You might also like
- Cam Follower Lab ReportDocument16 pagesCam Follower Lab ReportAustin Williams80% (5)
- Dynamic Balancing ExpDocument10 pagesDynamic Balancing ExpSand Man Out100% (1)
- NUS ME3112-2 LabDocument15 pagesNUS ME3112-2 LabClifton ChangNo ratings yet
- Research On Dynamic Balancing Simulation of RotaryDocument6 pagesResearch On Dynamic Balancing Simulation of RotaryFITAS MOUNIRNo ratings yet
- Code: Kdm2-1 Title: Basic of Balancing 1.0 Learning Outcome at The End of This Experiment, The Student Should Be Able ToDocument5 pagesCode: Kdm2-1 Title: Basic of Balancing 1.0 Learning Outcome at The End of This Experiment, The Student Should Be Able ToMohd Irman100% (1)
- 17AIC BaylonDocument12 pages17AIC Baylonskdelacruz.djdengrNo ratings yet
- Crank and slider mechanism lab experiment resultsDocument18 pagesCrank and slider mechanism lab experiment resultsAfif HaziqNo ratings yet
- MV 1 Lab ReportDocument9 pagesMV 1 Lab ReportGoh Leng TeckNo ratings yet
- Emm3812 - Static and Dynamic BalancingDocument7 pagesEmm3812 - Static and Dynamic Balancingsyamil100% (2)
- Cad and Tappet Full ReportDocument30 pagesCad and Tappet Full ReportRubaveeran GunasegaranNo ratings yet
- PDMS Balance 0512 - Field BalancingDocument83 pagesPDMS Balance 0512 - Field Balancingramnadh803181100% (1)
- MACHINE DYNAMICS LAB MANUALDocument30 pagesMACHINE DYNAMICS LAB MANUALFebin EbyNo ratings yet
- Module ADocument18 pagesModule AfaizalfitriahaliNo ratings yet
- Acceleration Due To Gravity Ishan Sharma 2148139Document12 pagesAcceleration Due To Gravity Ishan Sharma 2148139Ishan SapkotaNo ratings yet
- Domlabmanualnew 110517072428 Phpapp02Document44 pagesDomlabmanualnew 110517072428 Phpapp02Mandeep Singh PundirNo ratings yet
- Mech 343 Lab Report 1Document22 pagesMech 343 Lab Report 1Yousef MeguidNo ratings yet
- Design of Stub Axle and Static+dynamic Analysis On Solid Works With Calculations For Shell Eco Marathon Competition.Document5 pagesDesign of Stub Axle and Static+dynamic Analysis On Solid Works With Calculations For Shell Eco Marathon Competition.Hammad SajjadNo ratings yet
- Design of Half-Car Active Suspension System For Passenger Riding ComfortDocument7 pagesDesign of Half-Car Active Suspension System For Passenger Riding ComfortPankaj SharmaNo ratings yet
- Mech 343 Lab 1 ReportDocument18 pagesMech 343 Lab 1 ReportYousef Meguid0% (1)
- An 1007 EstimatingVelocityAndPositionUsingAccelerometersDocument8 pagesAn 1007 EstimatingVelocityAndPositionUsingAccelerometersAnderson OliveiraNo ratings yet
- Experiment M4Document17 pagesExperiment M4Ann Shen ThianNo ratings yet
- 01 - Fatigue Analysis of Aircraft Landing GearDocument8 pages01 - Fatigue Analysis of Aircraft Landing GearAeronautical Engineering HODNo ratings yet
- Lift and Drag Lab Report Raphael EfstathiouDocument9 pagesLift and Drag Lab Report Raphael EfstathiouRaphael EfstathiouNo ratings yet
- AMME2500 - Engineering Dynamics: Gyroscopic System - Scientific ReportDocument10 pagesAMME2500 - Engineering Dynamics: Gyroscopic System - Scientific ReportlollipopNo ratings yet
- C. Kalavrytinos - FEA of A Steering KnuckleDocument26 pagesC. Kalavrytinos - FEA of A Steering KnuckleChristos Kalavrytinos100% (7)
- Kinematics Final PrintDocument7 pagesKinematics Final PrintBrady BriffaNo ratings yet
- Active Suspension System For Heavy VehiclesDocument5 pagesActive Suspension System For Heavy VehiclesandersonNo ratings yet
