You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Carcassonne New VersionDocument334 pagesCarcassonne New Versionavaloshe100% (2)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Signpost WordsDocument1 pageSignpost Wordsavaloshe100% (1)
- Spirit and Soul of Elixir Alchemy-LibreDocument29 pagesSpirit and Soul of Elixir Alchemy-LibreBhairava Bhairavesh100% (4)
- European Patent Specification: Anti-Il-33 Antibodies and Uses ThereofDocument129 pagesEuropean Patent Specification: Anti-Il-33 Antibodies and Uses ThereofavalosheNo ratings yet
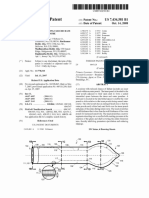
- US7906262Document50 pagesUS7906262avalosheNo ratings yet
- AU2016202220B2Document271 pagesAU2016202220B2avalosheNo ratings yet
- United States Patent (10) Patent No.: US 8,002,692 B2Document15 pagesUnited States Patent (10) Patent No.: US 8,002,692 B2avalosheNo ratings yet
- United States Patent (10) Patent No.: US 8.403,825 B2Document13 pagesUnited States Patent (10) Patent No.: US 8.403,825 B2avalosheNo ratings yet
- United States Patent: LavoisierDocument14 pagesUnited States Patent: LavoisieravalosheNo ratings yet
- European Patent Specification: Anti-Angptl8 Antibodies and Uses ThereofDocument174 pagesEuropean Patent Specification: Anti-Angptl8 Antibodies and Uses ThereofavalosheNo ratings yet
- Ielts Writing Lesson Plan 1 1Document10 pagesIelts Writing Lesson Plan 1 1avalosheNo ratings yet
- US7434581Document14 pagesUS7434581avalosheNo ratings yet
- May 3, 1955 R. E. Browning 2,744,410: Induction Type Wind Tunnel Filed Maroh'lS, 1952Document2 pagesMay 3, 1955 R. E. Browning 2,744,410: Induction Type Wind Tunnel Filed Maroh'lS, 1952avalosheNo ratings yet
- Build Your Own Inexpensive Wind Tunnel: Feature ArticleDocument11 pagesBuild Your Own Inexpensive Wind Tunnel: Feature ArticleavalosheNo ratings yet
- United States Patent (19) : Jan. 8, 1991 11 Patent Number: 45 Date of PatentDocument14 pagesUnited States Patent (19) : Jan. 8, 1991 11 Patent Number: 45 Date of PatentavalosheNo ratings yet
- Color and Shape Discrimination in The Stingless Bee Scaptotrigona Mexicana Guérin (Hymenoptera, Apidae)Document7 pagesColor and Shape Discrimination in The Stingless Bee Scaptotrigona Mexicana Guérin (Hymenoptera, Apidae)avalosheNo ratings yet
- Ulllted States Patent (10) Patent N0.: US 8,595,686 B2Document13 pagesUlllted States Patent (10) Patent N0.: US 8,595,686 B2avalosheNo ratings yet
- United States Patent: Baek (10) Patent N0.: (45) Date of PatentDocument17 pagesUnited States Patent: Baek (10) Patent N0.: (45) Date of PatentavalosheNo ratings yet
- United States Patent: Gandolph Et A) - Dec. 10, 2013Document15 pagesUnited States Patent: Gandolph Et A) - Dec. 10, 2013avalosheNo ratings yet
- United States Patent: Coldicott Et A) - (10) Patent N0.: (45) Date of PatentDocument13 pagesUnited States Patent: Coldicott Et A) - (10) Patent N0.: (45) Date of PatentavalosheNo ratings yet
- Ulllted States Patent (10) Patent N0.: US 8,584,803 B2Document14 pagesUlllted States Patent (10) Patent N0.: US 8,584,803 B2avalosheNo ratings yet
- United States: (12) Patent Application Publication (10) Pub. No.: US 2012/0229235 A1Document50 pagesUnited States: (12) Patent Application Publication (10) Pub. No.: US 2012/0229235 A1avalosheNo ratings yet
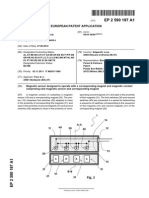
- Tepzz 6 - Z - 7A T: European Patent ApplicationDocument9 pagesTepzz 6 - Z - 7A T: European Patent ApplicationavalosheNo ratings yet
- Unlted States Patent (10) Patent N0.2 US 8,314,522 B2Document4 pagesUnlted States Patent (10) Patent N0.2 US 8,314,522 B2avalosheNo ratings yet
- EP2594645A2Document205 pagesEP2594645A2avalosheNo ratings yet
- EP2484769A2Document220 pagesEP2484769A2avalosheNo ratings yet
