this is a bit ove rsimplified, as you may already suspect and in reality,
only one current flows. Because the counter emf can never become as large as
the applied voltage, and because they are of opposite polarity, the counter emf
effectively canc els part of the armature voltage. The single curr ent that flows is
armature cur rent, but it is greatl y reduced be cause of the counter emf.
A counter emf Is always devel op ed in a dc motor, but It canno t be equal to or
great er than the applied bat tery voltage; as if it were, the mot or would not run,
However, the counter emf opposes the applied voltage e.nough to keep the
armature current from the bat tery to a fairly low value . If there were no such
thing as counter emf, mo re curr ent would flow through the armature, and the
motor wo uld run much faster. Unfor tuna tely, there is no way of avoiding
counter emf and so is cat ered for in the motor design.
Motor Loads
Motor s are used to turn mechanical device s, such as water pump s, gr inding
wheels, fan blades, and circular saws . 'W'hen a mot or is turning a water pump,
the water pump is the load, i.e. the water pump is the mechanical devi ce that
the mo tor must move. Sorry to labour the point but this really is the definiti on
of a motor load. As with electrical loads, the mechanical load connected to a
R 91{Jf6tor affects many electri cal quantiti es; e.g. power consumption , amount
t,c.?S)Cirf curr ent., speed, efficiency, etc, are all the se are partially controlled by the size
of the load. The physical and electrical characteristics of the mot or must be
matched to the requirement s of the load if the work is to be done without of
damage to either the load or the mot or.
Pr actical DC Motors
5)
As discussed above, D C mot ors are electrically identical to DC generato rs
in fact, the same DC machine may be driven mechani cally to generateji
voltage, or it may be driven electri cally to move a mechanical load. While thisnJ;
not nonnallv done, it does point out th e simil arities between the two mac],,;,.g. .
, . .'Ot?"
<Do
In practice, mot or s and gener ators are usually used as dedicat ed
their similariti es will become eviden r below, as we discuss the series, shuili, and
compound types of motor, &1..>
C)
Copynght Barry ColJege 2002 - 2006 AlIllghtsreserved JJJJ1Jwp(}d 66. co.uk
261
C HA PT E 'r W, L V E
C G E tt E AT O R & MOTOR TH ORY
Series DC Motor
In a series DC motor, the field is connected in series with the armature and is
wound with a few turns of large wire, because it must carry full arma ture
current, figure 12.24 .
Series Field (.
Input
Voltage
Of--......, "
Arma ture \ )
__ J)
Figure 12.24 - Series-Wound DC Motor
Till s type of motor develop s a very large amount of turning force, called
Torque, from a standstill and so can be used to operate small electric
appliances, portable electric tools, cranes, winches, hoists, and the like. Its
speed varies widely between no-l oad and full-load conditions and so canno t be
used where a relatively constant speed is required under varying lo ad
condi tion s.
The wide speed cha racteristic is a major disadva ntage of the series motor as it
can con tinu1, wi th no load connected to it , to th e point of
,
this happens, usually the bearings are damaged or the windings fly out of
.the slots in the armature; a danger to both equipment and personnel, especially
Cp,,?'\ in the aircraft environment. Therefore, with a seri es motor, there must always
be some load connected before it is turned on .
Shunt Motor
A shunt motor is connected in the same way as a shunt generator, figure 12.25,
i.e, the field windings are connected in parallel, i.e. shunt, with the armature
windi ngs.
262
Copyright Barry Coikge 2002 - 2006 All rights resened WWIlJpart66.co./lk
CHAP T E n T E L V E
DC GE N I!RATOR & 0 0 Ttl E O Y
Input Shunt
Armatur e (' l
Voltage Field \ /
"
Figure 12.25- Shunt Wound DC Motor
\Vith a DC shunt motor is adj ust ed , its speed remains relatively constant even
under changing load conditions 2.S the .field flux also remains constant. A
cons tant voltage acro ss the field makes the field independent of variations in
the armature circuit and if the motor load increases, it tends t o slow down,
which causes the counter emf generated in the armature to decrease. Thi s then
causes a corr esponding decrease in the oppo sition to power sou.rce current
flow through the armat ure and the armature curre nt incre ases, causing the
motor to speed up. The starting conditions are re-e stablished, and the origi nal
speed i s maintained. Conversely, if the mot ot load is decreased, it t ends to
incr ease speed; counter emf increases, armatu.re current decreases, and t he
speed decreases.
In each case, all of this happens so rapidly that any actual change in speed is
slight there is instantaneous tendency to change rather than a large
in speed.
_
""
- ,'0
. \;\
Compound Motor
cP'? .
A compound motor has two field windings , ugu.re 12.26; one is a shunt
connected in p arallel with th e armature; the other a series field connected .i9
series. ca.
'"'
With the compoun d wound motor, the shunt field gives the constant speed])
advant age of a regular shunt motor, while the series field gives it the
of being able to develop a large torque when first started under a heavy load. .;j
[}
tc::
&
,
!J
(\;
&
OJ
Copy nght Bat?), College2002 2006 All rights reseried _part66.cl>.uk
263
C.H A I' E T WE l. V E
DC G E N E ATO ll & MOT O R TH E O Y
]
Inp ut
Voltage
Input
Series
Voltage
Shun t
Field (
Field "
Long
>
-,
Field
Shun t
Field
Short
1. Long shunt
2. Short shunt
Figure 12.26 - Compound-Wound DC M otor
\X.'hen the shunt field is connected in parallel wi th the series field and arma ture ,
it is called a long shunt; Bgure 12.26 view (1 ), and when lust in parallel with
the armature, a short shunt, figure 12.26 view (2).
Types of Armatures
. As with dc genera tor s, dc mo tors can be const ructed using one of two types o f
armatures. I have included a brief review of the Gramme-ring and drum
wound armatures here to emphasise the similarities between de generators and
de motors. (\') _20
0b
2\Jv,,"
"\CO
e
co\: '"
iO,;}'\.'i'l J
Grarrune-Ring Armature
The Gr amme-ring armature is cons tructed by "Winding an insulated wire around
a soft-iron ring, figure 12.27. Eight (8) equally spaced connections are made to
the winding and each of the se is connected to a commutator segm ent, but the
brushes touch only th e top and bottom segments.
264
Copyr:"gbt Barry Colkge2002 - 2006 AJi right! reserved wflIwparl66.co.u k
C II AP T R T W E L'V C
C G E t I! nAT R & 0 T O R E 0 R Y
Brushes
Figure 12.27 - Gramme Ring Armature
J
, ;
v-
There are two parallel paths for curr ent to follow, using electron current flow,
from the negative side of the battery; one up the left side and one up the righ t
side. Thes e paths are completed through the top brush back to the battery's
positive lead,
We can check the direction of rotation of this armature by using the righ t-hand
rule for motors i.e, holding the thumb, forefinger, and middle finger at right
angles.
If the forefinger is in the directi on of field flux; in thi s case, from left to rigbt
then turning the wrist so that the middle finger points in the directi on th at the
curr ent flows in the winding on the outside of the ring, the thumb points in the
directi0G: the winding will move. Note that curr ent flows into the page in the
windings and out of the page in the right-hand windings,
0;:' '].;
0" o'\l.e:t;>
The Gramme-ring armature is seldom used in modern de motor s a s the
. ,"?>'i-'i- ,
\Q Y
windings on the inside of the ring are shielded from magnetic flux, whi ch
i\'''v
causes thi s type of armature to be inefficient. However, I have discussed it h ere
(,0'<\'
primarily to help you better understand the drum-wound armature.
Drum-Wound Armature
The drum-wound armature is generally used in ac motors and is identical to t.l:tf1
drum wincling discus sed in the chapter on de generator s. ,$
s
If the drum-wound armatur e was cut in half, an end view at the cut wg,jiid
resemble the drawing in figure 12.28, view 'A', while view 'B' is a side of
the armature and pole pieces. &
:
'l
.J
!
Oipy nght Bony College2002 - 2006 All rights reseroed www.parl66.co.uk
265
C H APTE R T 'I EL ti
DC G ll N E k 'f O R & MOT -o n THEO RY
A. End view B. Side view
Commutators
Figure 12.28 - Drum-Type Armature
Notice that the length of each conductor is positioned parallel to the faces of
the pol e pieces and so each cond uctor can cut the maximum flux of the motor
field. The inefficiency of th e Gramme-ring armature is ove rcome by
positio ning the conducto rs 10 this way.
The direction of curre nt flow is marked in each conductor in figure 12.28 view
'A' as though th e armature were turni ng in a magnetic field. The dot s show
that current is flowing towards you on the left side, and the cro sses show that
it is flowi ng away from you on the right side . Strips of insulation are inserted in
the slots to keep windings in place when the armature spin s, shown as wedges
in figure 12.28.
of Rotation
.
:-<>'1. The direction of rotation of a dc mo tor depe nd s o n th e dire ction of the
. mi\:,onetic field and th e dir ection of c.uaent flow in the arm ature. If eithe r is
lJ reversed, the r o tati on of the motor will reve rse, but If bo th are reversed at the
same time , the m oto r will con tinue rotating in th e same direction. In pra ctice,
th e field excitatio n voltage is reversed in order to reverse motor dir ection.
