You might also like
- Electromagnetic TechniquesDocument15 pagesElectromagnetic TechniquesYaparla DeepthiNo ratings yet
- Time Domain Electromagnetic MethodsDocument16 pagesTime Domain Electromagnetic MethodsAydin Nejati100% (1)
- Geophysics Exploration - Chapter 6Document43 pagesGeophysics Exploration - Chapter 6Abraham SileshiNo ratings yet
- Principles of Electric Methods in Surface and Borehole GeophysicsFrom EverandPrinciples of Electric Methods in Surface and Borehole GeophysicsRating: 3 out of 5 stars3/5 (1)
- TEM1D - ZongeDocument18 pagesTEM1D - ZongeYoqie Ali Taufan100% (1)
- 12 - Chapter 5 PDFDocument67 pages12 - Chapter 5 PDFPranav. ThubeNo ratings yet
- Geophysics GravityDocument36 pagesGeophysics Gravityazfarazwanis100% (1)
- Electromagnetic Radiation PDFDocument30 pagesElectromagnetic Radiation PDFge120120No ratings yet
- Basics of Seismic ProspectingDocument68 pagesBasics of Seismic Prospectingshubham panchalNo ratings yet
- Electrical Resistivity Methods 13 PDFDocument108 pagesElectrical Resistivity Methods 13 PDFNamwangala Rashid NatinduNo ratings yet
- RAI and AIDocument4 pagesRAI and AIbidyut_iitkgpNo ratings yet
- Seismic 101 LectureDocument67 pagesSeismic 101 Lecturerobin2806100% (2)
- Geoelectrical Methods for Subsurface ExplorationDocument14 pagesGeoelectrical Methods for Subsurface ExplorationJasonNo ratings yet
- What Is Seismic Interpretation? Alistair BrownDocument4 pagesWhat Is Seismic Interpretation? Alistair BrownElisa Maria Araujo GonzalezNo ratings yet
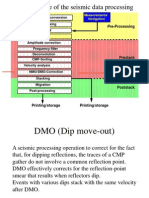
- Basic Scheme of The Seismic Data ProcessingDocument17 pagesBasic Scheme of The Seismic Data ProcessingEmma KokakuNo ratings yet
- Geophysical Methods For Groundwater Resources Assessment deDocument11 pagesGeophysical Methods For Groundwater Resources Assessment dedurbakulaNo ratings yet
- Tomography HumphreysDocument21 pagesTomography HumphreysMohd RezalNo ratings yet
- A Plane EM Wave Is Travelling Vertically Downwards in The Earth in The ZDocument3 pagesA Plane EM Wave Is Travelling Vertically Downwards in The Earth in The Zpata sharma100% (1)
- Surface Waves: Rayleigh and Love Waves Particle Motion Phase and Group Velocity DispersionDocument6 pagesSurface Waves: Rayleigh and Love Waves Particle Motion Phase and Group Velocity DispersionEzzadin BabanNo ratings yet
- Fundamentals of Seismic Data Interpretation ReportDocument29 pagesFundamentals of Seismic Data Interpretation ReportAbhishek Singh100% (1)
- Find Earthquake EpicentersDocument15 pagesFind Earthquake EpicentersRahman Atthariq0% (1)
- Reverse-Time Migration Imaging PrinciplesDocument36 pagesReverse-Time Migration Imaging Principlespratk2No ratings yet
- Pe20m017 Vikrantyadav Modelling and InversionDocument18 pagesPe20m017 Vikrantyadav Modelling and InversionNAGENDR_006No ratings yet
- Magnetic Surveying For Buried Metallic ObjectsDocument8 pagesMagnetic Surveying For Buried Metallic ObjectsV100% (4)
- Velocity Analysis ProcessingDocument24 pagesVelocity Analysis ProcessingLilyNo ratings yet
- Understanding Normal MoveoutDocument7 pagesUnderstanding Normal MoveoutabuobidaNo ratings yet
- Geophysical Exploration & Seismic Interpretation PE-309 Lecture NotesDocument6 pagesGeophysical Exploration & Seismic Interpretation PE-309 Lecture NotesMaisam AbbasNo ratings yet
- Pre Stack Migration Aperture - An Overview: Dr. J.V.S.S Narayana Murty, T. ShankarDocument6 pagesPre Stack Migration Aperture - An Overview: Dr. J.V.S.S Narayana Murty, T. ShankarJVSSNMurty100% (1)
- 1 Introduction of GeophysicsDocument7 pages1 Introduction of GeophysicsAl MamunNo ratings yet