- Unlted States Patent (10) Patent No.: US 8,314,576 B2Document42 pagesUnlted States Patent (10) Patent No.: US 8,314,576 B2avalosheNo ratings yet
- Ulllted States Patent (10) Patent N0.: US 8,601,433 B2Document29 pagesUlllted States Patent (10) Patent N0.: US 8,601,433 B2avalosheNo ratings yet
- TEPZZ 59Z - 97A - T: European Patent ApplicationDocument10 pagesTEPZZ 59Z - 97A - T: European Patent ApplicationavalosheNo ratings yet
- United States: (12) Patent Application Publication (10) Pub. No.: US 2013/0186050 A1Document4 pagesUnited States: (12) Patent Application Publication (10) Pub. No.: US 2013/0186050 A1avalosheNo ratings yet
- Module 3 HW5Document14 pagesModule 3 HW5hgfhfghfghgNo ratings yet
- Autoliv 24GHz Radar ManualDocument16 pagesAutoliv 24GHz Radar ManualvagncarisiusNo ratings yet
- SurveyiingDocument11 pagesSurveyiingELEVATED KnowledgeNo ratings yet
- Week 5 - Random Variables, CDF, PDFDocument16 pagesWeek 5 - Random Variables, CDF, PDFHaris GhafoorNo ratings yet
- Stream, Streak, PathlinesDocument4 pagesStream, Streak, PathlineschauguleNo ratings yet
- FLY231GBDocument8 pagesFLY231GBIon VasileNo ratings yet
- ASTM D512 - Standard Test Methods For Chloride Ion in WaterDocument7 pagesASTM D512 - Standard Test Methods For Chloride Ion in Water23h45100% (1)
- Phreeqc 3 2013 ManualDocument519 pagesPhreeqc 3 2013 ManualpauloalpeNo ratings yet
- ) 1D Consolidation Analysis and Design - SoilWorksDocument59 pages) 1D Consolidation Analysis and Design - SoilWorksDeepthiNo ratings yet
- Determination of Elastic Constants of Additive Manufactured Inconel 625 Specimens Using An Ultrasonic TechniqueDocument11 pagesDetermination of Elastic Constants of Additive Manufactured Inconel 625 Specimens Using An Ultrasonic TechniqueHamidreza JavidradNo ratings yet
- SS Skyfr 000819 - 2Document3 pagesSS Skyfr 000819 - 2Anonymous HfsLqoWlNo ratings yet
- Pentaksiran Teori-Assignment DMC 3113Document4 pagesPentaksiran Teori-Assignment DMC 3113sharifahsalmah50No ratings yet
- RMA4 Users Guide 09-27-2011Document187 pagesRMA4 Users Guide 09-27-2011Athanasius Kurniawan Prasetyo AdiNo ratings yet
- Hussain Sagar Lake PollutionDocument5 pagesHussain Sagar Lake PollutionVenkateswarlu YadavalliNo ratings yet
- Bouncing Balls Gcse CourseworkDocument5 pagesBouncing Balls Gcse Courseworkrhpvslnfg100% (2)
- 50th Anniversary AHSMEDocument13 pages50th Anniversary AHSMEgauss202No ratings yet
- Technical Documentation - Regulation (EU) N. 2281 - 2016 - NECS 1314 - 3218 SEERDocument59 pagesTechnical Documentation - Regulation (EU) N. 2281 - 2016 - NECS 1314 - 3218 SEERAlexandru GNo ratings yet
- Safety Moment Manual LiftingDocument1 pageSafety Moment Manual LiftingEvert W. VanderBerg100% (1)
- T40 ManualDocument3 pagesT40 ManualJames RobertsNo ratings yet
- 049-Itp For Lighting and Small Power (Building) PDFDocument15 pages049-Itp For Lighting and Small Power (Building) PDFKöksal Patan100% (1)
- Case StudiesDocument17 pagesCase StudiesSahil TandonNo ratings yet
- Potential Difference WorksheetDocument2 pagesPotential Difference WorksheetDigCity DiggNo ratings yet
- AC Servo Spindle System (V2.5) - UDocument79 pagesAC Servo Spindle System (V2.5) - UDmytroKrNo ratings yet
- Sem - MTMM (David A. Kenny)Document8 pagesSem - MTMM (David A. Kenny)AJayNo ratings yet
- Ch.2 Deflection 1Document19 pagesCh.2 Deflection 1Long TingNo ratings yet
- DjekicDocument110 pagesDjekicРаденко ОстојићNo ratings yet
- BrakesDocument34 pagesBrakesMilan GrujićNo ratings yet
- Flat Earth Is The Perfect Psy-OpDocument2 pagesFlat Earth Is The Perfect Psy-OpAndrew Bauer0% (2)
- System of Linear InequalitiesDocument7 pagesSystem of Linear InequalitiesDominic SavioNo ratings yet