You might also like
- Inductance Measurements For Synchronous MachinesDocument2 pagesInductance Measurements For Synchronous MachinesYusuf YaşaNo ratings yet
- Differential Forms on Electromagnetic NetworksFrom EverandDifferential Forms on Electromagnetic NetworksRating: 4 out of 5 stars4/5 (1)
- Direct Torque ControlDocument5 pagesDirect Torque ControljanusanusNo ratings yet
- Modelling Asynchronous Machines by Electric Circuits: SebestyenDocument27 pagesModelling Asynchronous Machines by Electric Circuits: Sebestyenni60No ratings yet
- ConverDocument11 pagesConverAnonymous tJgIbVzpNo ratings yet
- Calculation of Power Losses in The Damper Winding Winding of Large Hidrogenerators at Open-Circuit and Load ConditionsDocument8 pagesCalculation of Power Losses in The Damper Winding Winding of Large Hidrogenerators at Open-Circuit and Load ConditionsWalter SantiNo ratings yet
- Resistivity Modeling: Propagation, Laterolog and Micro-Pad AnalysisFrom EverandResistivity Modeling: Propagation, Laterolog and Micro-Pad AnalysisNo ratings yet
- 3D MSC/EMAS Simulation of a Three Phase Power TransformerDocument11 pages3D MSC/EMAS Simulation of a Three Phase Power TransformerConstantin DorinelNo ratings yet
- MartinezMork Panel03Document15 pagesMartinezMork Panel03EderBridiNo ratings yet
- Rogowski Coil Transient Performance and Atp Simulation For Aplications in Protective RelaysDocument6 pagesRogowski Coil Transient Performance and Atp Simulation For Aplications in Protective RelaysJose Alberto RodriguezNo ratings yet
- Average Synchronous Torque of Synchronous Machines, With Particular Reference To Reluctance MachinesDocument3 pagesAverage Synchronous Torque of Synchronous Machines, With Particular Reference To Reluctance MachinesAbhishek AgarwalNo ratings yet
- Civil Services - Electrical Main Paper I & II - 1992-2012 - 7.6MBDocument253 pagesCivil Services - Electrical Main Paper I & II - 1992-2012 - 7.6MBAnika DixitNo ratings yet
- Short Circuit Current Forces PDFDocument4 pagesShort Circuit Current Forces PDFDaniel MemijeNo ratings yet
- Review Questions For Electrical Machines and DrivesDocument14 pagesReview Questions For Electrical Machines and DrivesClifford MkongNo ratings yet
- Artigo ElepotDocument7 pagesArtigo ElepotArthur HernandesNo ratings yet
- PSCAD Power System Lab ManualDocument23 pagesPSCAD Power System Lab ManualShiva Kumar100% (2)
- Spiral Vector Theory of Brushless DC MotorDocument8 pagesSpiral Vector Theory of Brushless DC Motorrigo84No ratings yet
- Exp2 Magnetic AmplifierDocument20 pagesExp2 Magnetic AmplifierNikhil Aggarwal50% (2)
- Zigzag Transformers Reduce HarmonicsDocument6 pagesZigzag Transformers Reduce Harmonicspd110382No ratings yet
- Model Multiwinding TransformDocument8 pagesModel Multiwinding Transformearla1005No ratings yet
- Roebel Bar ModelDocument4 pagesRoebel Bar Modelemmanuelmanyau7862No ratings yet
- Computation of Leakage Flux and Magnetic Force in Transformer by Using Field-Circuit Coupled Finite Element MethodDocument4 pagesComputation of Leakage Flux and Magnetic Force in Transformer by Using Field-Circuit Coupled Finite Element MethodmehdivinciNo ratings yet
- Sensorless Speed Detection of Squirrel-Cage Induction Machines Using Stator Neutral Point Voltage HarmonicsDocument9 pagesSensorless Speed Detection of Squirrel-Cage Induction Machines Using Stator Neutral Point Voltage HarmonicsJonas BorgesNo ratings yet