- Statics Correction ElevationDocument9 pagesStatics Correction ElevationAndi Mahri100% (1)
- Fundamental of Seismic Genap 2013-2014 TGDocument66 pagesFundamental of Seismic Genap 2013-2014 TGFandy MuhammadNo ratings yet
- GeophysicsDocument22 pagesGeophysicsMark MaoNo ratings yet
- Seismic instrumentation components and data acquisitionDocument37 pagesSeismic instrumentation components and data acquisitionNamwangala Rashid NatinduNo ratings yet
- Sdan 0025-0158 CDocument134 pagesSdan 0025-0158 CGis7No ratings yet
- T1. Fundamentals of SeimologyDocument54 pagesT1. Fundamentals of SeimologyAbraham KefelegnNo ratings yet
- Detecting Faults and Fractures Using Spectral DecompositionDocument2 pagesDetecting Faults and Fractures Using Spectral Decompositionanima1982No ratings yet
- Course Notes For GeophysicsDocument30 pagesCourse Notes For GeophysicsShivendra Pratap SinghNo ratings yet
- AVO Cendra JanuariDocument12 pagesAVO Cendra JanuaricendraNo ratings yet
- Seismic ResolutionDocument22 pagesSeismic ResolutionlomierNo ratings yet
- G Magnetics MethodsDocument35 pagesG Magnetics MethodsAshrafNo ratings yet
- FB Tutorial Migration Imaging Conditions 141201Document11 pagesFB Tutorial Migration Imaging Conditions 141201Leonardo Octavio Olarte SánchezNo ratings yet
- Seismic VibroseisDocument37 pagesSeismic VibroseisMithunNo ratings yet
- New Classification System Proposed for Granitic PegmatitesDocument25 pagesNew Classification System Proposed for Granitic PegmatitesMyself Myself100% (1)
- GeophysicsDocument37 pagesGeophysicsiGEO TrainingNo ratings yet
- RAI Attribute (Emujakporue Nigeria) PDFDocument11 pagesRAI Attribute (Emujakporue Nigeria) PDFFurqanButtNo ratings yet
- SEISMOLOGY, Lecture 2Document38 pagesSEISMOLOGY, Lecture 2Singgih Satrio WibowoNo ratings yet
- AVO TheoryDocument44 pagesAVO TheoryVijay Yadav100% (2)
- Magnetotelluric (MT) MethodDocument42 pagesMagnetotelluric (MT) MethodRakhaNo ratings yet
- Reservoir Rock Properties: Petroleum Geology AES/TA 3820Document41 pagesReservoir Rock Properties: Petroleum Geology AES/TA 3820aliy2k4uNo ratings yet
- Seismic Stratigraphy InterpretationsDocument15 pagesSeismic Stratigraphy InterpretationsSabahatFatimaNo ratings yet
- Geophysics 224 Geophysical Exploration Techniques Final Exam Section Instructor Date Time AllowedDocument8 pagesGeophysics 224 Geophysical Exploration Techniques Final Exam Section Instructor Date Time AllowedSuraj KumarNo ratings yet
- Seismic Refraction Prospecting PDFDocument621 pagesSeismic Refraction Prospecting PDFGusti N Kusuma WijayaNo ratings yet
- The Seismic Inversion MethodDocument128 pagesThe Seismic Inversion Methodgodfrey edezuNo ratings yet
- Lab 04 - Seismic DeconvolutionDocument10 pagesLab 04 - Seismic Deconvolutionapi-323770220No ratings yet
- Questions: Seismic Refraction and ReflectionDocument16 pagesQuestions: Seismic Refraction and ReflectionAndrei Bocin0% (1)
- Understanding the Bouguer Anomaly: A Gravimetry PuzzleFrom EverandUnderstanding the Bouguer Anomaly: A Gravimetry PuzzleRating: 2 out of 5 stars2/5 (1)
- Atlas of Structural Geological Interpretation from Seismic ImagesFrom EverandAtlas of Structural Geological Interpretation from Seismic ImagesAchyuta Ayan MisraNo ratings yet
- Principles of the Magnetic Methods in GeophysicsFrom EverandPrinciples of the Magnetic Methods in GeophysicsRating: 2 out of 5 stars2/5 (1)
- Direct Current Geoelectric Sounding: Principles And InterpretationFrom EverandDirect Current Geoelectric Sounding: Principles And InterpretationRating: 5 out of 5 stars5/5 (1)