Ordinarily, a motor is set up to do a parti cular job tha t requires a fixed
dir ection of rotati on, but there are rimes when it is necessary to ch.ange the
direction of rotation, such as a drive mot or for an aircraft's control sur face,
which must be able to move in both dir ections.
266
Cupyright Barry College 2002 - 2 006 A)/ right, 1)I'JIJfJJp art66.co.11k
C A P T E R T W F. L V E
D C li E N RA O R & O T O R. T lI E O R Y
Motor Speed
A mot or whose speed can be controlled is called a variable-speed motor; whi ch
is what de rootors ar e. The speed of a de m otor is altered by changing the
current in the field or by changing th e current in the armature,
\}(inen the field current is dec reas ed, the field flux is reduced, and the counter
emf de creases, allowing more ar mature curren t , and so the mot or speeds up.
When the field curr ent is increased, the field flux is increased, caus ing an
increase in counter emf, which opposes the armature current, and th e armature
cur rent decr eas es, and slows the motor down.
Rhe ost at
Input
Termi nals
0>----,
Shunt Armature
Fiel d
Long
Figure 12.29 - Controlling Motor Speed
-
GoW/'b
c
t: When the voltage applied to the armature is decreased, th e armature current is
decreased , and the motor again slows down. When the armature voltage and
. ,\\C current are bo th increased, the mo tor spe eds up.
-,.\'C'
In a shunt mot or, a rheostat, connected in series with the field windings,
usually controls the speed, as shown in figur e 12.29. W'hen the resistance o f t{le
rheostat is incr eased, the curre nt through the field winding is decreased and t%
decreased flux momentarily decreases the cou nter emf and the motor
speeds up with the increase in co unter emf keeping the armature curre n t thg"
same. In a similar way, a decrease in rheostat resistance increases the
flow through the field wi.ndings and caus es the mot or to slow down. if
In a series motor, the rheostat spee d con trol may be connect ed either &1
parallel or in series with the armat ure windings. In either case,
rheostat in a direction that lowers th e voltage acro ss the armature the
curr ent through the armature and slows the motor and the opposite
motor speed.
&
:1
Cj
Copynght Barry CoJ/.ege2002 - 2006 AI! Tight! reseried wlJ!w.part66.co.uk
11
267
C I A P T E R T W E L VE
DC GENERA T OR s: MOTOR T lI Eo H V
Armature Reaction
The reasons for armature reaction and the methods of compensati ng for its
effec ts are basically the same for de motors as for dc generators. Figur e 12.30
reiterates for you the distorting effect that rhe armature field has on the flux
betw een the pole pieces. Notice, however, that the effect has sr..fted th e
neutral pl ane backward, agains t the direction of rotation, This is differen t from
a DC generator , whe re the neutral plane shifted forwa rd in the dir ection of
rotation.
Neutral plane Armature
Figure 12.30 - Armature Re ac tion
As before, the brushes mu st be shifted to the new neutral plane, but in this
case counter-clockwise and again, the proper location is reached when th ere is
no sparking from th e brus hes.
')00
6
';;'indings interpoles, as above, .canc el armature
de motors. Shifting brushes reduces sparking, but It also makes the
((;1 less effective and cancelling annature reacti on eliminates the need to shift
'\..-'.:j
brushes in the first place.
GO"'? '
Com pens ating windings and interpoles are as imp ortant in mot or s as they are
in genera tors. However, compensating winding s ar e relatively exp en sive and so
most large dc m ot or s depend on interp oJes t o corre ct arm ature reacti on.
Compensating winding s are the same in motor s as they are in gener ator s, but
interp oles, however , arc sligh tly diffeten t. The difference is that in a gene ra to r
th e interpole has th e same polari ty as the main pole shesd of it in th e directi on
of rotation. In a moto r the interpol e has th e same polari ty as th e main pole
[allowing it.
The int erpole coil in a mot or is connec ted so as to carry the armature current
the same as in a generator. As the load varies, the inrerpole flux vari es, and
commutation is automatically correct ed as the load changes so eliminating the
need to shift the brushes when there .is an increase or decrease in load.
Therefor e, in a practical mot or, the brushes are located on the no-load neutral
plane and they remain in that posicion for all conditions of load.
268
Copyright Barry CoUege 2002 - 2006 All rights reserved www.part66.co.uk
C UA P T E SEVENTEEN
C GENERATORS
; \:
.,
j.
I
I
l
\
I
I
AC Generators
Introduction
Mos t of the electrical power used in modern, large transport aircraft, as well as
in do mestic applications , is Alternating Current (AC or ac}. As a result, the
AC Gen erator is the most important means of producing electrical power,
They are generally cailed Alternators and vary in size depe ndi ng upon the
power load requirement . The typical aircraft ac system generates a sine wave
of a given voltage, typically 115 V and 26 V, and in mos t case, of a cons tant
frequency. The majori ty of aircraft that use ac as the primary power source use
a 3-phase system, i.e, the generator produc es three (3) sine waves that are at
120
0
with respect to each other. Many of the terms and principles covered in
thi s chapter sho uld be familiar to you from earlier chapters as they -are the
same as those covered in the chap ter on de generators . However , before we
\'
\
go on any further, we need to revisit 3-phase ac to look at how practical
\
systems are con nected.
3-Phase Revisited
In an earlier cha pter we touched on the concept of 3-phase ac by looking at the
between single ac and 3-phas e ac voltages. This figure is reproduced
, Co\\e'?:,c here as figure 17.1 for convenience's sake.
y
.
' . . ,0<:( '
.....-.iCC
, . . .... 1....
,
Time
.1
b-b c-c
I I I ,
t z t) t4 ts
1 Cycle
a-a
T UDe
Figure 17.1- Single Versus 3-Phase AC
357
CIljJ)'rigbt B017)' College 2002 - 2006 A ll ngh!; rneroed MY1J},part6&.co.uk
. i C HAPTE R SE V N T E E N
,
A C
As shown in figure 17.1, the three (3) waveforms are identical in shape and can
be used to provide three separate outputs.
There are two (2) ways of connecting the three output windings of a 3-phase
alternator.
Star or 'Y' wound
Delta wound
Star or 'Y' 3-Phas e AC Alternator
With this type of alternator, each of the thr ee windings are connected toget.her
at a common or neutr al point as illustr ated in figure 17.2 below:
B
c
Q02- 2
00D
.Figure 17.2 - Star or 'Y' Wound Alt ernator
. v
;\.<;1'(\."- As shown in figure 17.2, the other three ends of the windi ngs are brough t ou t.
.
as its output leads, each of which is now acros s two of the windings in series.
However, the output voltage will n ever be twice that of one windings as the
voltages are at 120
0
with respect to each other. It will instead be 1.73 times t hat
of the single winding.
Aircraft alternators produ ce 115 V ac from each winding at a frequency o f
400Hz. Therefore, the outpu t across outputs A to B or B to C i s
approximately 199 V ac.
Since the windings are in series between two of the output leads, the output
current is the same as rhe phase curren t.
Note. For the remainder of these notes, I will refer to the above type of
alterna tor as a 'Star wound alterna tor.
358
COPJrighl Barry 2002 - 2006 A l l rightsreserved !)IIV1JJp art66 .co.Ilk s ... _ _ _ _ ___ _ _ _ _ _
CHAP E n SEV e N TEEN
A C G E ,N Ii' It A T O R S
Delta W01Uld Alternator
With the Delta wound alternator, both ends of each winding can be connected
to the ends of the other windings to form a Delta connection, This name is
derived from the resembl ance of the coil assembly to the Greek letter t.., as
shown in figure 17.3 below,
A
B
: I
C
Figure 17.3 - Del,ta Connected 3-Phase Alternator
With thi s cons truction, an output lead is brought from each junction so that 'i 1
the output volt age will always be th e same as the phase voltage. As shown in
figure 17.3, there are two coils in series across or in parallel with each of the
phase windings, Since the curr ent in each of the windings is 120
0
out of ph ase
in the other windi ngs, the output currenr is also 1.73 times that of the
C'c in the phase winding.
GO'l;-,.c 'O
'9\,s 'i-'1
,
;;: .
AC Versus DC Advantages
g
The main advantage of ac over de is that it operates at a higher
typically 115 V ac versus 28 V de, The use of a higher voltage is not
an advantage in it self as higher voltage, by its very natur e, requir es bettee;
standards of insulation. However, it has a distinct advantage when looking a:t:1
large amounts of power as rugher voltage does mean lower currents.
lower the current, the lower the I
2R
losses and the lower voltage drop, ihl
addition, as conductor size is directly proportional to current flow,
reduction in current of an AC system means a significant weight saving a
tv
corresponding DC system. &'
"U
&
r
C) c:5
359
Co/!)'right Bany College 2002 2006 All n' gbts reserved nitl'P),parl66.co, IIk
C HAP T E R se v E N T E E N
AC GENERAT O S
Basic AC Generators
Regardless of she, all electrical generato rs, whether dc or ac, depend upon the
pri nciple of magnetic induction. An emf is induced in a coil as a result of:
A coil cutting th roug I ", magneti c field
II> A magne tic field cutting through a coil
As lon g as there is relative motion between a conductor and a magnetic field, a
voltage will be induced in the conductor. That part of a gen erato r that
produces the magnetic field is called the field and that part in which the
voltage is ind uced is called the arm ature. For relative motion to take place
be tween the conductor and th e magnetic field, all gene rators must have two
mechanical parts, a rotor and a stator . The r ot or is the part that ro tates; th e
stator is the part that remains stationary. In a de generator, the armature is
always th e rotor, bue with alrernat ots, the armature may be either the rotor or
stato r.
