You might also like
- FTTH CitiesDocument2 pagesFTTH CitiesPankaj MishraNo ratings yet
- Electronic Measurements & Instrumentation 5Document13 pagesElectronic Measurements & Instrumentation 5AdzLinkBalaoangNo ratings yet
- MCX AofDocument37 pagesMCX Aofllqa001No ratings yet
- 250 MR Excel Keyboard ShortcutsDocument17 pages250 MR Excel Keyboard ShortcutsNam Duy VuNo ratings yet
- Budget ExpectationsDocument16 pagesBudget Expectationsllqa001No ratings yet
- M IDocument5 pagesM Illqa001No ratings yet
- M IDocument5 pagesM Illqa001No ratings yet
- EC2351 NotesDocument12 pagesEC2351 NotesKoutheesh SellamuthuNo ratings yet
- Sekar Income Tax Calculation 2012-13Document9 pagesSekar Income Tax Calculation 2012-13llqa001No ratings yet
- Sekar Income Tax Calculation 2012-13Document9 pagesSekar Income Tax Calculation 2012-13llqa001No ratings yet
- Ece Measure InstrumentDocument17 pagesEce Measure Instrumentllqa001No ratings yet
- Cgpa CalculatorDocument2 pagesCgpa Calculatorllqa001No ratings yet
- Four in A Row Add: Please Enjoy Your Complimentary Math Board Game FromDocument7 pagesFour in A Row Add: Please Enjoy Your Complimentary Math Board Game Fromllqa001No ratings yet
- 52 Week Money Challenge Template Sheet1Document1 page52 Week Money Challenge Template Sheet1hsachin111No ratings yet
- Full Discription of Tunnel DiodeDocument30 pagesFull Discription of Tunnel Diodesahil6504No ratings yet
- DigiTAL ELEDocument13 pagesDigiTAL ELEllqa001No ratings yet
- Vlsi QBBDocument18 pagesVlsi QBBllqa001No ratings yet
- BusinessEntity Data StructureDocument6 pagesBusinessEntity Data Structurellqa001No ratings yet
- UDDI Is An XML-based Standard For: Describing, Publishing, and Finding Web Services. Discovery and IntegrationDocument8 pagesUDDI Is An XML-based Standard For: Describing, Publishing, and Finding Web Services. Discovery and Integrationllqa001No ratings yet
- Semiconductor ElectronicsDocument46 pagesSemiconductor Electronicspraveen2910No ratings yet
- Edc Unit 4 and 5Document20 pagesEdc Unit 4 and 5llqa001No ratings yet
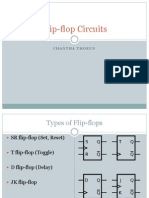
- Flip-Flop CircuitsDocument10 pagesFlip-Flop Circuitsllqa001No ratings yet
- Electric Circuits and Electron Devices (Unit-V)Document38 pagesElectric Circuits and Electron Devices (Unit-V)Dr. N.ShanmugasundaramNo ratings yet
- Bluetooth SecurityDocument72 pagesBluetooth SecurityArvy JohnNo ratings yet
- Dharani For DPSDDocument4 pagesDharani For DPSDDharani KumarNo ratings yet
- Bluetooth ArchitectureDocument29 pagesBluetooth Architecturellqa001No ratings yet
- LP ADocument4 pagesLP APrasanna BandaruNo ratings yet
- Electric Circuits and Electron Devices (Unit-V)Document38 pagesElectric Circuits and Electron Devices (Unit-V)Dr. N.ShanmugasundaramNo ratings yet
- LPDocument5 pagesLPllqa001No ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Library CollectionDocument8 pagesLibrary Collectionapi-282915005No ratings yet
- A Study of Verbs Compounded With Aus, Ein, Etc., As Contrasted With Those Compounded With Heraus, Hinaus, Herain, Hinein, EtcDocument152 pagesA Study of Verbs Compounded With Aus, Ein, Etc., As Contrasted With Those Compounded With Heraus, Hinaus, Herain, Hinein, EtcEnkindooNo ratings yet
