You might also like
- Solar Return BookDocument82 pagesSolar Return BookSorina Cazacu86% (29)
- Lunar RegolithDocument3 pagesLunar RegolithMichael LeppanNo ratings yet
- Libro Conplido en Los Juizios de Las EstrellasDocument22 pagesLibro Conplido en Los Juizios de Las EstrellaspomahskyNo ratings yet
- Physics Lab Report 1Document7 pagesPhysics Lab Report 1Liana BelleNo ratings yet
- Mathematical Introduction To Celestial Mechanics - Harry Pollard (Prentice Hall 1966 111p) PDFDocument61 pagesMathematical Introduction To Celestial Mechanics - Harry Pollard (Prentice Hall 1966 111p) PDFBetty Giai LevraNo ratings yet
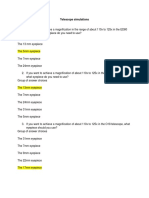
- Extra Assignment Astronomy - Telescope SimulationsDocument3 pagesExtra Assignment Astronomy - Telescope SimulationsgabriellarataNo ratings yet
- FF RulebookDocument60 pagesFF RulebookLegionXX100% (1)
- SBS-B Press KitDocument11 pagesSBS-B Press KitBob AndrepontNo ratings yet
- Cassine MissionPlan - RevNDocument217 pagesCassine MissionPlan - RevNByemanNo ratings yet
- A Parametric Sizing Model For Molten Regolith Electrolysis Reactors To Produce Oxygen On The MoonDocument19 pagesA Parametric Sizing Model For Molten Regolith Electrolysis Reactors To Produce Oxygen On The MoonMatthew AustinNo ratings yet
- Lunar Resources: Jump To Navigationjump To SearchDocument10 pagesLunar Resources: Jump To Navigationjump To SearchAryan KhannaNo ratings yet
- RM-90 Blue Scout IIDocument2 pagesRM-90 Blue Scout IIM. KorhonenNo ratings yet
- NASA: 187392main Aresv Fact SheetDocument4 pagesNASA: 187392main Aresv Fact SheetNASAdocumentsNo ratings yet
- WISE Fact SheetDocument2 pagesWISE Fact SheetBob Andrepont100% (1)
- Orbital MechanicsDocument28 pagesOrbital MechanicsMartin Schweighart MoyaNo ratings yet
- Expedition 30 31 Press KitDocument88 pagesExpedition 30 31 Press KitUhrin ImreNo ratings yet
- Origins of NASA NamesDocument242 pagesOrigins of NASA NamesdroberNo ratings yet
- STS-102 Press KitDocument72 pagesSTS-102 Press KitBob AndrepontNo ratings yet
- Lunar Sample Tool CatalogDocument101 pagesLunar Sample Tool CatalogPaul CultreraNo ratings yet
- Lunar Base Reference Mission For The Phased Implementation of BioregenerativeDocument169 pagesLunar Base Reference Mission For The Phased Implementation of BioregenerativeXar CrystalNo ratings yet
- UK-6 Press KitDocument16 pagesUK-6 Press KitBob AndrepontNo ratings yet
- Glory Understanding Earth's Energy BudgetDocument20 pagesGlory Understanding Earth's Energy BudgetBob AndrepontNo ratings yet
- Main Endeavour FinalDocument2 pagesMain Endeavour Finaljeffreyalles100% (1)
- 136202main Measure - Of.the - UniverseDocument10 pages136202main Measure - Of.the - UniverseSridhar Krishnamurthi100% (1)
- Mission Report STS-4 Test Mission Simulates Operational Flight. President Terms Success Golden Spike in SpaceDocument4 pagesMission Report STS-4 Test Mission Simulates Operational Flight. President Terms Success Golden Spike in SpaceBob AndrepontNo ratings yet
- Sirio Press KitDocument12 pagesSirio Press KitBob AndrepontNo ratings yet
- Design, Development and Testing Nitrous Oxide System of A Hybrid Rocket MotorDocument36 pagesDesign, Development and Testing Nitrous Oxide System of A Hybrid Rocket MotorMohamed TarmiziNo ratings yet
- NASA's Solar Maximum Mission A Look at A New SunDocument46 pagesNASA's Solar Maximum Mission A Look at A New SunBob AndrepontNo ratings yet
- Flashing-Beacon Experiment For Mercury-Atlas 9 MA-9 MissionDocument33 pagesFlashing-Beacon Experiment For Mercury-Atlas 9 MA-9 MissionBob AndrepontNo ratings yet
- Press Kit: Administration D C 20546Document19 pagesPress Kit: Administration D C 20546Bob AndrepontNo ratings yet