Rotating-Annature Alternators
The rotating-armature alternator is similar in construction to the dc generator
in t hat tile armature rotates in a stationary magnetic field as shown in figure
17.4.
Field Excitation
r----- - - --II!I!I-- - - - ---
Armature
AC Output AC Output
Figure 17.4 - Simple Rotating Armature Alternator
360
Crpyright Barry College 2002 - 2006 A ll ri ghtI reserved lJ/lVIJI.par166.J.llk
CHAPTER SE V E N T E E N
AC GE U ERATO S,
In the DC generator, th e emf generated in the armature windings is converted
fro m ac to de by mea ns of th e commutator. In th e alternator, the generated ac
is brought to the load unchanged by using slip ring s.
The rotating arma ture is onl y found in alternators of low power rating an d
generally is not used to supply electric power in large quantities
A major disadvantage of a rot ating armature it that it requir es slip rings and
brushes ro cond uct th e current from the armature to the load. The armature,
brushes, and slip rings are difficul t to insulate, and ere-overs and short
circuits can result at high voltages. For tills reason, high- voltage alternator s are
usually of the rotating-field type . .
Rotating-Field Alternators
T he rotating -field alt ernator has a stationary armeture wiJ;lding and a
rotating-field winding as shown in figur e 17.5.
AC Output
A rmature
Field Excitation
(I
Figure 17.5 - Simple Rotating Fi eld Alternator
'?
d[
'-'
rt
6l
The advantage of having a stationary armature winding is that the generater
voltage can be connected directly to the load and since 'the voltage applied -to
the rotating field is low voltage de, the problem of high voltage arc-over at #
slip rings does not exist. rB
('j
0,)
The stationary armature, or s tator, of tills alternator type holds the
that are cut by the rotating magnetic field. The voltage generatei,; in the
armature as a result of tills cutting action is the ac power that will to
the load. The stators of all rot ating-fi eld alternators are basically the same.
361
Copyright Barry College 2002 -2006 All righl! reserved
' I .t :.
\I 1,:
1 ; r :
CHAPTE e V E N TEEN
4 1. '.'
\
' I' I AC GEN E R A T O R S
I ii !:
I;!, ! ,
i F: i :
i . I ,
! 'i.
The stator con sists of a Ieminated iron core with the armature winding s
, !
,
embedded in thi s core, as shown in figure 17. 6; which is secur ed to th e stator
"
frame,
"
,'\
1: .
Stator
Assem bly
; I
1 1
Figure 17.6 - Stationary Armature Windings
I
", ,
'"
: !
Practical Alt ernators
The alterna tor s described so far in this chapter are elementary or simple in
nature; they aI"Zoe'0ldom used except as examples to aid in und erstandi ng
practical, ftl!J@t-n-ators. The remainder of this chap ter will relate th e principles of
alterna tor to the alternators actually in use in the civilian aircra ft
'\)'(.<;.11t dus try, The following paragraphs in this chap ter will introduce such concep ts
. i}"'\- as prime movers, field excitation, ar mature charact eristics and Limitations,
single-phase and polyphas e alternators, controls, regulation, and parallel
op eration .
Functions of Alternator Components
A typical rotating- field ac generator consists of an alternator and a smaller de
generator built into a single unit. The out put of the alternator section supplies
alternating voltage to the load . The only purpo se for the de exciter generator is
to supply the direct curren t required to maintain the alternator field, This dc
generator is referred to as the E xciter. A typical alterna tor is shown in the top
of figure 17,7; while the bo ttom view of this figure, is a simplified schema tic of
the generator circuit.
362
Copyright Barry College 2002 . 2006 A ll rights resened wtvWparl66.co.lJk
G H A P TE e V r: U TC
AC E H E R AT D R
Exciter -->......:
Ourpur
Comrnufil ca(Q;'
Exciter
Control
Tcrm iual
Communicator
and Slip Ring
Section
AC Field Windings (Rotor)
Generat or
Section
Figure 17,7 - Typical AC Generat or
In orde r -to make things easier to follow in the ensuing explanation, I have
expanded the schematic section, for examp le, the bo ttom view of figure 17.7
next in figure 17.8.
Exciter
Field AC Power
Output Terminals
generator
@
CJ
r:;
s
::::::
Figur e 17.8 - Alternat or Schematic
off
()
The excit er is a dc, shunt-wound, self-excited generator and the
field (2) creat es an area of intense magnetic flux between its poles. the
exciter armature (3) is rotated in the exciter-field flux, voltage is indu@ in the
exciter arma ture windings. The output from the exciter commutato r (4) is
connect ed through brushes and slip rings (5) to the alternator field. Since this
E xciter
armature
Exciter Co n trol
Terminals
2
E xciter
Alternature Ar mature
Windings (3-phase)
CukJ--right toBarry 2002 "2006 A ll rights reserved n=.part66,({).IIk,
363
CHAPTER SEVENTEEN
AC GENERATORS
is direct current already conve rted by th e exciter commut ator, the curr ent
always flows in one dir ection thr ough the alterna tor fieJd (6). Therefore, a
fixed-polarity magnetic field is maintained at all times in the alternator field
windings . When the alternator field is rotated, its magnetic flux is passed
through and across the alternator armature windings (J).
In some alternators, the exciter is supplied directly off the aircraft' s batteries
but as this can drag the battery voltage down considerably, is only used for
smaller alrernarors.
The armature is wound for a three -phase outpu t, which will be covered later in
this chapter. However, you sho uld remember as I have pointed out several
times before, a voltage i s induced in a conductor ifit is stationary and a
magnetic field is passed across the conductor, the sam e as i[th e field i s
stationary and the conductor is moved The alternating volt age in the ac
generator armature windings is conneeted through fixed termi nal s to the ac
load.
Prime Movers
.A.ll generators, large and small, ac and de, require a source of mechanical
power to turn their rotors; thi s source of mechanical energy is called a Prime
Mover. In an aircraft environ ment, this is obviously the aircraft' s engines or its
.APU. The prime mover plays an important part in th e design of alternators
since the speed at whi ch the rot or is turn ed determi nes certain chara cteristics
of alternator constructi on and operation.
')C\06
aCl'1 - '"
ae ];
Rotors
y
;'f':5><" There are two tvpes of rotor s used in ro tating-field alternators.
v J
The turbine-driven Rotor
Salient-po le rotors
Figure 17.9 shows the construction of these two rotors.
364
Copynght Barry CoUege2002 - 2006 A/I ngbts reserved www.parl66.co.llk
CH A P E R SE V e NTEEN
AC G E NE R TORS
i
Salient
Pole
Rotor
Lines of ----+
Magnetic
Flux
Turbi ne
Rot or
Driven
Figure 17.9 -Typical Rot or Constructi on
As you may have guessed, the turbine-driven rot or shown in figure 17.9, is
used when the pri me mover is a high-speed turbine. The windi ngs in the
turbine-driven rot or are arranged to form two or four distinct poles. The
windings are firmly embedded in slots to withs tand the tremendous centrifugal
forces encountered at high speeds.
The salient-pole rotor shown in figure 17.9, is used in low-speed alternators
and often consists of several separat ely wound pole pieces, bolted to the frame
of the roror.
_'1()06
we .could compa.re, the physical size the two tyPes of rotors with the same
('1 Co elect rical characte ristics, we would see that the salient-pole rotor would have a
greater diameter. At the same number of revol utions per minute, it has a
greater centri fugal force than the turbine-driven rotor. To reduce this force to
a safe level so that the windings will not be thrown out of the machine, the
salient pole is used in low-speed designs, usually with a Constant SpeedDdff
(CSD) uni t to keep the speed cons tant. .
.
Alternator Characteristics and Limitations <OJ
b:i
. f=1
Alternators are rated according to the voltage they are designed to produ ce
the maximum current they are capable of provi ding. The maximum current we
alternator can supply depends upon the maximum heating loss that caw9;e
sustained in the armature. This heating loss, (I"R power loss), acts to
cond uctors, and if excessive, destroys the insulation. Therefor e, are
rat ed in terms of this current and the voltage output, (the alternator) is65ated in
Volt-Amperes (VA) , or more typically for large aircraft kilo
(kVA).
Copyright Burry CoIJege 2002 - 2006 All rigbts ruerved u/}J!lJJ.parl66.co.:lk
365
CH A PTE R
Ae G E N E RA O R S
Whe n an alterna tor is fitted to an aircraft, it is already destined to do a specific
task. The speed at which it is designed to rotate, the voltage it will produce, the
current limits, and other operating characteristics are already built in. Thi s
information is usually stamped on a nameplate on the case so that the end-user
knows its limitations.
Single-Phase Alternators
A generatot that produc es a single, continuously alternating voltage is known
as a Single-Phase alternator. All of the alternators that have been discussed so
far fit this definition: The stator, (armature, windings) are conne cted in series.