- Rajshahi University of Engineering and Technology, RajshahiDocument9 pagesRajshahi University of Engineering and Technology, RajshahiShakil Ahmed100% (1)
- Intelligent Reverse Braking SystemDocument21 pagesIntelligent Reverse Braking SystemAlfieNo ratings yet
- Lab ManualDocument38 pagesLab ManuallaligastcNo ratings yet
- Edl 47Document36 pagesEdl 47sadiaNo ratings yet
- Fluid LabDocument8 pagesFluid Labzidan alsbeheNo ratings yet
- Engg DynamicsDocument26 pagesEngg DynamicssadiaNo ratings yet
- Design of Deployment Mechanism of Solar Array of A Sample Satellite and Investigation of Deployment On Control Attitude of SatelliteDocument5 pagesDesign of Deployment Mechanism of Solar Array of A Sample Satellite and Investigation of Deployment On Control Attitude of SatelliteShoaib IqbalNo ratings yet
- Exp 6Document25 pagesExp 6Faiz MsNo ratings yet
- MEMB 331 Full Report Almost CompleteDocument27 pagesMEMB 331 Full Report Almost CompletemonsterpeqNo ratings yet
- CE 223 LAB 2, 17300275, Mathew YUKA-BECV-2,2020 PNGUOTDocument10 pagesCE 223 LAB 2, 17300275, Mathew YUKA-BECV-2,2020 PNGUOTMathew YukaNo ratings yet
- To Ascertain The Efficiency and Limiting Efficiency of Pulley SystemsDocument7 pagesTo Ascertain The Efficiency and Limiting Efficiency of Pulley SystemsNader MohammedNo ratings yet
- DinamikDocument10 pagesDinamikEswaran ManakorNo ratings yet
- Experiment 2Document11 pagesExperiment 2Zoe FormosoNo ratings yet
- Determining Moment of Inertia Using Falling Weight MethodDocument3 pagesDetermining Moment of Inertia Using Falling Weight MethodSaad AliKhanNo ratings yet
- Research Paper Optimization of Shaft Design Under Fatigue Loading Using Goodman MethodDocument5 pagesResearch Paper Optimization of Shaft Design Under Fatigue Loading Using Goodman MethodIshwar PatilNo ratings yet
- 25122017journal Bearing ApparatusDocument7 pages25122017journal Bearing Apparatus3059 SUNARAM HANSDAHNo ratings yet
- Surigao State College of Technology Surigao City-Main Campus College of Engineering and Information TechnologyDocument8 pagesSurigao State College of Technology Surigao City-Main Campus College of Engineering and Information TechnologyKim SomeraNo ratings yet
- Lab Session Verifies Impulse Momentum PrincipleDocument8 pagesLab Session Verifies Impulse Momentum PrincipleqamarNo ratings yet
- B3 Study of Shock AbsorbersDocument10 pagesB3 Study of Shock AbsorbersAkash BargeNo ratings yet
- Kinematics and Dynamics of Machinery - Experiments PDFDocument47 pagesKinematics and Dynamics of Machinery - Experiments PDFUtkarsh SinghNo ratings yet
- Lab 1Document19 pagesLab 1dasdasdNo ratings yet
- Gyroscope Couple and Precession Motion ExperimentDocument11 pagesGyroscope Couple and Precession Motion ExperimentronaldoNo ratings yet
- 02 Physics 11se Ch02Document30 pages02 Physics 11se Ch02pecan_lisa38No ratings yet
- Module DDocument32 pagesModule DfaizalfitriahaliNo ratings yet
- Lab ManualDocument9 pagesLab ManualMohit SinhaNo ratings yet
- Rolling Disk Lab Report Applied DynamicsDocument7 pagesRolling Disk Lab Report Applied DynamicsAliNo ratings yet
- MECH 343 Exp 4-2-18Document17 pagesMECH 343 Exp 4-2-18Omar KassemNo ratings yet
- LabSheet2 (Traversing) PDFDocument9 pagesLabSheet2 (Traversing) PDFElilragiGanasanNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Materials Science and Technology of Optical FabricationFrom EverandMaterials Science and Technology of Optical FabricationNo ratings yet
- 0 IE 2130E Tutorial Problems - 2017 - S2Document7 pages0 IE 2130E Tutorial Problems - 2017 - S2Denise Isebella LeeNo ratings yet