- STS-101 Press KitDocument78 pagesSTS-101 Press KitBob AndrepontNo ratings yet
- Will The Martian Space Vehicle Return To Earth?Document52 pagesWill The Martian Space Vehicle Return To Earth?Ardian RizaldiNo ratings yet
- Nasa TR R 401 PDFDocument87 pagesNasa TR R 401 PDFdineshNo ratings yet
- Atlas Centaur (AC-67) Lightning Strike Mishap 1987Document12 pagesAtlas Centaur (AC-67) Lightning Strike Mishap 1987rtphokieNo ratings yet
- Information: Titan II Space Launch Vehicle ProfileDocument2 pagesInformation: Titan II Space Launch Vehicle Profileedkyle99No ratings yet
- MIT16 522S15 Lecture16Document10 pagesMIT16 522S15 Lecture16Erik Nicholas BallesterosNo ratings yet
- NASA Facts Launch Complex 39, Pads A and B 2002Document8 pagesNASA Facts Launch Complex 39, Pads A and B 2002Bob Andrepont100% (1)
- Esro-IV Press KitDocument12 pagesEsro-IV Press KitBob AndrepontNo ratings yet
- Assignment 4 Lunar Lander Solution: Specification ValueDocument13 pagesAssignment 4 Lunar Lander Solution: Specification ValueirqoviNo ratings yet
- Final Science Results Spacelab J (STS-47)Document80 pagesFinal Science Results Spacelab J (STS-47)Bob AndrepontNo ratings yet
- Countdown NASA Space Shuttles and FacilitiesDocument28 pagesCountdown NASA Space Shuttles and FacilitiesBob AndrepontNo ratings yet
- Space Shuttle Mission STS-3Document81 pagesSpace Shuttle Mission STS-3Aviation/Space History LibraryNo ratings yet
- NASA Facts The TIMED Mission Exploring One of The Atmosphere's Last FrontiersDocument4 pagesNASA Facts The TIMED Mission Exploring One of The Atmosphere's Last FrontiersBob Andrepont100% (1)
- TIMED Fact SheetDocument2 pagesTIMED Fact SheetBob Andrepont100% (1)
- Space Launch System SLS NASADocument7 pagesSpace Launch System SLS NASAmsgetsemaniNo ratings yet
- LEAG SIM SAT2010 - LunarRegolithSimulantsDocument95 pagesLEAG SIM SAT2010 - LunarRegolithSimulantsMichael LeppanNo ratings yet
- Moon Base 89Document206 pagesMoon Base 89Xar CrystalNo ratings yet
- PRO E RelationDocument23 pagesPRO E Relationbalaji100% (1)
- NASA Facts Lightning and The Space Program 1998Document12 pagesNASA Facts Lightning and The Space Program 1998Bob Andrepont100% (1)
- Ssme5 2Document6 pagesSsme5 2ermkermkNo ratings yet
- RCA Satcom V Press KitDocument7 pagesRCA Satcom V Press KitBob AndrepontNo ratings yet
- NASA Facts Swift Catching Gamma Ray Bursts On The FlyDocument4 pagesNASA Facts Swift Catching Gamma Ray Bursts On The FlyBob Andrepont100% (1)
- Successful Completion of An Ambitious Project - A Midwinter Night's DreamDocument40 pagesSuccessful Completion of An Ambitious Project - A Midwinter Night's DreamEuropean Southern ObservatoryNo ratings yet
- NASA Facts Launch Complex 39, Pads A and B 2006Document8 pagesNASA Facts Launch Complex 39, Pads A and B 2006Bob Andrepont100% (1)
- Rehabilitation of The Rocket Vehicle Integration Test Stand at Edwards Air Force BaseDocument58 pagesRehabilitation of The Rocket Vehicle Integration Test Stand at Edwards Air Force BaseBob AndrepontNo ratings yet
- Orion Crew Exploration Vehicle Project MilestonesDocument24 pagesOrion Crew Exploration Vehicle Project MilestonesBob Andrepont100% (1)
- A Much Unsung Hero, The Lunar Landing Training Vehicle: And Other NASA RecollectionsFrom EverandA Much Unsung Hero, The Lunar Landing Training Vehicle: And Other NASA RecollectionsRating: 5 out of 5 stars5/5 (1)
- Nasa Secrets the Story of the Space Shuttle Vehicles— Launching SatellitesFrom EverandNasa Secrets the Story of the Space Shuttle Vehicles— Launching SatellitesNo ratings yet
- Biological Experiments in Space: 30 Years Investigating Life in Space OrbitFrom EverandBiological Experiments in Space: 30 Years Investigating Life in Space OrbitNo ratings yet