(ill
+
Figure 17.10- Single-Phase Alternator
The individual voltages, therefore, add to ptod uce a single-phase ac vohage.
Figure 17.10 basic alternator with its single-phase outpu t voltage.
-
of phase in this context is not the same as discussing different
being in-phase or with each other . In this context, the
. d""\\"- . word phase mean s voltage as lD single voltage.
-;\'0 ' v
Single-phase al ternators are found in smaller ac aircraft and they are most often
used when the loads being driven are relatively light. The reason for this will
become apparent as we get into multiphase alternators, also caUed
polyphase alternators,
Power that is used in some aircraft, the home, shops and to operate portable
tools and small appliances is single-phase power. Single-phase power
alternators always generate single-phase poweL However, all single-ph ase
power does not necessarily come from single-phase alternators . This will sound
more reasonable as we get into the next subjects.
366
CllJ!Yrigbt Barry College 2002 - 2006 A ll rights reserved ni W1J1.part66.co.flk
C H P T E S E V E lj T E E N
A . G E NE R A 0 . R 5
Two-Phase Alternators
Two phase implies two voltages if we now apply our new definition of phase
and yes, it is that simple. A two-phase alternator is designed to produee two
completely separate voltages. Each voltage, by itself, mav be considered as a
single-phase voltage and each is generated completely independent of the
other. Figure 17.11 shows a simplified two-pole, t wo-phase alternat or.
S
N
_ .J
\ \
\ \
\ \
\ ....
\ -,
.... ....
-,
A
B
Figure 17.11- Simple Two-Phase Alternator
Note that the windings of th e two phases are physically at right angles, i.e. 90,
to each other and so perhaps as you would expect, the outputs of each phase
are 90 apart. The graph in figure 17.11 shows the two phases to be 90 apart,
with A leading B. Note that by using the original definition of phase, we can
say that A and B are 90 out of phase and by design, this will always be
case between the phases of a two-phase alternator.
. c,c
p.
The stator in figure 17.11 consists of two single-pha se windings completeri'
separated from each other. Each winding is fro. de up of two windings that arty
connected in series so that their voltages add. The rotot is identical to that useff
in the single-phase alternator.
p
In the left-hand schematic of figure 17.11, the rotor poles are opposite
windings of pha se A. Therefore, the voltage induced in pha se A is maxirRJlm,
and the voltage induced in phase B is at zero. As the rotor continues
counter-clockwise, it moves away from the A windings and approach&,s the B
windings. As a result, the voltage induced in phase A its
maximum value, and the voltage indu ced in phase B incr eases from zero.
Copyright Barry College2002 2006 All rights reserved wWIP.part66.,o.Jlk
367
. ' ,'
CHA P ' E n S E V E NTEEN
AC GE N E RA T O RS
In th e right-hand schematic, the rot or poles are opposite the windings of phase
B and now the voltage induced in ph ase B is maximum, whereas the voltage
induced in phase A has dropped to zero.
Notice that a 90 rotation of the rotor corr esponds to one-quarter of a cycle,
or 90 electri cally. The waveform picture of figur e 17.11 shows the voltag-: 0
induced in phase A and B for one cycle, which is 90 our of phase, and are
independent of each other. Each output is a single-phase voltage} just as if
the other did not exist
The obvi ous advantage, so far, is that there are two separate output voltages
and there is some saving in having one set of bearings, one rot or, one housing,
and so on, t o do the work of two. However, there is the disadvantage of
having twice as many stator coils, which require a larger and more compl ex
stator. The schemati c in figure 17.12 shows four separate wires bro ught out
from the A and B stator windings; the same as in figure 17.11.
N
..... _ _ e_
, \ ,
, \ I
B
\ \ S I I
, I I
'\, A- ",. / /
-, ", ""
,
.... - - .- -
/
Two-phase:
Three-wire
Figure 17.12 - Connection> of a 2-Phase, 3-Wi re Alternator
Notice, however , that the dot ted wire now connects one end of B1 to one end
of A2 . The ef fect of making this connection is to pr ovide a new OUIput
voltage, which is a sine-wave voltage, show n as C in figure 17.12. It is larger
than either A or B and is the result of adding the instantaneous values of phase
A and phase B. Par this reason it appears exactly half way between A and B
and so must lag A by 45 and lead B by 45, as shown in the small vector
diagr am.
Now if we look at the smaller schematic diagram in ftgure 17.12, only three
connections have been brought out from the stator. Electric ally, this is the
same as the large diagram above it. Now instead of being connected at the
output terminals, the Bl-A2 connection is made internally during man ufacture.
A two-phase alternator connected in thi s manner is called a two-phase, three
wire alternat or.
368
Copyrigbt Barry College2002 - 2006 All nghtJ resened jJW1J,Ipar/66.co.lIk
-------- - _ _ --- ' ""._..-.
C H A P T ER S E V ENT E E N
A C O E N E A T O R S
Thi s three-wire connection makes it possible ro have three clifferent load
connections, A and B across each phase, and C across both phases. The output
at C is always 1.414 time s, i.e. the voltage of either phase. These multiple
outputs are addi tional advant ages of the two- phase alternator over the single
phase.
Hopefully, now you can see why single-phase power does nor elways come
from single-phase alternators.
The two-phase alternator discussed abo ve is seldom seen in practical aircraft
use, but the operation of polyphase alternators is more easily explained using
two phases than three phases. The three-phase alternator, which will be
covered next, is by far the most common of all alterna tors in use on today' s
modern aircraft.
The Three-Phase Alternator
The three-phase alterna tor, as the name implies, has three single-phas e
windings spaced such that the vol tage induced in anyone phase is displaced by
120
0
fro m the other two. A schematic diagram of a three-phase stator showing
all the coils becomes complex, and it is clifficult to see what is actually
happening. The simplified schematic of figure 17.13, view A, shows ail the
windings of each phase lumped together as one windingwit h the rotor omitted
for simplicity.
')\:FJ7..
Th ree-phase
. (p Alternator
.,
"Q'?J.\.> :
;-v"
Figure 17.13 .. Three-Phas e Alt ern ator Connections
Cp"<.
c;;
The voltage waveforms generated across each phase ate shown on the graph
figure 17.13, phase-displaced 120
0
from each other. The three-phase alterna tJ&
as shown in this schema tic made up of thr ee single-phase altern.ators whos\D
generated voltages are out or phase by 120. The thr ee phases are independenj
of each other. '..$
n
Rather than having six leads coming out of the thr ee-phase alternator , me sa@e
leads from each phase may be connected together to form a Star, i.e;;jY,
connection, as shown in figur e 17.14. &
,
t&
&
OjG
369
Copy rigbt Barry College 2002 - 2006 A ll right! reserved IllWlJi.part66.C!i.uk
C HA P T E R S E V E N T E E
A C A T O S
Three-phase Three-ph ase
Star Connection Delta Connection
Figure 17.14 - Star & Delt a Wound Alternator Schematics
As already discussed earlier, with tills arrangement, the neutral connection is
brought out to a terminal when a single-phase load is supplied and single-phase
vol tage is available from neutr al to A, neutral to B, and neutral to C.
In a thr ee-phase, Y-connected alternator, the total voltage, or line voltage,
across any two of the thr ee line leads is the vector sum of the individual phase
Each line voltage is 1.73 times one of the phase voltages. Because the
windi ngs for m only one path for cur rent flow between phases, the line and
phase currents are the same. A three-phase stato r can also be connected so
tha t the phases are connected end- to-end; it is now delt a conn ected, as also
shown in figure 17.14. Reme mber in the delta connection, line voltages are
equal to phase voltages, but each line current is equal to 1.73 times the phase
current.
The output frequency of alternator voltage depends upon the speed of rotation
of the rotor and the numb er of poles. The faster the speed, the higher the
frequency and the more poles there are on the rotor, also the higher the
frequency is for a given speed. When a rotor has rotated thr ough an angle such
that twO adjacent rotor poles, i.e. a north and a south pole, have passed one
winding, the voltage induced in that winding will have varied through one
complete cycle. For a given frequency, typically 400 Hz in an aircraft, the more
pairs of pol es there are, the lower the speed of rotation . This principle is
illustrated in figure 17.15.
370
Copyn'gh/ Barry College 2002 - 2006 A ll right! reserved IJJlJJWparl66.&0. uk
!'
C H A P ,. !: SEV E EEN
A. c , j E N Q R,S
Both alternators are rotating at 120 RPM: F = NP
/"\ 120
(lJ
'I
\tftP
n I
I 1 \ I'
)
\J
f j l I
I
I I I I J
I I I 1
1 I I 1
'- . ' .I
0
0
180
0
360
0
0
0
180
0
360
0
8-pole low speed 2-pole low speed
Figure 17.15 - Frequency Regulati on
As sho wn in figure 17, 15, a two-pole generator must rotate at four times the
spe ed of an eight-pole generator to produce the same frequency of generated
voltage. The frequency of any ac generator in hertz (Hz) is related to the
number of poles the speed of rotation, as expressed by the equation:
Frequency = NP
120
'2.()06
P is the number of poles
\ \ n <':C
.
N is the speed of rotation in rpm
v
. \.