- LadderDocument1 pageLadderDenise Isebella LeeNo ratings yet
- GMAT Exam SuccessDocument416 pagesGMAT Exam Successkedari007100% (2)
- WISP-SEG-10 Rev01 SEG Gas ManagementDocument12 pagesWISP-SEG-10 Rev01 SEG Gas ManagementDenise Isebella LeeNo ratings yet
- Application Form SkillsFutureStudyAwardDocument3 pagesApplication Form SkillsFutureStudyAwardDenise Isebella LeeNo ratings yet
- Nuclear Power in SingaporeDocument6 pagesNuclear Power in SingaporeDenise Isebella LeeNo ratings yet
- LadderDocument1 pageLadderDenise Isebella LeeNo ratings yet
- (49466735zdvzsv6) 7 Appendsdczsdvsvix C4 - Compliance ChecklistDocument15 pages(49466735zdvzsv6) 7 Appendsdczsdvsvix C4 - Compliance ChecklistDenise Isebella LeeNo ratings yet
- Me2134e - Lecture 1 - Aug2012-1Document50 pagesMe2134e - Lecture 1 - Aug2012-1Denise Isebella LeeNo ratings yet
- BIDDIedNGNO 1u00511sxDocument19 pagesBIDDIedNGNO 1u00511sxDenise Isebella LeeNo ratings yet
- WISP-SEG-08 Rev01 SEG Chemical ManagementDocument26 pagesWISP-SEG-08 Rev01 SEG Chemical ManagementDenise Isebella LeeNo ratings yet
- ME4213E Tutorial 1Document4 pagesME4213E Tutorial 1LinShaodun100% (1)
- 1314sem2 Me3251Document4 pages1314sem2 Me3251Denise Isebella LeeNo ratings yet
- Exercise 2 2Document3 pagesExercise 2 2Denise Isebella LeeNo ratings yet
- 1112SEM2-ME4213 MEh4213EDocument5 pages1112SEM2-ME4213 MEh4213EDenise Isebella LeeNo ratings yet
- Crystal Structures: Simple Cubic, Fcc, BccDocument10 pagesCrystal Structures: Simple Cubic, Fcc, BccDenise Isebella LeeNo ratings yet
- 1112SEM2-ME4213 MEh4213EDocument5 pages1112SEM2-ME4213 MEh4213EDenise Isebella LeeNo ratings yet
- Fluid Mechanics Formula SheetDocument5 pagesFluid Mechanics Formula SheetDenise Isebella LeeNo ratings yet
- Brick BondsDocument7 pagesBrick BondsAMontoyaNo ratings yet
- ME2151E Learning OutcomesDocument1 pageME2151E Learning OutcomesDenise Isebella LeeNo ratings yet
- ME Materials Engineering Fundamentals Atomic Structure DiffusionDocument10 pagesME Materials Engineering Fundamentals Atomic Structure DiffusionDenise Isebella LeeNo ratings yet
- TM2401 FourierDocument58 pagesTM2401 FourierDenise Isebella LeeNo ratings yet
- Add A RadiatorDocument6 pagesAdd A RadiatormickyalemuNo ratings yet
- ME2151E Tut 1 PDFDocument21 pagesME2151E Tut 1 PDFchenshicatherineNo ratings yet
- Shine Jun2013Document7 pagesShine Jun2013Denise Isebella LeeNo ratings yet
- Waterproof Your RoofDocument6 pagesWaterproof Your Roofmarius_alex_32No ratings yet
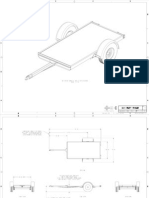
- 4x8 Utility Trailer Assembly Drawings and DiagramsDocument18 pages4x8 Utility Trailer Assembly Drawings and Diagramscualete100% (1)
- 1341 Oxygen Bomb Calorimeter Manual PDFDocument11 pages1341 Oxygen Bomb Calorimeter Manual PDFDenise Isebella LeeNo ratings yet
- Class Time-Table For ME Essential - SemI - AY1314Document7 pagesClass Time-Table For ME Essential - SemI - AY1314Law Zhan HongNo ratings yet
- STC5 Risk Management and Safe Work ProcedureDocument36 pagesSTC5 Risk Management and Safe Work ProcedureDenise Isebella LeeNo ratings yet
- Dcit-50 ReviewerDocument5 pagesDcit-50 ReviewerJessie Bhea SungcangNo ratings yet
- Abracon 2021 Antenna CatalogDocument42 pagesAbracon 2021 Antenna CatalogRudi SusantoNo ratings yet
- Operating System Kcs-401. Question Bank Unit-Ii: Concurrent Processes 2018-19Document2 pagesOperating System Kcs-401. Question Bank Unit-Ii: Concurrent Processes 2018-19Nishant MishraNo ratings yet