- Pulse-Width Modulation For Electronic Power ConversionDocument18 pagesPulse-Width Modulation For Electronic Power ConversionPhạm Văn TưởngNo ratings yet
- Seis Fases ElectricaDocument5 pagesSeis Fases ElectricaAnonymous 1D3dCWNcNo ratings yet
- Power System Analysis and Design SI Edition 6th Edition Glover Overbye Sarma 130563618X Test BankDocument14 pagesPower System Analysis and Design SI Edition 6th Edition Glover Overbye Sarma 130563618X Test Bankwanda100% (21)
- Test Bank For Power System Analysis and Design Si Edition 6Th Edition Glover Overbye Sarma 130563618X 9781305636187 Full Chapter PDFDocument35 pagesTest Bank For Power System Analysis and Design Si Edition 6Th Edition Glover Overbye Sarma 130563618X 9781305636187 Full Chapter PDFthomas.pelosi630100% (10)
- Engineering Vol 69 1900-04-20Document37 pagesEngineering Vol 69 1900-04-20ian_newNo ratings yet
- IAS Mains Electrical Engineering 1994Document10 pagesIAS Mains Electrical Engineering 1994rameshaarya99No ratings yet
- May 2010 SupDocument8 pagesMay 2010 SupViswa ChaitanyaNo ratings yet
- Test Bank For Power of Power System Analysis and Design 6Th Edition Glover Overbye Sarma 1305632133 9781305632134 Full Chapter PDFDocument35 pagesTest Bank For Power of Power System Analysis and Design 6Th Edition Glover Overbye Sarma 1305632133 9781305632134 Full Chapter PDFthomas.pelosi630100% (12)
- Starter RelayDocument0 pagesStarter RelayGthulasi78No ratings yet
- B.Tech ECE I Semester Model Question Paper on Fundamentals of Electrical EngineeringDocument3 pagesB.Tech ECE I Semester Model Question Paper on Fundamentals of Electrical EngineeringShashwat SinghNo ratings yet
- Electrical Machines and Power Systems-1Document13 pagesElectrical Machines and Power Systems-1Hamza AteeqNo ratings yet
- Full Marks: 50 Duration: 3 HoursDocument2 pagesFull Marks: 50 Duration: 3 HoursK JaiswalNo ratings yet
- Calculation of Short Circuit Reactance and Electromagnetic Forces in Three Phase Transformer by Finite Element MethodDocument6 pagesCalculation of Short Circuit Reactance and Electromagnetic Forces in Three Phase Transformer by Finite Element MethodJay JoshiNo ratings yet
- Experiment No. 04Document11 pagesExperiment No. 04Kris Dominic RubillosNo ratings yet
- DC MachineDocument33 pagesDC MachineJevon WilsonNo ratings yet
- Precise Method F o R Measuring XD and Based Test of Synchronous MachinesDocument8 pagesPrecise Method F o R Measuring XD and Based Test of Synchronous MachinesAbhishek AgarwalNo ratings yet
- R5310202 Electrical MeasurementsDocument2 pagesR5310202 Electrical MeasurementssivabharathamurthyNo ratings yet
- Ring Osc Phase NoiseDocument4 pagesRing Osc Phase NoiseHosein ZadeNo ratings yet
- Complex Vector Model of The Squirrel Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDocument8 pagesComplex Vector Model of The Squirrel Cage Induction Machine Including Instantaneous Rotor Bar CurrentsJorge Luis SotoNo ratings yet
- 07a50204 - Power ElectronicsDocument4 pages07a50204 - Power ElectronicsPaone KalyanNo ratings yet
- Campeanu Tranzitoriu SincronDocument10 pagesCampeanu Tranzitoriu SincronvalentinmullerNo ratings yet