120 is a constant to allow for the conversion of minutes to seconds and
from poles to pair s of poles
Cd
'"C
cJQ '
However, some aircraft alternators do not require a fixed frequency, eg tha sg
used for windscreen heating, and so where this is provided it is the aireraeP'
engine's speed that influences the frequency. ff
n
s
tP
(];
I\J
I\)
85
&
,
0,<:::3
371
Copyright Bt117J College2002 - 2006 All rightJ rmTVed
C H A 'P T E S E V E N T EE N
A C GE N E A T O S
Voltage egulation
As we have seen before, whe n the load on a generator is changed, the termi nal
voltage varies with the amo unt of variation dependent on the design of the
generator.
The voltage rcguiation of an alternator I S the change of vol tage from full load
to no load, expressed as a percentage of full-load volts, whe n the speed and de
field current are held constant; given by the following formula:
E -E
% of Regulation = X 100
Ej7
Remember, the lower the percentage of regulation, the bett er it is 10 most
applications,
Pri nciples of AC Voltage Control
In an alternator, an alternating voltage is induced in the armature windi ngs
when magnetic fields of alternating polarity are passed across these windings,
The amount of voltage induced in the windings depends mainly on three
things:
The number of conductors in series per windin g
ar which the magnetic field cut s the winding
..
c The strength 0 f the magneti c field
Cp"\. Any of the se thr ee factors coul d be used ro control the amount of voltage
induced in the alternator windings.
The number of windings, of course, is fixed when th e alternator is
manufactur ed and in addi tion, the output frequency is required to be a
constant value of 400 Hz and so the speed of the rotating field mu st be held
constant. This prevents the us e of the altemator rpm as a m eans of
controlling the voltage output,
The refore, the only practical method of voltage control is to manage the
strengt h of the rotating magne tic field, Tills is achieved by Cha.11ging the
amount of current flowing through the field coil, accomplished by varying the
amounr of voltage applied across the field coil
372
Copyrigbt Barry College2002 - 2006 All ngbtJ reserved VJJJlJJJ.pdlt66.co,JJ k
CHAP t SE V E N T EEN
A , G E ~ E. R A" T 0, ~ < 5
Permanent Magnetic Generator (PMG)
With larger types of rated output generator s, a separate generator, know as a
Permanent Magnet Generator (FMC) .is mounted on the common shaft. he
advantage of using a pmg is that it s output is used for the excitation current
and also the system' s protection circuits. Figure 17.16 shows a schematic
cliagr am of a brushless AC generator fitted with a permanent magnet generator.
Armature Sh:ltt
Main
Generator
I'ield
! Excitor
Arrnarure
Excitor Field ~
Di fferen tial Pro tection
Currem Transfor mers
Main
T 6 Generator
.;>---+-!--!--j---'I:=:f----.... S
u tor
T 5 o-- --t--l- -\:= i--- - - - -J"VY)
T4 &- -bod- - - - -- --,
T3
T2
T 1
6
Permanent Magner
G ener ator Stator
Permanent
Magnet
Generator
Magnet
Figure 17.16 - Bru shlcss AC Generator 'with PMG
Tne PMG consists of a multi salient pole rotor ~ i t h ~ t s own thre: phase outp8t
windings on the stator. The output frequency 1S higher than tne generatoRif
output frequency because of the number of salient poles. ~
Differential pr ot ection current transformers are built into the generator, whiclt
on
5)
monitor the current flowing through the output windin gs as well as the loait'
, current. .}j
p
s
&
'lJ
t&
~
~
OJ
Copyright Btmy CoJlego2002 2006 All rightsreserved JJ!W)J'} arl66.(O,lIk
373
C H A P T E E I G II :E N
AC MO l' O R S
C Motors
Introduction
Most of the power-generating systems on modern aircraft produce AC; indeed
even primary DC aircraft usually require an element of AC for reference and
other values. For this reason a majority of the motor s used t hrougho ut the
aircraft are designed to operate on AC. However, there are other advantages in
th e use of ac motor s besides the wide availability of AC power. In general, AC
mot or s cost less than de motors and some types of AC motor s do not use
brushes and commutators. This eliminat es many prob lems of maint enance,
wear, etc and also eliminates the problem of dangerous sparking.
An ac motor is par ticularly well suite d for constant-speed applications as its
spee d is det ermined by the frequency of the ac voltage applied to the mo tor
terminals. Obviously th en, the D C motor is better suited for uses that require
variable-speeds. However, an AC motor can also be made with variable spe ed
characteristics but only within certain limits.
Industry builds ac mo tors in different sizes, shapes , and ratings for many
different appli cations and these are designed for use with either polyphase or
single-phase power systems. It is not possible here to cover all aspects of AC
W90>Wand so we will only look at those that apply to aviation, which cover
\ o C '2S
JCJ
tl1e principles of the most commonl y used types.
co\\c,::;
....;
_ '0.'0-).\'
cg y In thi s chapter, ac motor s are divided into Series , Synchronous and
. .;-0"
In duction mot ors, we will also discus s single-phase, and polyphase motors.
.<'\. \''0
Synch ronous mot ors, for purposes of this chapter, may be considered as
polyphase mo tors, of constant speed, who se rotor s are energised wit h D]:
>-D
,... .
O-
Induction motors, single-phase or polypha se, whose rotors are energised bfj
induction, are the most commonl y used ac motor. The series ac motor, in it;
sense, is a familiar type of motor as it is similar to the DC motor covered inJ
previous chapter. ()
o
Iff::
'
&
r&
,
C'i
Copyright Ba,-ry College 2002 - 2006 All rights reserved /J/IJJ/V.part66.co.uk
379
CHAPTER EI G H T E E N
AC MOTORS
Series AC Motor
A series ac mo tor is the same e1ectrically as a D C series mo tor, figure 18.1.
- - . -
SERIES
.. ; '-/"
ARM.
Field Coil
Armature
Armature
+
Figure 18.1 - Series AC Motor
Looking at figure 18.1, if we use the righr-iJand rule for the polarity of coils
we can see that the instantaneous magnetic polarities of the armature and field
oppose each other, and motor action results ,
As this is a series arrangement, if the current is reversed by swapping the
polarity of the the field magnetic polarity still opposes the arma ture
magnetif '}5:b'11iity because the reversal affects both the armature and the field.
wi th an AC input it causes these reversal s to take place
1J?>'\.
f '
cbntinuously and the mot or moves.
K>"
Th e construction of the ac series motor differs slightly from the dc series
motor as special metals, lami nations, and windings are used to reduce losses
caused by eddy currents, hysteresis, and high reactance. DC power ean be used
to drive an ac series mot or efficiently, but the opposite is not tru e.
The characteristics of a series ac motor are similar to those of a series dc motor
and it is a varying-speed machine. It has low speeds for large loads and high
speeds for light loads and the starting tor que is very high. Series motors are
used for driving fans, electric drills, and ot her small appliances.
380
Copyright Barry Col1ege 2002 - 2006 A Urightr reserved JVlJlwpart66.co.lik
CHAPTE R E I G H T E E ~
. A C M OT O R S
Rotating Magnetic Fields
TIle principle of rotating magneti c fields is the key to the operatio n of most ac
mot or s as synchronous and induction types rely on rotating magnetic fields in
their stators to cause their rotors 1.0 turn. TIlt'; idea is simple. A magnetic field
in a stato r can be made to rota te electrically, aroun d and around. Another
magnetic field in the rotor can be made to chase it by being att racted and
repelled by the stator Geld. Because the rotor is free to turn, it follows the
rotating magnetic field in the stator.
Rotating magneti c fields may be set up in two-phase or three-phase machines.
To establish a rotating magnetic field in a mot or stator, the number o f pole
pairs must be the same as, or a multipl e of, the number of phases in the
applied voltage. The poles must then be displaced from each other by an angle
equal to the phase angle between the individual phases of the applied voltage.
TwoPhase Rotating Magnetic Field
A rotating magnetic field is probably most easily seen in a two-phase stato r and
the stator of a two-phase induction motor is made up of two windings, or a
multiple of two. They are placed at right angles to each other around the s tato r
as illustrated in the simplified drawing in figur e 18.2, which shows a two-phase
stat or.
1
a
t
Phase
1-lA
~
0. - - - _.-- J.:o D /
1A V
.......... Phase-ss- 2
2A " A
U).-2
Figure 18.2 - Two-Phase Motor Stator
Copyright Barry GJllegc2002 - 2006 All rights reserved IVJVWparl66.co.uk
381
C i A P T E R E I G H T E E N
A ' r TO ft S
--;
If the voltages applied to phases 1 to 1A and 2 to 2A are 90 out of phase, the
currents tha t flow in the phases are displaced from each other by 90. Since the
magnetic fields generated in the coils are in phase with their respective
current s, the magnetic fields are also 90 out of phase with each other. These
two out-of-phase magnetic fields, whose coil axes are at right angles to each
other, add together at every instant during their cycle, ie they produce a
resultant field that rot ates one revolution for each cycle of AC. To analyse the
rotating magnetic field in a two-phase stator , figure '18.3, we need to look at a
graph of it s input voltage against time.
<,
45
0
135" laO
o
225
0
270
0
. 315
0
./
360
0
<,
/ /
<,
......