- Product Data Sheet Metco 3MB Series Plasma Spray Guns: Model Operation CE-ConformantDocument4 pagesProduct Data Sheet Metco 3MB Series Plasma Spray Guns: Model Operation CE-ConformantSerhii MishchenkoNo ratings yet
- Module-1 Data Analytics in Healthcare SystemsDocument23 pagesModule-1 Data Analytics in Healthcare SystemsAditya GuptaNo ratings yet
- APG IdentifyProcessesDocument2 pagesAPG IdentifyProcessesMitul PatelNo ratings yet
- INSTALLATION MANUAL FOR PANASONIC KX-T61610B ELECTRONIC MODULAR SWITCHING SYSTEMDocument12 pagesINSTALLATION MANUAL FOR PANASONIC KX-T61610B ELECTRONIC MODULAR SWITCHING SYSTEMHesham ElsayedNo ratings yet
- Scrum Master Interview QuestionsDocument55 pagesScrum Master Interview Questionsshivaramreddy6950% (2)
- IS5312 Mini Project-2Document5 pagesIS5312 Mini Project-2lengbiao111No ratings yet
- Nathan Barry - The App Design Handbook-The Pragmatic Programmers (2013)Document126 pagesNathan Barry - The App Design Handbook-The Pragmatic Programmers (2013)Leandro Alberto Villanueva MancillaNo ratings yet
- Software Requirements Document For UberDocument5 pagesSoftware Requirements Document For Ubermohammadakram9351No ratings yet
- Roku Ad Manager GuideDocument18 pagesRoku Ad Manager GuideMichaelNo ratings yet
- Jury Stability TestDocument7 pagesJury Stability TestSunil GiriNo ratings yet
- X20 Module - Bus Modules - BM01Document2 pagesX20 Module - Bus Modules - BM01JEYSONNo ratings yet
- Topic 7 Digital Audio ProductionDocument90 pagesTopic 7 Digital Audio ProductionUmairah AzmanNo ratings yet
- Esim ProgrammerDocument198 pagesEsim ProgrammerWeslley MouraNo ratings yet
- Electronic Fuel Management Systems: Making Sure You're in Complete Control, From Anywhere, All The TimeDocument50 pagesElectronic Fuel Management Systems: Making Sure You're in Complete Control, From Anywhere, All The Timesaba0707No ratings yet
- (PDF) Sop For Repurposing VideosDocument17 pages(PDF) Sop For Repurposing VideosPrincess JoemNo ratings yet
- Primavera P6 Vs MSPDocument7 pagesPrimavera P6 Vs MSPKaran AvadNo ratings yet
- Shopping CartDocument1 pageShopping CartfrNo ratings yet
- RIA46 ManualDocument80 pagesRIA46 ManualVictor HenriquezNo ratings yet
- Derrick/Mast Inspection CertificateDocument1 pageDerrick/Mast Inspection Certificatephilip williamsNo ratings yet
- Report About : University of Zakho College of Engineering Mechanical DepartmentDocument8 pagesReport About : University of Zakho College of Engineering Mechanical DepartmentAhmed AmirNo ratings yet
- SpeedFace V3LDocument2 pagesSpeedFace V3LAdolfo Becker Morales HuamánNo ratings yet
- Stxplus Signal Transmitter Installation and Operation ManualDocument76 pagesStxplus Signal Transmitter Installation and Operation ManualmartinxueloNo ratings yet
- SOUND CARD - Emagic A 62 en PDFDocument84 pagesSOUND CARD - Emagic A 62 en PDFLodewyk KleynhansNo ratings yet
- Traffic Modeling Using Power Consumption of Base Station - The Case of Ethio Telecom-2018Document71 pagesTraffic Modeling Using Power Consumption of Base Station - The Case of Ethio Telecom-2018Hilina MedferNo ratings yet
- Design and Optimization of Spur Gear: Final ReviewDocument41 pagesDesign and Optimization of Spur Gear: Final ReviewVirat KiranNo ratings yet
- PGH I-Device 76Document95 pagesPGH I-Device 76Nihat GüvenNo ratings yet
- Tal Charnes Programming Team LeaderDocument1 pageTal Charnes Programming Team Leaderapi-348179385No ratings yet