- G Owacz - V13i2 - 6mathematical Model of DC Motor For Analysis of Commutation ProcesseDocument4 pagesG Owacz - V13i2 - 6mathematical Model of DC Motor For Analysis of Commutation ProcesseDante GuajardoNo ratings yet
- 1987 Static-Noise Margin Analysis of MOS SRAM CellsDocument7 pages1987 Static-Noise Margin Analysis of MOS SRAM CellsSwati Navdeep Aggarwal0% (1)
- Calculation of Cogging TorqueDocument4 pagesCalculation of Cogging TorqueMehdi SepehriNo ratings yet
- Excitation of Isolated Three-Phase Induction Generator by A Single CapacitorDocument7 pagesExcitation of Isolated Three-Phase Induction Generator by A Single CapacitorEngrImranKhanNo ratings yet
- A Vector Controlled Induction Motor Drive With Neural Network Based Space Vector Pulse Width ModulatorDocument8 pagesA Vector Controlled Induction Motor Drive With Neural Network Based Space Vector Pulse Width ModulatorTiruchengode VinothNo ratings yet
- Arc ModelDocument5 pagesArc Modelbinoy_ju07No ratings yet
- Suggested Practice ProblemsDocument2 pagesSuggested Practice ProblemsSaikat MallickNo ratings yet
- Machine Simulation ModelsDocument22 pagesMachine Simulation ModelsAshwani RanaNo ratings yet
- Magnetic Equivalent Circuit ModelingDocument12 pagesMagnetic Equivalent Circuit ModelingJavad Rahmany FardNo ratings yet
- Power System Analysis and Simulation Question PaperDocument2 pagesPower System Analysis and Simulation Question PaperKeyur PatelNo ratings yet
- Cap 6Document67 pagesCap 6ccprado1100% (1)
- Three Phase Transformer Model For TransientsDocument10 pagesThree Phase Transformer Model For TransientsYeissonSanabriaNo ratings yet
- Hardware Inloop Simulation IEEE LabVIEWDocument1 pageHardware Inloop Simulation IEEE LabVIEWvishiwizardNo ratings yet
- Op - XT546 246 346 - Op288 V03Document2 pagesOp - XT546 246 346 - Op288 V03vishiwizardNo ratings yet
- ACM2 TAU Datasheet enDocument5 pagesACM2 TAU Datasheet envishiwizardNo ratings yet
- Part Winding Startting The Three-Phase Squirrel Cage Induction Motor Air Gap Magnetic Field AnalysisDocument6 pagesPart Winding Startting The Three-Phase Squirrel Cage Induction Motor Air Gap Magnetic Field AnalysisIjabiNo ratings yet
- Maxwell 2dDocument7 pagesMaxwell 2dvishiwizardNo ratings yet
- Engineered PlasticsDocument61 pagesEngineered Plastics고병석No ratings yet
- LJLVJK LVJJV LKJVDocument5 pagesLJLVJK LVJJV LKJVvishiwizardNo ratings yet
- 50 SCS Automotive Coatings - Rev0913Document4 pages50 SCS Automotive Coatings - Rev0913vishiwizardNo ratings yet
- Electric Vehicle Motor Design NotesDocument131 pagesElectric Vehicle Motor Design NotesvishiwizardNo ratings yet
- TRL Definitions PDFDocument1 pageTRL Definitions PDFBHARadwajNo ratings yet
- ReadmeDocument4 pagesReadmevishiwizardNo ratings yet
- FAB Resistivity White PaperDocument8 pagesFAB Resistivity White PapervishiwizardNo ratings yet
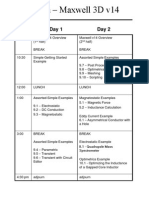
- Maxwell 3D v14 Training AgendaDocument1 pageMaxwell 3D v14 Training AgendavishiwizardNo ratings yet
- 5 SmanualDocument16 pages5 SmanualMark ThomasNo ratings yet
- Recent Advances in Materials For Use in Permanent Magnet Machines - A ReviewDocument7 pagesRecent Advances in Materials For Use in Permanent Magnet Machines - A ReviewvishiwizardNo ratings yet
- Jeas 1012 787Document5 pagesJeas 1012 787vishiwizardNo ratings yet
- Electrical Resin BenefitsDocument2 pagesElectrical Resin BenefitsvishiwizardNo ratings yet