- Man on a Mission: The David Hilmers StoryFrom EverandMan on a Mission: The David Hilmers StoryRating: 4.5 out of 5 stars4.5/5 (2)
- Taking the Temperature of the Earth: Steps towards Integrated Understanding of Variability and ChangeFrom EverandTaking the Temperature of the Earth: Steps towards Integrated Understanding of Variability and ChangeGlynn HulleyNo ratings yet
- The Marmo Marmo Method Modelbuilding Guide #14: Building The 1/96 Scale Atlantis Moon ShipFrom EverandThe Marmo Marmo Method Modelbuilding Guide #14: Building The 1/96 Scale Atlantis Moon ShipNo ratings yet
- Apollo Stories - Space History and Law During the Pioneering Years of the Apollo Space ProgramFrom EverandApollo Stories - Space History and Law During the Pioneering Years of the Apollo Space ProgramNo ratings yet
- Passive Solar Heating Vastu Shastra Ver 1 0Document57 pagesPassive Solar Heating Vastu Shastra Ver 1 0SAGARUKINNo ratings yet
- SPOT 4 - Earth OnlineDocument4 pagesSPOT 4 - Earth Onlinenadish abrolNo ratings yet
- EstetikDocument45 pagesEstetikMaryama AflahaNo ratings yet
- PHYS 4110 - Dynamics of Space Vehicles: Chapter 5: Coordinate TransformationDocument14 pagesPHYS 4110 - Dynamics of Space Vehicles: Chapter 5: Coordinate TransformationMagno JuniorNo ratings yet
- Reading Lesson - Super SeniorsDocument11 pagesReading Lesson - Super SeniorsLakshmi Sreejesh NairNo ratings yet
- The Real Meaning of HamletDocument2 pagesThe Real Meaning of HamletJOHN HUDSONNo ratings yet
- Panchangam Festivals MudgalaDocument3 pagesPanchangam Festivals Mudgalasid sublimeNo ratings yet
- Concept Map The Solar SystemDocument1 pageConcept Map The Solar Systemapi-350785986No ratings yet
- Combinations For Property and HouseDocument2 pagesCombinations For Property and HouseS CKNo ratings yet
- Newton's Laws of MotionsDocument14 pagesNewton's Laws of MotionsRaj KomolNo ratings yet
- Rig Name Manager Rig Type Current Region Current StatusDocument17 pagesRig Name Manager Rig Type Current Region Current StatusAmitabhaNo ratings yet
- Merritt Morning Market #2332-Jul30Document2 pagesMerritt Morning Market #2332-Jul30Kim LeclairNo ratings yet
- Chief Mate Phase 1 Exam Paper Format - Terrestrial and Celestial Navigation 19052011Document1 pageChief Mate Phase 1 Exam Paper Format - Terrestrial and Celestial Navigation 19052011Thapliyal SanjayNo ratings yet
- Proceedings-Vol 08 No 10-July-Aug-Sept-1969 (George Van Tassel)Document16 pagesProceedings-Vol 08 No 10-July-Aug-Sept-1969 (George Van Tassel)Homers Simpson100% (2)
- Tungsten Filament Lamps For Domestic AND Similar General Lighting Purposes (FourthDocument48 pagesTungsten Filament Lamps For Domestic AND Similar General Lighting Purposes (FourthfarhanNo ratings yet
- Phil IRI FormsDocument4 pagesPhil IRI FormsArah Cell CagsNo ratings yet
- 2019 How Planetary Systems FormDocument5 pages2019 How Planetary Systems FormFavianna Colón IrizarryNo ratings yet
- Naming Children: According To NakshatraDocument7 pagesNaming Children: According To NakshatraMadhavendra Puri DasNo ratings yet
- Pair Conjugate Diameter of An Ellipse PDFDocument7 pagesPair Conjugate Diameter of An Ellipse PDFKalai MaranNo ratings yet
- Horoscope For Chandrashekar S KunderDocument5 pagesHoroscope For Chandrashekar S Kunderramachandra ksNo ratings yet
- Lesson 1: S11/12Ps-Iiib-11Document8 pagesLesson 1: S11/12Ps-Iiib-11Maurice LanceNo ratings yet
- Space Opera Character Record Sheet: Hand To HandDocument4 pagesSpace Opera Character Record Sheet: Hand To HandRichard Ranft100% (1)
- 3c. Waktu Sideris Dan SinodisDocument5 pages3c. Waktu Sideris Dan SinodisermildaNo ratings yet
- GK at GlanceDocument149 pagesGK at Glancesatish kumarNo ratings yet