- Respectfully Submitted,: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011Document1 pageRespectfully Submitted,: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011JavedkhanaNo ratings yet
- 21 HELIBORNE MAGNETIC AND TDEM SURVEY RESULTSDocument1 page21 HELIBORNE MAGNETIC AND TDEM SURVEY RESULTSJavedkhanaNo ratings yet
- 20 HELIBORNE MAGNETIC AND TDEM SURVEY, SHINING TREEDocument1 page20 HELIBORNE MAGNETIC AND TDEM SURVEY, SHINING TREEJavedkhanaNo ratings yet
- Digital Data Compilation: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011Document1 pageDigital Data Compilation: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011JavedkhanaNo ratings yet
- Survey Specifications: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011Document1 pageSurvey Specifications: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011JavedkhanaNo ratings yet
- Figure 6: Near Surface Magmatic Signatur Agmatic Signature Visible On The Residual Magnetic Intensity e Visible On The Residual Magnetic IntensityDocument1 pageFigure 6: Near Surface Magmatic Signatur Agmatic Signature Visible On The Residual Magnetic Intensity e Visible On The Residual Magnetic IntensityJavedkhanaNo ratings yet
- Helimag 17Document1 pageHelimag 17JavedkhanaNo ratings yet
- Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011Document1 pageHeliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011JavedkhanaNo ratings yet
- Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011Document1 pageHeliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011JavedkhanaNo ratings yet
- 13 HELIBORNE MAGNETIC AND TDEM SURVEY SHINING TREE PROPERTY 2011Document1 page13 HELIBORNE MAGNETIC AND TDEM SURVEY SHINING TREE PROPERTY 2011JavedkhanaNo ratings yet
- Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011Document1 pageHeliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011JavedkhanaNo ratings yet
- System Tests: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011Document1 pageSystem Tests: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011JavedkhanaNo ratings yet
- Cloning ModelDocument2 pagesCloning ModelJavedkhanaNo ratings yet
- Release NotesDocument1 pageRelease NotesJavedkhanaNo ratings yet
- Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011Document1 pageHeliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011JavedkhanaNo ratings yet
- Magnetic ExplorationDocument15 pagesMagnetic ExplorationJavedkhanaNo ratings yet
- Item Specification: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011Document1 pageItem Specification: Heliborne Magnetic and Tdem Survey, Shining Tree Property, QC - 2011JavedkhanaNo ratings yet
- Xyzgms: Builds GM-SYS Starting ModelsDocument4 pagesXyzgms: Builds GM-SYS Starting ModelsMoise SoaresNo ratings yet
- Electrode ConfigurationsDocument5 pagesElectrode ConfigurationsJavedkhanaNo ratings yet
- GMSYS-3D Release NotesDocument2 pagesGMSYS-3D Release NotesFardy SeptiawanNo ratings yet
- GMSYS-3D Release NotesDocument2 pagesGMSYS-3D Release NotesFardy SeptiawanNo ratings yet
- HP Z840 Workstation SpecsDocument2 pagesHP Z840 Workstation SpecsJavedkhanaNo ratings yet
- Slope Half SlopeDocument2 pagesSlope Half SlopeJavedkhanaNo ratings yet
- Electrical Survey DesignDocument9 pagesElectrical Survey DesignJavedkhanaNo ratings yet
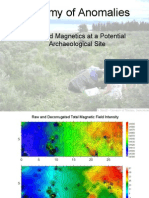
- Archaeological Site Total Field Magnetics Anomaly AnalysisDocument5 pagesArchaeological Site Total Field Magnetics Anomaly AnalysisJavedkhanaNo ratings yet
- Induced Polarization Survey TechniquesDocument7 pagesInduced Polarization Survey TechniquesJavedkhanaNo ratings yet