- Nit 3600 1Document5 pagesNit 3600 1vishiwizardNo ratings yet
- Lit Survey RamamurthyDocument9 pagesLit Survey RamamurthyvishiwizardNo ratings yet
- Wittich2011 SonkusaleVanderveldeDocument1 pageWittich2011 SonkusaleVanderveldevishiwizardNo ratings yet
- Presentation 1Document1 pagePresentation 1vishiwizardNo ratings yet
- Big Energy Series 11.5.2012 Qing-Chang ZhongDocument1 pageBig Energy Series 11.5.2012 Qing-Chang ZhongvishiwizardNo ratings yet
- Brushless Motor FundamentalsDocument13 pagesBrushless Motor FundamentalsvishiwizardNo ratings yet
- Sensors Used in HEVDocument4 pagesSensors Used in HEVvishiwizard100% (1)
- How to Check a MOSFETDocument2 pagesHow to Check a MOSFETvishiwizardNo ratings yet
- FTF Aut f0234Document38 pagesFTF Aut f0234vishiwizardNo ratings yet
- Cam DesignDocument13 pagesCam DesignvishiwizardNo ratings yet
- A Brief Overview of Electric & Hybrid Electric Vehicle TechnologiesDocument1 pageA Brief Overview of Electric & Hybrid Electric Vehicle TechnologiesvishiwizardNo ratings yet
- Motor Primer1Document2 pagesMotor Primer1vishiwizardNo ratings yet
- Sona SPEED CatalogueDocument13 pagesSona SPEED CataloguevishiwizardNo ratings yet
- Activated Carbon Surface Modifications by Nitric Acid, Hydrogen Peroxide, and Ammonium Peroxydisulfate TreatmentsDocument7 pagesActivated Carbon Surface Modifications by Nitric Acid, Hydrogen Peroxide, and Ammonium Peroxydisulfate TreatmentsxavikxavikNo ratings yet
- Sand Replacement TestDocument4 pagesSand Replacement Testliwor34001No ratings yet
- Dry Quenched Coke - Enabler To Enhance BF PerformanceDocument26 pagesDry Quenched Coke - Enabler To Enhance BF PerformanceSatyamKumarNo ratings yet
- TID 1 Microbial Monitoring Strategies Oct 2015 V1.1Document21 pagesTID 1 Microbial Monitoring Strategies Oct 2015 V1.1chemjesuNo ratings yet
- Chemistry Project on Cosmetic ChemistryDocument48 pagesChemistry Project on Cosmetic ChemistryShubham SehgalNo ratings yet
- BTech I Year - SEM - A - PYQ - 2022-2023Document35 pagesBTech I Year - SEM - A - PYQ - 2022-2023Phono CompNo ratings yet
- Periodic Table (Crystal Structure) - WikipediaDocument5 pagesPeriodic Table (Crystal Structure) - WikipediaspritdummyNo ratings yet
- MIT2 2F13 Shapi5.18 SolutDocument4 pagesMIT2 2F13 Shapi5.18 SolutIhab OmarNo ratings yet
- Landfill Environmental Impact 2Document60 pagesLandfill Environmental Impact 2Demamu TageleNo ratings yet
- Reportsheet#2 Chemicalactivityandcorrosionofmetals Chem1103l Group26Document7 pagesReportsheet#2 Chemicalactivityandcorrosionofmetals Chem1103l Group26MarielleCaindecNo ratings yet
- Spectrophotometric Analysis of A Commercial Aspirin TabletDocument5 pagesSpectrophotometric Analysis of A Commercial Aspirin TabletHasan RajabNo ratings yet
- Simulation Propylene PropaneDocument6 pagesSimulation Propylene PropaneFabrizzio Renzo Chanco CapuchoNo ratings yet
- ReynaDocument8 pagesReynaLuke BelmarNo ratings yet
- B Bogdanov 2Document6 pagesB Bogdanov 2tonmoyahmed06No ratings yet
- Tehnički Opis R32 Monobloc S THERMA VDocument16 pagesTehnički Opis R32 Monobloc S THERMA VMladen DusmanovicNo ratings yet
- Formation of Integral Skin Polyurethane FoamsDocument11 pagesFormation of Integral Skin Polyurethane FoamsHariHaran RajendranNo ratings yet
- Ether (Theory) Module-4Document7 pagesEther (Theory) Module-4Raju SinghNo ratings yet