- Flame Photometer: Models PFP7 and PFP7/C Operating and Service ManualDocument45 pagesFlame Photometer: Models PFP7 and PFP7/C Operating and Service ManualSree Nivas ReddyNo ratings yet
- Thin-Walled Structures: Jovan Trajkovski, Jasenko Perenda, Robert Kunc TDocument7 pagesThin-Walled Structures: Jovan Trajkovski, Jasenko Perenda, Robert Kunc TMohamed AmineNo ratings yet
- F Wedge+Pseudo 18 07 2021 TestDocument2 pagesF Wedge+Pseudo 18 07 2021 TestAryanNo ratings yet
- AGI MiniSting ManualDocument108 pagesAGI MiniSting ManualVvg ValenciaNo ratings yet
- Presentation For FPGA Image ProcessingDocument14 pagesPresentation For FPGA Image ProcessingSaad KhalilNo ratings yet
- Source: "Sears and Zemansky's University Physics With: Fig. 1. The Work Done On A Baseball Moving inDocument8 pagesSource: "Sears and Zemansky's University Physics With: Fig. 1. The Work Done On A Baseball Moving inMaria Diane DizonNo ratings yet
- TdsDocument4 pagesTdsRohith KommuNo ratings yet
- Unlocking The Secrets of Gann PDFDocument11 pagesUnlocking The Secrets of Gann PDFfsolomon100% (1)
- PL Fluke Biomedical (Ekatalog Link) 2018 - 2020Document2 pagesPL Fluke Biomedical (Ekatalog Link) 2018 - 2020lukas adi nugrohoNo ratings yet
- Wartsila o e W 50df TRDocument16 pagesWartsila o e W 50df TRNoel MejiaNo ratings yet
- Sagus 60Document1 pageSagus 60LLNo ratings yet
- Transline Part 2Document97 pagesTransline Part 2Haw-ChyunNo ratings yet
- Thermal Conductivity of MaterialDocument7 pagesThermal Conductivity of MaterialPhyu Mar Thein Kyaw0% (1)
- Chapter 17 - Essential Mathematical Methods Unit 1&2Document49 pagesChapter 17 - Essential Mathematical Methods Unit 1&2Kelley0% (1)
- Composite Materials, Advntage and Fabrication TechniquesDocument6 pagesComposite Materials, Advntage and Fabrication Techniquesanonymous qqNo ratings yet
- Probability Theory & Stochastic Processes - BITSDocument12 pagesProbability Theory & Stochastic Processes - BITSAllanki Sanyasi RaoNo ratings yet
- NI Vision: NI 17xx Smart Camera User ManualDocument90 pagesNI Vision: NI 17xx Smart Camera User ManualDushyant GuptaNo ratings yet
- 734 Part2 EmulsionDocument28 pages734 Part2 EmulsionSuvin PsNo ratings yet
- Lesson Plan - Physical ScienceDocument7 pagesLesson Plan - Physical Scienceapi-390871957No ratings yet
- 1.constrution of Flying Quad Rotor With Video Surveillance SystemDocument45 pages1.constrution of Flying Quad Rotor With Video Surveillance SystemakhilNo ratings yet
- Water DistillerDocument13 pagesWater DistillerjordanrmaNo ratings yet
- Typ. Beam Detail: ID FTB-1 FTB-2 B-1 Main LBDocument1 pageTyp. Beam Detail: ID FTB-1 FTB-2 B-1 Main LBRewsEnNo ratings yet
- Applied Clay Science: Research PaperDocument8 pagesApplied Clay Science: Research PaperDaniela NarvaezNo ratings yet
- Important MCQ - Materials and ComponentsDocument8 pagesImportant MCQ - Materials and ComponentsarijitlgspNo ratings yet
- Hydrograph ComponentsDocument4 pagesHydrograph ComponentsJoseph Daniel LucilloNo ratings yet
- GR 9 Eng BaselineDocument12 pagesGR 9 Eng BaselineMalie SibisiNo ratings yet
- Ground - Based Navigation AidsDocument22 pagesGround - Based Navigation Aidsjei liNo ratings yet
- Notification APSWREIS Teacher PostsDocument14 pagesNotification APSWREIS Teacher PostsRuthvik ReddyNo ratings yet