2 3 5
6......._ __
7 ___/
9
Figur e 18.3 - T wo-Phase Rot ating Field
The rotating arrow in the figure above repr esents the rotor. For each point set
up on the consider that CUrrent flows in a direction that will
cause polarity indicated at each pole piece. Not e that from one
the next, the polarities are from one pole to the next a
'O,..'l:dockwise way. C?ne complete cycle of lflput voltage produces a 360 rotation
:,u'\\"- of the pole polarities.
<1>''''
0
0
'\ '
The wavefo rms in figure 18.3 are of the two inp ut phases, displaced 90,
because of the way they were generated in a two-phase alterna tor. The
waveforms are numbered to mat ch their associated phase. Although not
shown in this figure, the windings for the poles 1 to 1A and 2 to 2..A.. would be
as shown in the previous figure. At position 1, the current flow and magnetic
field in winding 1 to 1A is at maximum because the phase voltage is maximum
while the current flow and magnetic field in winding 2 to 2A is zero because
the phase voltage is zero. The resultant magnetic field is therefore in the
direction of the 1 to l A axis.
At the 45 point, i.e, pos ition 2, the resultant magnetic field lies mi dway
between windings 1 to l A and 2 to 2A and the coil currents and magnetic
fields are equal in strength . At 90, i.e. position 3, the magneti c field in winding
1 to l A is zer o while the magnetic field in winding 2 to 2A is at maximum.
382
Capynght Barry College 2002 2006 A ll rights resmed WlJJ)JJpart66. co. I{k
CH A P TE R
A C O T O n S
Now the resultant magnetic field lies along the axis of the 2 to 2A winding as
sho wn and ha s rotated clockwise through 90 to get from position 1 to
position 3. When the two-phase vo ltages have completed one full cycle, i.e.
posi tion 9, the resultant magnetic field has rotated through 360. Therefor e, by
placing two windings at right angles t o each other and exciting these windings
with voltages 90 out of phase, a rotating magnetic field results.
Two-phase moto rs are rarely used except in special-purpose equipment, bur
they are discussed h ere to aid in understanding r otating fields, Yo u will,
h owever., encounter many single-phase and three-phase motors.
Three-Phase Rotating Fields
The thr ee-phase induction moto r also operates on the principle of a rotating
magnetic field and figure 18.4 below shows the individual windings for each
phase and how the thr ee phases are tied together in a ey' or Star wo und stator.
Phase1
Phase 3 0
Figure 18.4 - Three-phase, Y or Star Wound Stator
C6
>-::5
The do t in each diagram indi cates the common point of the Star- connection . i;i.
(J'1
;T
As shown in this figure, the individual phase windings are equally
around the stator, i.e. at 120'1 apart.
The three-phase in put voltage to the sta tor of figure 18.4 is shown in the
in figure 18. 5.
W
&
&
,
t&
Copyright BarryCollege2002 - 2006 All rights reserted WlJ'Jll.part66.co. J(k
383
CH A F' TER E I H T E E N
AC M O T O R S
N
N
S
S
Poinr l
P0H1( 3
N
N N N
s
POlOr 2
S
S s
S
Point 4
Point 5 Po.int 6 Point 7
Phase 3
Phase 1
Figure 18.5 - 3-Phase Rotating-Ficld Polariti es & Input Volt ages
Using the left-hand rule for det ermining the electromagnetic polarity of the
p oles at any given instant we can consider that cement flows toward the
termi nal numbers for positive voltages, and away from the terminal numbers
for negative voltages.
The results are shown for voltage poin ts 1 to 7 in figure 18.5.
At magnetic field in coils 1 to 1A is at a maximum with the
as shown while at the sam e time, negative voltages are being felt in
2 to 2A and 3 to 3A windings. These create weaker magne tic fields, which
,,{>ct
t
tend to aid the 1 to 1A field,
At point 2, a maximum negative voltage is being felt in the 3 to 3A windings
and this creates a stro ng magnetic field, which, in turn, is aided by the weaker
fields in 1 to 1A and 2 to 2A. As each point on the voltage graph is analysed, i t
can be seen that the resultant magnetic field is ro tating in a clockwise direction .
Wh en the 3-phase voltage completes a full cycle, point 7, the magnetic field has
rotated thro ugh 360.
384
Copyrigbt Barry College2002 - 2006 All nghu reserved vIlJITV.parl66.co.Ilk
CIIA P T E R :IGHTE E
AC O T O R "
Rotor Behaviour in a Rotating Field
For purposes of explaining rotor movement, let us assume that we can place a
bar magnet in the centre of the stator diagrams of figure 18.5, mounted so that
it is free to rotate in this area. Let us also assume that the bar magn et is aligned
so that at point I it s south pole is opposite the large N of the stator field.
Now as we already know, unlike poles attract, and the two fields are aligned so
that they are attracting each other. Now, going from point 1 through point 7,
as before, the stator field rotates clockwise. The bar magnet, free to move, will
follow the stat or field, because the attr action between the two fields continues
to exist and a shaft running through the pivot point of the bar magnet wo uld
rotate at the same speed as the rotating field. This speed is known as
synchronous speed, the shaft representing the shaft of an operating motor to
which the load is attached.
This explanation is an oversimplification and is meant to show how a rotating
field can cause mechanical rotation of a shaft. Such an arrangement would
wo rk, but it is not used, as there are limitation s to a permanent magnet rotor.
Practical motors use other methods, as we shall see in the next paragr aphs.
Synchronous Motors
The construction of the synchronous motors is essentially the same as the
construction of the salient-pole alternator. In fact, such an alternator may be
run as an .AL mot or, illustrated in figure 18.6.
Figure 18.6 - Revolving-Field Synchronous Motor Z'
S
Synchronous motors have the characteristic of constant speed between no 10ft9
and full load conditions and they are capable of correcting the low pO::fer
factor of an inductive load when they are operated under certain
Thev are often used to drive DC generators. iJ
'
I
Synchronous motors are designed in sizes up to thousands of
They may be designed as either single-phase or multiphase madtlnes. The
following discussion is based on a three-phase design.
Copyrigbt Barry College 2002 - 2006 All n'gbt.J resened wwJlJ.part66:co.uk
385
CHAP T E R EIGHTEE N
AC MO T ORS
To understand how the synchrono us m otor works, assume that the app licatio n
of three-phase ac power to the stator causes a ro tating magne tic field t o be set
up around the rotor. The rotor is energised with dc, i.e. it acts like a bar
magnet, and the strong rotating magnetic field attract s the strong ro tor field
activated by the dc. This res ults in a strong turning force, i.e. torque, on the
ro tor shaft and it is therefo re abl e to turn a load as it rotates in step with the
rotating magnetic field. Anyway, it wo rks this way on ce it's started.
However, one of the disadvantages of a synchrono us motor is that it cannot be
started from a stan dstill by ap plying three-phase ac power to the stator. When
ac is applied to th e stator, a high- speed rotating magnetic field ap pears
immediately. Tills ro tating field rus hes past the ro tor poles so quickly tha t the
rotor does not have a cha nce to get star ted and in effect, the rotor is repelled
first in one direction and then the other. A synchronous motor in its purest
form has no starting torque and only has any t or que when it is running at
synchronous spee d.
A squirrel -cage rype of windi ng is added to the roto r of a syn chro no us motor
to cause it to start. The squir rel cage is shown as the outer part of the rotor in
figure 18.7 below.
Squirrel-Cage
Winding oyer
Salient-Pole
Windings
1
Figure 18.7 - Self-St arting Synchronous AC Motor
It is so nam ed becau se it is sh aped and looks like a tu rning squir rel or ham ster
cage. Simpl y, the windings are h eavy copper bars shorted toge ther by copper
rings and a low vol tage is induced in th ese shorted wi ndings by th e rotating
three-phase stator field. Because of the sho rt circuit, a relatively large current
flows in th e squirrel cage.
e
to
.$
T o start a prac tical synchronous m ot or, the stator is energise d, but th e dc
supply to th e rotor field is not energised. T h e squirr el-cage windings bring the
rotor to n ear synchron ous speed and at th at point, the dc field is energise d.
3 8 6
Copyngbt Barry Colkge 2002 - 2006 Aft rightt resened IJIWwparl66.co.1Ik
CHAPTER E IGHTEE N
AC MOTORS
This loc ks the rotor in step with the rota ting stator field, full torque is
devel oped, and the load is driven. A mechanical switching device that op erates
on centrifugal force is often used to ap ply dc to the ro tor as synchrono us
speed is r eached.
The practical synchronous mot or has the disadvant age of requi ring a dc exci ter
voltage for the rotor. This voltage may be obt ained either externally or
internally, depending on the design of the motor.
Induction Motors
The induction motor is the mo st commonly used type of ac motor. Its simple,
rugged construction costs relatively little to man ufacture. The induction motor
ha s a roto r that is not connect ed to an external sour ce. of voltage. The
inducti on motor derives it s name from the fact that ac voltages are induced in
th e ro tor circuit by the rotating magnetic field of the stator, In many ways,
induction in thi s motor is similar to the induction be tween the primary and
secondary windings of a transformer that we hav e already discussed.
Large motors and permanently mounted motors that drive load s at fairly
constant speed are often induction motors. The stator construction of the
three-phase induction motor and the thr ee-phase synchronous motor are
almost identical. H owever, their rotors are completely differ ent, figure 18.8.
