You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Maths QP Set-1Document6 pagesMaths QP Set-1Zam NaizamNo ratings yet
- NSIDPG ENG Petroleum Engineering Jan 2019Document6 pagesNSIDPG ENG Petroleum Engineering Jan 2019Mohamed-DeqSabriyeNo ratings yet
- Quantitative Techniques in Management: Part A Descriptive Type QuestionDocument33 pagesQuantitative Techniques in Management: Part A Descriptive Type QuestionAiDLo67% (9)
- Aero Structures-Basic ElasticityDocument54 pagesAero Structures-Basic ElasticityFaryal BatoolNo ratings yet
- Geometrija Oblast TrigonometrijaDocument28 pagesGeometrija Oblast TrigonometrijaSolisterADV100% (1)
- The Transition From Calculus and To AnalysisDocument14 pagesThe Transition From Calculus and To AnalysisAlfonso Gómez MulettNo ratings yet
- Nonlinear Dynamic Analysis of Chemical Engineering Processes Described by Differential-Algebraic Equations SystemsDocument6 pagesNonlinear Dynamic Analysis of Chemical Engineering Processes Described by Differential-Algebraic Equations SystemsDiego JesusNo ratings yet
- Numerical Methods NotesDocument180 pagesNumerical Methods NotesSyed Hasif Sy Mohamad100% (1)
- Year 10 Accelerated Program 2023Document14 pagesYear 10 Accelerated Program 2023Ralph Rezin MooreNo ratings yet
- Zill PPT CH 01Document21 pagesZill PPT CH 01Kenneth Rodriguez HerminadoNo ratings yet
- Revision Test - 1 (MATHS) ON 28-12-17Document2 pagesRevision Test - 1 (MATHS) ON 28-12-17RG PlaytechNo ratings yet
- Pid ToolboxDocument6 pagesPid ToolboxAnonymous WkbmWCa8MNo ratings yet
- Sheetal 202890 PPT Integral Equation and Calculus of VariationsDocument13 pagesSheetal 202890 PPT Integral Equation and Calculus of Variations18 princy kaushikNo ratings yet
- Dielectric Image MethodsDocument14 pagesDielectric Image Methodssh1tty_cookNo ratings yet
- Acoustic Diffuser Optimization ArqenDocument86 pagesAcoustic Diffuser Optimization ArqenPedroMeirelesNo ratings yet
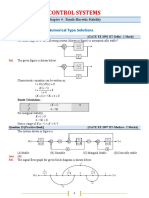
- Control Systems: GATE Objective & Numerical Type SolutionsDocument14 pagesControl Systems: GATE Objective & Numerical Type SolutionsAakash DewanganNo ratings yet
- Second Degree EquationDocument5 pagesSecond Degree Equationaerogem618100% (1)
- 3D - SolutionDocument29 pages3D - SolutionAbhishek JainNo ratings yet
- MODULE 5 Lesson 2Document8 pagesMODULE 5 Lesson 2Jan JanNo ratings yet
- DESMOS Graphing AssignmentDocument17 pagesDESMOS Graphing AssignmentAnonymous 7GjdlMDoGNo ratings yet
- Romberg & Gaussian Integration) - Part 2Document18 pagesRomberg & Gaussian Integration) - Part 2Eyu KalebNo ratings yet
- Assignment 2: Markov ChainDocument1 pageAssignment 2: Markov ChainAimaan SharifaNo ratings yet
- General Mathematics-FINALDocument187 pagesGeneral Mathematics-FINALDummy AccountNo ratings yet
- Electromagnetic Forces in COMSOLDocument10 pagesElectromagnetic Forces in COMSOLAlkalin100% (1)
- Simulink Basics TutorialDocument48 pagesSimulink Basics Tutorialyun haeNo ratings yet
- Analysis of Statically Determinate Structures: Support ConnectionDocument7 pagesAnalysis of Statically Determinate Structures: Support ConnectionejlNo ratings yet
- 7.5 Complex Fractions PDFDocument7 pages7.5 Complex Fractions PDFLaiza Niña Gimenez LariegoNo ratings yet
- Optics Presentation For IIIT DM Jabalput StudentsDocument17 pagesOptics Presentation For IIIT DM Jabalput StudentsSYED MAJID AHMADNo ratings yet
- Course 1Document138 pagesCourse 1Rabaa DooriiNo ratings yet
- Differential Calculus EXAM ANSWEY KEYDocument2 pagesDifferential Calculus EXAM ANSWEY KEYlarry soiranoNo ratings yet