- Physics Syllabus 2026-2028Document63 pagesPhysics Syllabus 2026-2028jeaninealemamensahNo ratings yet
- Geochemistry of Coal Mine DrainageDocument22 pagesGeochemistry of Coal Mine DrainageFirmanullahyusufNo ratings yet
- Notes Electrochemistry 2021 IIDocument117 pagesNotes Electrochemistry 2021 IISavvy GuptaNo ratings yet
- Separation and Concentration Technologies in Food ProcessingDocument84 pagesSeparation and Concentration Technologies in Food Processingjoenni hansNo ratings yet
- Chemistry Chapter 4Document15 pagesChemistry Chapter 4Madison CraterNo ratings yet
- Electron Diffraction Lab Report - KatzerDocument7 pagesElectron Diffraction Lab Report - Katzerapi-489811472No ratings yet
- Tom Mboya University College Exam Focuses on Inorganic Chemistry ConceptsDocument4 pagesTom Mboya University College Exam Focuses on Inorganic Chemistry ConceptsEZEKIEL IGOGONo ratings yet
- Random Chemical Interesterification ProcessDocument7 pagesRandom Chemical Interesterification ProcessGurnoor KaurNo ratings yet
- OME754 INDUSTRIALSAFETY-Unit II NotesDocument106 pagesOME754 INDUSTRIALSAFETY-Unit II Notesraghul balaNo ratings yet
- Grade 11 Quiz Bee Questions on Rocks, Heat Transfer, Plate TectonicsDocument4 pagesGrade 11 Quiz Bee Questions on Rocks, Heat Transfer, Plate Tectonicsellton john pilarNo ratings yet
- BIOCHEMISTRY CARBOHYDRATESDocument100 pagesBIOCHEMISTRY CARBOHYDRATESJiezl Abellano AfinidadNo ratings yet
- DRAP Monthly Progress ReportDocument7 pagesDRAP Monthly Progress ReportKhawaja AsadNo ratings yet
- Lab 1 PH Conductivity TurbidityDocument4 pagesLab 1 PH Conductivity TurbiditySumit Priyam67% (3)
- Build Your Own Electric Vehicle, Third EditionFrom EverandBuild Your Own Electric Vehicle, Third EditionRating: 4.5 out of 5 stars4.5/5 (3)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (542)
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- The Graphene Revolution: The Weird Science of the Ultra-thinFrom EverandThe Graphene Revolution: The Weird Science of the Ultra-thinRating: 4.5 out of 5 stars4.5/5 (4)
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- Digital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsFrom EverandDigital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsRating: 5 out of 5 stars5/5 (3)
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- Automotive Electronic Diagnostics (Course 2)From EverandAutomotive Electronic Diagnostics (Course 2)Rating: 4 out of 5 stars4/5 (2)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Wearable Sensors: Fundamentals, Implementation and ApplicationsFrom EverandWearable Sensors: Fundamentals, Implementation and ApplicationsEdward SazonovNo ratings yet
- Winning in 2025: Digital and Data Transformation: The Keys to SuccessFrom EverandWinning in 2025: Digital and Data Transformation: The Keys to SuccessNo ratings yet
- A Mind at Play: How Claude Shannon Invented the Information AgeFrom EverandA Mind at Play: How Claude Shannon Invented the Information AgeRating: 4 out of 5 stars4/5 (52)
- Electrical Principles and Technology for EngineeringFrom EverandElectrical Principles and Technology for EngineeringRating: 4 out of 5 stars4/5 (4)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsFrom EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsRating: 5 out of 5 stars5/5 (2)