Figure 18.8 - Typical Induction Motor
c;;;
>'(J
. -(
::1.
~
ci))
to
J:;
The induction rotor is made of a laminated cylinder with slots in its s u r f a ~ .
The windings in these slots are one of two types, figure 18.9. g
~
ro'
&
t;Y
Copynghf BarryCollege 2002 - 2006 AU rights reserved = p01166.(o' Jlk
387
CHAPTER E I G HTEEN
AC MOTORS
Copper
Bats
Met al Ring
Laminated Core
Laminated Core
Wound Rot or
FiglUe 18.9 - Types of AC Induction Motor Rotors
The most common is the squirrel-cage winding, which is entirely made up of
heavy copp er bars connected together at each end by a metal ring made of
copper or brass. No insulaqon is required betwe en the core and the bars
because of the very low voltages generated in the rot or bars. The other type of
winding contains actnal coils placed in the rotor slots and so is then called a
wound rotor. Regardless of whar type of rotor is used, the basic principle is the
same.
The rotating magnetic field generat ed in the stato r induces a magnetic field in
the roto r. The two fields interact and cause the rotor to tum. To obtai n
maximum betwe en the fields, th e air gap between the rotor and
sta tor is v05
0
P>n:fltr.
'l;J.e/b
e
o>-1\ f-'you know from Lene's law, any induced emf tries to oppos e the changing
\> field that induces it. In th e case of an induction motor, the changing field is the
. moti on of the resultant stator field. A force is exerted on the rotor by the
cY induced emf and the result ant magneti c field and this force tends to cancel the
relative moti on between the rot or and the stator field. The rot or, as a result,
moves in the same direction as the rota ting stator field.
It is impossible for the rot or of an induction motor to turn at the same speed
as the rotating magnetic field. If the speeds were the same, there would be no
relative moti on between the stator and rotor fields; without relative motion
there would be no induced voltage in the rotor. In order for relative motion to
exist between the two, the rotor must rotate at a spe ed slower than that of the
rotating magnetic field. The difference between the speed of the rotating
stator field and the rotor speed is called slip. The smaller the slip, the closer
the rotor speed approaches the stator field speed.
r
tu
The spe ed of the rotor depend s upon the torque requirements of the load. The 0,&
bigger the load, the stronger the turning force needed to rotate the rot or .
388
Copyright Barry 2002 2006 Ail right' rmrlJed lV'iVwpart66.co.uk
---
CH A ' T R EI O T E E N
AC M T O R S
The turning force can increase only if the rotor-induced emf increases. This
emf can incr ease only j f the magnetic field cuts through the rotor at a faster
rate . To increase the rela ti ve speed between the field and rotor, the rotor must
slow down. Therefore , for heavier loads the in duction motor turns sl ower
th an for Hghter loads.
\Xi:;; have air ;; dy discussed that slip is dir ectly proportiona l to the load on the
motor. Actua lly only a slight change in speed is necessary to produce th e usual
current changes required for no rmal changes in load. This is because the rotor
windings have such a low resistance and as a result, induction mot ors are called
constant-speedmotors.
Single-Phase Induction Motors
There are probably more si.ngle-phase ac inductio n mot ors in use today than
the total of all the ot her types put together. Obvious ly, it is logical that the least
expe nsive, lowest maintenance type of ac motor sho uld be used mos t often;
the single-phas e ac inductjon motor fits that descripti on.
Unlike po lyphase induction motors, the stator field in the single-phase motor
does not rotate. Instead it simply alternates polarity between poles as the ac
voltage changes polari ty.
"'Vol tage is induced in the ro tor as a result of magnetic induction, an d a
magnetic field is produced around the rotor. This field will always b e in
oppos ition to th e stator field, as Len z's law ap plies, but th e interaction between
the rotor and' stator fields will not produce rotation. TIl e doubl e-ended arrow
in figure 18.10, vi ew A shows the interacti on.
NR, 5R=Rotor field
N s, Ss = Stator field
1. Stationary
2. Rotating
Figure 18.10 - Rotor Currents in a Singl e-Phase AC Induction Motor
Cupyrighl Barry College2002 2006 A ll rightsreserved IJ=parl66.C'o.Jlk
389
C H A ER E I G H T E E N
A C M T O R
Because this force is across the rot or and through the pole pieces, there is no
rotary motion, just a push and/ or pull along thi s line.
Now, if some outside force rotates the rotor, the push-pull along the line in
figure 18.10, view A, is disturbed. If we now look at the rotating fields as
shown in figure 18.10, view B, at tills instant, the South Pole on the rot or is
being attracted by the left-hand pole and the north rotor pole is bein g attrac ted
to the right-hand pole. All of this is a result of the rotor being rotated 90
0
by
an outside force . The pull that now exists between the two fields becomes a
rotary for ce, turning the roto r and because the two fields continuously
alternate, they will never actually line up, and the rotor will continue to tum,
once starte d.
There are several types of single-phase induction motors .in use today. They are
basically identical except for their means of starting. In this chapter , we will
look at the split-phase and shade d-pole m otors; named because of the method s
used to get them started. Once they are up to operating speed, all single-phase
in duction mo tors operate the same.
Split-Phase Induction Motors
Split-Phase Motors are designed to use inductance, capacitance, or resistance
to develop a starting torque; all principles we have already learned in earlier
chapters.
Capacitor-Start
The of split-phase induction motor that we will cover is the
typ e. Figure 18.11 shows a simplified schematic of a typical
'/S-,. ) .
e capacitor-start motor.
. K>\.
.'0-'8
AC Single
Phase
Auxiliary
Supply
Winding
Capacitor
18.11 Capacitor-Stan, AC Induction Motor
390
Copyright Barry College 2002 - 2006 All rigbts reserved JJ/W1Vparl66.co.Jlk
CHAPTER EIGHTEE N
A C MOT 0 R.S
.Cp
"0.e.'be.
"O-,/>.\{'j
( ) Y
.,\ ",
. c<\\'
The sta tor con sists of the main winding and a starting winding, sometimes
called an auxiliary w-fnding. The starting winding is connected in parallel with
the mai n winding and is placed physically at right angles to it. A 90 elect rical
phase difference between the two w.indings is achi eved by connecting the
auxiliary' winding in series with a capacitor and starting switch. When the
motor is first energised, the starting switch is d o sed. This places the capaci tor
in series Wlti: the auxiliary winding. The capacitor ' s value is such that the
auxiliary circuit is effectively a resistive-capacitive circuit that has capacitive
reactance, express ed as
From our earlier work, you know that .in thi s circuit the curr ent leads th e line
voltage by about 45, because Xc is made to approximately equal R. The main
winding has en ough resistance-inductance, i.e, inductive reactance expressed as
XL' to cause the current to lag the line voltage by ab out 45, again because XL
approximately equals R. The currents in each winding ar e therefor e 90 but of
phase and so are the generated magnetic fields. The effect is that the two
windings act like a two -phase stato r and produce the rotating field requir ed to
star t the motor. When nearly full speed is obtained, a centrifugal devic e, e.g.
the starti ng switch, cut s out the starting windi ng. The motor then runs as a
plain single-p hase ind uction motor. Since th e auxiliary winding is only a llght
winding, the mot or does not devel op sufficient torque to start heavy loads an d
so split-phase mot or s onl y come in small sizes, e.g. avionic cooling blower
motors.
Resistance-Start
Another type of split-phase induction motor is th e resistance-start motor.
Thi s mot or also MS a starting winding, illustrated in figure 18.12, in additi on to
the main wind.ing.
1\)0
6
1\JJ'1
Main Winding
AC Single
Phase
Au.:ziJ.Ury
Supply
Winding
c;]
1
'OJ
ttl
Resistor Jj
p
Figure 18.12- Resistance-Start AC Induction Motor of}
t:::
tov "
The resist or is switched in and out of the circuit just as it is in the
start motor. The starting winding is positioned at right angles to main
winding and the electrical phase shift between the currents in the
is achieved by making the impedance of the windings unequal.
Cupyright BarryColl ege2002 - 2006 All rigbls reserved TlI1J/w.part66.fo.llk
39 1
C APTE R E I G H TE E N
AC M T O R S
The main winding has a high inductance and a low resistance. The current ,
therefore, Jags the voltage by a large angle. The starting winding is designed to
have a fairly low inductance and high resistance and so here the curre nt lags
the voltage by a smaller angle. For example, suppose the curr ent in the main
winding lags the voltage by 70; the current in the auxiliary winding lags the
voltage by 40. The curr ents are, therefor e, out of phase by 30 and the
magnetic fields are out of phase by the same amount, Although the ideal
angular phase difference is 90 for maximum starring torgue, the 30-pha se
difference still generates a ro tating field. This suppli es enough rorque to start
the motor.
When.the motor comes up to spee d, a speed-co ntro lled switch disconnects th e
starting winding from the line, and the motor continu es to ron as an inducti on
mot or. However, with this arrangement, the st arting torgue is not as great as it
is in the capacitor-start.
Shaded-Pole Induction Motors
T he shaded-pole in d uction m otor uses a uni que met hod to start th e rot or
turning. Constructing the stator ill a special way produces the effect of a
moving magnetic field. This mo tor has projectin g pol e pieces just like some dc
motors . In addition, a copper strap called a shading coil sur rounds portions of
the pole piece surfaces. This is illustrated in figure 18.13.
o
90
3.
Figure 18.13 - Shaded Pole AC Induction Mo tor
The strap causes the field to move back and for th across the face of the pole
piece. Not e the numbered sequence and points on the magnetisation curve in
the figure. As the alternating stator field starts increasing from zero (1), the
Jines of force expand across the face of the pole piece, cut through the strap
and so a voltage is induced in it . The cur rent that results generates a field that
opposes the cutting acti on, and decreases the str ength, of the main field. This
produces the following actions:
392
Copyright Bmry College 2002 - 2006 A ll rights reserved 1JIW1IJ.part66. t.o.ilk
'"
, 1<:,((,'"
Co''
\Jlb-
td
Cp'\ '
CH A P iER EIGHT E E tf
AC O T O R S
As the field increases from zero to a maximum at 90, a large portion of the
magneti c lines of force are conce ntrated in the unshaded por tion of the pole
(1). At 90 the field reaches its maximum value. Since the lines of fo rce have
stopped expandi ng, no emf is induced in th e strap, and no opposi ng ma gnetic
field is generated. As a result, the main field is uniformly distribu ted across the
pole (2).
From 90 to 180, the main field starts decr easing or collapsing inward and the
field generated in the strap opposes the collapsing field. The effec t is to
concentrate the lines of forc e in the shaded portion of the pole face (3) .
You can see that from 0
0
to 180, the main field has shifted acro ss the pole
face fr om the unshaded to the shaded porti on. Prom 180 to 360
0
, the main
field goes through the same change as it did from 0
0
to 180; however , it is
now in the opposite direction (4). The direction of the field does not affect the
way the shaded pole works. The motion of the field is the same during the
second half-cycle as it was during the first half of the cycle.
The motion of the field backwards and forwards between the shade d and
unshaded portions produces a weak torque to start the mo tor. Because of the
weak starting tor que, shaded-pole motor s are only built in small sizes and in
aviation, are only used to drive devices such as fans, clocks, blowers, etc.
Speed Single-Phase Induction Motors
The speed of inducti on motor s is dependent on motor design. The
synchronous speed, i.e, the speed at which the stator field rotates, is
de termined by the frequency of the input ac power and the number of poles in
The great er th e number of poles, the slower the synchrono us
the higher the frequency of applied voltage, the higher the synch ronous
speed.
Remember, however, tha t neith er the operating frequency or pole number s arc
variables, i.e. they are both fixed by the manufacturer. The relationship
between poles, frequency, and synchronous speed is given in the follow-ing
formula:
-0
.-<:
....
.....
Spe ed (RPM) - n = 120(
P
Wher e: n is the synchro nous speed in rpm
f is the fr equency of applied voltage in hertz
P is the number of poles in th e stator
Copyngbt Barry Colkge2002 2006 All rights reserted lJJ]J1JJ.Iparl66.co./tk
393
CH A P T ER E I G HTEEN
AC "'O T O R S
As we have seen before, the rotor is never able to reach synchronous speed as
if it did, there would be no voltage induced in the rotor; no torque would be
developed; the mot or would not operate. The difference between rotor speed
and synchronous speed, as we have already discussed, is called slip The
difference between these two speeds is not usually great, for example, a rotor
speed of 3400 to 3500 rpm can be expected from a synchronous spee d of 3600
rpm.
How to reverse the Direction of a 3 Phase AC Motor
In order to change the direction of moti on of an AC mot or, we need to reverse
the rotati on of the magnetic flux in the stat or. This can be achieved by
changing the connections to any two (2) of the three (3) motor terminals. The
ease with which it is possible to reverse the direction of rot ation constitutes
one of the advantages of three (3) phase mot ors.
394
Ccpyrigbt Barry Coikge 2002 - 2006 Al1 ngbtsreserved
You might also like
- 65 1 299 4 10 20150722 PDFDocument3 pages65 1 299 4 10 20150722 PDFsomnabuilistNo ratings yet
- 2 CV GearboxDocument1 page2 CV GearboxsomnabuilistNo ratings yet
- 434-3 Suspension UnitDocument5 pages434-3 Suspension UnitsomnabuilistNo ratings yet
- HONDA-C50 ΕΛΛΗΝΙΚΟ PDFDocument95 pagesHONDA-C50 ΕΛΛΗΝΙΚΟ PDFstankoub80% (41)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 2008 Final Exam PaperDocument9 pages2008 Final Exam PaperKurisu KrisNo ratings yet
- Latest Cables Interview Questions and Answers ListDocument96 pagesLatest Cables Interview Questions and Answers ListPeter EgbodorNo ratings yet
- Losses & Efficiency of Three Phase Induction Motor: Dr. Saif Thamer Al-ZubaidiDocument10 pagesLosses & Efficiency of Three Phase Induction Motor: Dr. Saif Thamer Al-ZubaididelvinNo ratings yet
- Developments in The Production of Grain-Oriented Electrical SteelDocument5 pagesDevelopments in The Production of Grain-Oriented Electrical Steelد. علا محمد حداويNo ratings yet
- 6 - Inductor, Inductance, and Inductive Reactance, Reactance PDFDocument11 pages6 - Inductor, Inductance, and Inductive Reactance, Reactance PDFJhoanna DacatimbangNo ratings yet
- Physics 33 - Electromagnetic Effects 2Document80 pagesPhysics 33 - Electromagnetic Effects 2Hakim AbbasNo ratings yet
- SIEMENS-Basics of Control ComponentsDocument108 pagesSIEMENS-Basics of Control ComponentsFarraz Sarmento SalimNo ratings yet
- Magnetic Field of Air-Core ReactorsDocument8 pagesMagnetic Field of Air-Core Reactorshusa501100% (1)
- Electromagnetic Effects: 300 Turns 30 TurnsDocument23 pagesElectromagnetic Effects: 300 Turns 30 TurnsEdgardo Leysa100% (5)
- SSPC Pa2 02Document7 pagesSSPC Pa2 02Cristian Espinoza100% (1)
- Am ItDocument27 pagesAm Itakalbhor90No ratings yet
- Mill Test CertificateDocument2 pagesMill Test CertificateAbdullah MughalNo ratings yet
- Electrical Engineering: Power ElectronicsDocument13 pagesElectrical Engineering: Power ElectronicsSaif UddinNo ratings yet
- Estimating Temperature Rise of Transformers Orenchak G. 2004)Document5 pagesEstimating Temperature Rise of Transformers Orenchak G. 2004)PL8ONo ratings yet
- PB PHT 1Document32 pagesPB PHT 1Gabriel Caicedo RussyNo ratings yet
- Class 8 Science WorksheetDocument4 pagesClass 8 Science WorksheetTaha ImranNo ratings yet
- Catalogues - AK STEEL - Mag - Cores - Data - BulletinDocument28 pagesCatalogues - AK STEEL - Mag - Cores - Data - BulletinRafal MazNo ratings yet
- Advantages of Static RelaysDocument14 pagesAdvantages of Static RelaysAbdulyunus AmirNo ratings yet
- vph24 v2.0Document21 pagesvph24 v2.0Mohammad Ivan HariyantoNo ratings yet
- Comparison of High-Speed Induction Motors Employing Cobalt-Iron and Silicon Electrical SteelDocument6 pagesComparison of High-Speed Induction Motors Employing Cobalt-Iron and Silicon Electrical SteelAli Al SHareifNo ratings yet
- POSCO Electrical Steel Catalogue PDFDocument14 pagesPOSCO Electrical Steel Catalogue PDFkoalaboiNo ratings yet
- Advanced Wireless Power Transfer SystemDocument29 pagesAdvanced Wireless Power Transfer SystemOssai IsraelNo ratings yet
- Transformer: Understanding Turn Ratio & Voltage ConversionDocument19 pagesTransformer: Understanding Turn Ratio & Voltage Conversionharsh ranaNo ratings yet
- 30 TOP MOST MAGNETIC CIRCUIT - Electrical Engineering Multiple Choice Questions and Answers Electrical Engineering Multiple Choice QuestionsDocument5 pages30 TOP MOST MAGNETIC CIRCUIT - Electrical Engineering Multiple Choice Questions and Answers Electrical Engineering Multiple Choice QuestionsVikas RazdanNo ratings yet
- Transformer Practice - Manufacture, Assembling, Connections, Operation and Testing.Document296 pagesTransformer Practice - Manufacture, Assembling, Connections, Operation and Testing.TaliaNaraNo ratings yet
- CG 03 (Flyback)Document4 pagesCG 03 (Flyback)adillukNo ratings yet
- Magnet 4 DocDocument4 pagesMagnet 4 DocMIS NURUL IMAN JakbarNo ratings yet
- Loading Capability of Transformer in Over-Excitation ConditionDocument4 pagesLoading Capability of Transformer in Over-Excitation ConditionKhashane Willy MohaleNo ratings yet
- Basic Electronics Notes Cover Components, CircuitsDocument45 pagesBasic Electronics Notes Cover Components, CircuitsJahannavi Singh0% (1)
- Dielectric Constant, k: Permittivity (ε)Document4 pagesDielectric Constant, k: Permittivity (ε)adylanNo ratings yet